往复流作用下深水网箱的单锚腿系泊系统设计及效用评估
2020-01-09 01:59:42王绍敏袁太平陶启友郭杰进刘海阳黄小华
海洋渔业 2019年6期
王绍敏,袁太平,陶启友,郭杰进,胡 昱,刘海阳,黄小华
(中国水产科学研究院南海水产研究所,农业部外海渔业开发重点实验室,广东省网箱工程技术研究中心,广州 510300)
系泊系统在深水网箱养殖的安全性中扮演重要角色,目前网箱于使用海域的系泊主要采用辐射式多点系泊方式,由于多点系泊对施工要求较高,对于缺乏专业施工装备的养殖产业存在较高难度。深海养殖需要占用海域,在有限海域中尽可能多地布置养殖网箱是获取更高养殖经济效益的手段之一,由于安全系泊半径的要求,辐射式多点系泊方式往往会占用较多海域面积,且水深越深海域占用越多,导致网箱布置数量受到限制。这些问题一定程度上制约了网箱养殖向深远海发展。
单点系泊系统在海洋工程领域较为常见,其中单锚腿系泊系统 SALMS(single anchor leg mooring system)[1-2]属于单点系泊系统形式之一,主要依据配重缓冲系统或浮筒缓冲系统,通过提升系统刚度以降低速度、减小位移实现能量吸收而达到系泊的目的,同样运用了相关原理的还有软钢臂单点系泊系统[3-6],具有工作稳定、海况适应度高的特点。由于具备投资小、易于回收、施工简便、工期较短,抵抗恶劣环境优势明显等诸多优点,加上单点系泊特殊的风标效应可给养殖行为带来较好的生态优势,近些年来单点系泊已得到网箱养殖产业相关学者的关注。HUANG等[7-8]研究了多环境载荷条件下单点系泊网箱的结构性能及可靠性,并分析了不同规格PE(polyester)材料构成的单点系泊系统的疲劳特性;DECEW等[9]分别采用试验方法和数值仿真方法分析了一种单点系泊的梯形网箱在纯流作用下的动力特性;SHAINEE等[10-11]计算了规则波、随机波和均匀流作用下单点系泊网箱的自潜特性,评估了该类网箱应用于深远海的可行性;XU等[12]通过数值模拟分析了单点系泊自潜重力式网箱在波流组合中的水动力特性,比较了网箱正面有无框架情况下网箱的变形量。但是上述研究大都聚焦于养殖网箱本身,忽略了系泊系统的三维效应和系泊系统的动力特性。总的来说,国内在系泊系统和网箱的耦合动力分析及效用评估方面研究目前还不够完善。
因此,本研究依据产业自身需求并借鉴海洋工程领域单点系泊系统特点,专门设计一型可应用于往复流情况下的新型单锚腿单点系泊系统,与网箱建立耦合分析模型,系统分析系泊系统的动力特性。着重研究锚泊线顶端激励、浮筒位移距离以及绑系网箱的浮缆张力变化,评价系泊系统的安全性、海域利用率和适用性等方面的效用,以期为网箱系统设计与产业发展提供参考。
1 材料与方法
1.1 单锚腿系泊系统
系泊系统实际运用时作为受迫振动系统,其运动方程的一般形式[13]为:

式(1)中,M为系统的总质量矢量,C为系统的总阻尼矢量,K为系统的总刚度矢量,F(t)为系统所受外力,、X分别为加速度、速度和位移。
分析式(1)可知,当系统外力F(t)既定的情况下,系泊物的位移与系泊系统的总刚度K密切相关。对网箱而言,系泊系统的水平刚度主要提供网箱水平方向的恢复力,该恢复力主要通过系泊腿的悬链线自重和预张力提供;而在垂直方向上,恢复力主要由系统顶端浮体自身浮力提供,多数传统网箱的系泊便是直接将系泊缆索与网箱浮管连接,由浮管的浮力提供垂向恢复力,该连接方法增加了浮管的承载负担,最终会影响网箱安全[14-18]。
养殖行为过程中对占海面积小的要求,最终即是要求系泊网箱离开初始位置的距离短、系泊系统的系泊半径小或是尽可能长的以海底卧链形式呈现,因此本研究以高效利用海域面积为目标,设计一种符合养殖行业的新型、简易且施工方便的单锚腿系泊装置以供深远海养殖网箱选择,设计图如图1-a所示。
如图1所示,系统由水面浮筒、海床重量1、海床重量2和船锚通过中间锚链连接组成,其工作原理为:系统工作过程中,网箱因为受到环境合力发生位移,带动水面浮筒离开初始平衡位置“Ⅰ”,平衡于新位置“Ⅱ”处,此时的状态为钢链B发生偏转、浮筒吃水增加、重量1未离开海床;当极限海况情况发生,网箱遭受更高的环境载荷时,进一步带动浮筒从位置“Ⅱ”处平衡于位置“Ⅲ”处,此时的状态为钢链B进一步发生偏转、浮筒吃水更大、重量1离开海床、钢链C发生偏转但重量2依旧保持于海床上,维持重量2持续在海床上的状态以防止对锚产生上拔力而走锚,达到网箱于指定点安全系泊的目的。水面浮筒与海床重块之间形成一个“柔性缓冲臂”[19]并使系泊系统自带两级刚度,最终实现养殖网箱于各环境条件下的系泊要求。系泊系统主要构成部件参数为:水面轻质浮筒(聚脲塑料)体积4.5 m3,净浮力 4 220 kg;重量 1自重 5 760 kg;重量 2自重1 500 kg;锚为大抓力船锚,自重 500 kg;浮缆A选用直径φ36 mm的纤维绳,破断负荷174 kN,锚链B、C和D均选用链径 φ22 mm的AM2级有档锚链,破断负荷240 kN,用来抵御环境载荷。由于养殖海域流场的往复现象,实际将置于海床上的部份镜像对称设置,以应对往复流作用下的各类极限海况,如图1-b所示。
1.2 系泊系统刚度验证
海域实测可直接获取研究所需的数据,具备数据直观可靠的特点。为获取上述设计系统的水平刚度,开展相应的实测试验,实测地点位于我国南海北部某岛海域西侧,平潮水深12.7 m,数据采集系统为量程100 kN的水密高灵敏度拉力传感器与配套采集系统,传感器设置于浮筒与锚链B的连接处,数据采集系统设置于浮筒顶部。等待平潮、微风、有义波高约0.5 m的天气窗口时展开实测。实测环节,由渔船展开拖带作业实现浮筒沿X向离开平衡位置,在锚链B中产生对应张力,由传感器测量获得系泊系统的实测数据。
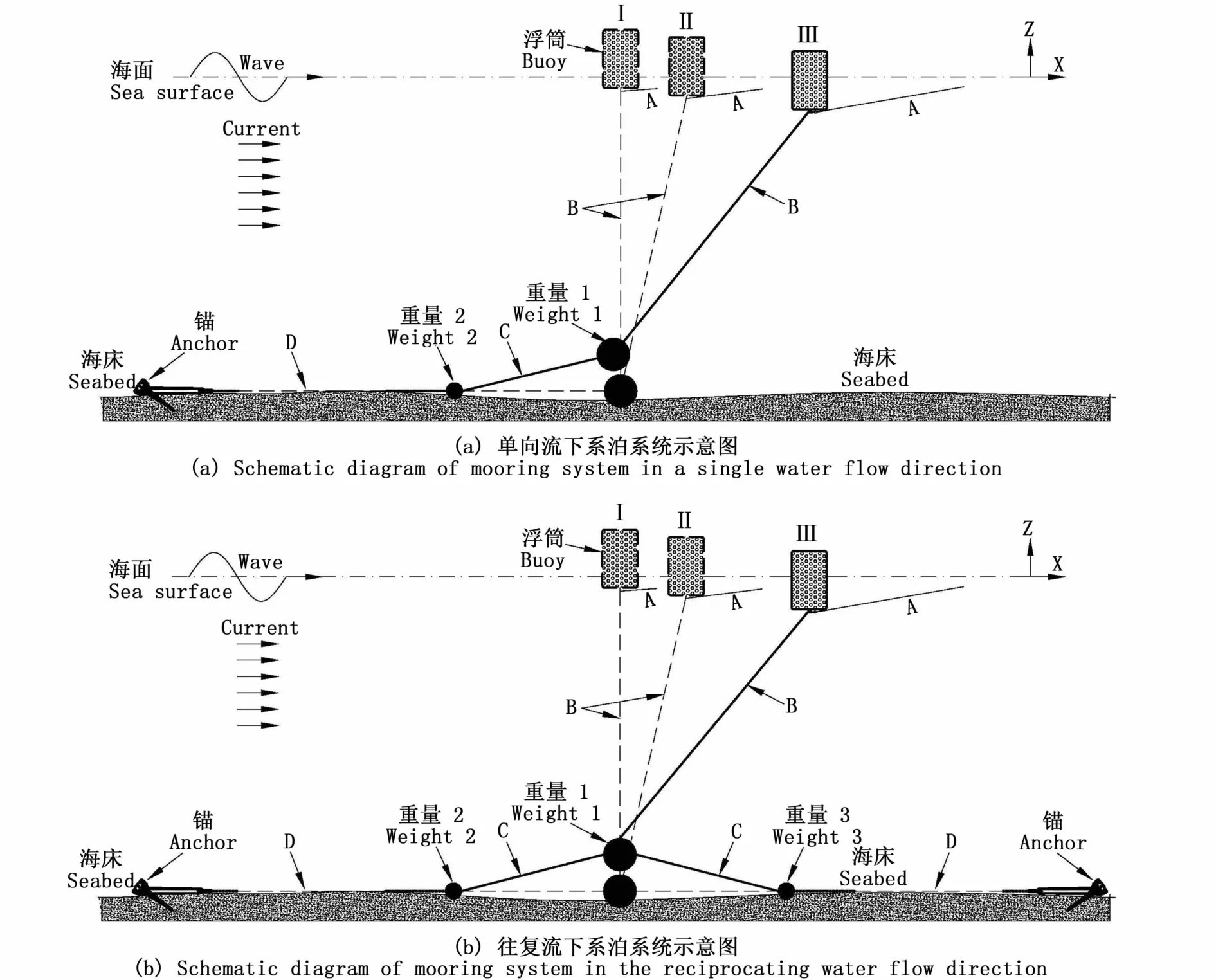
图1 单锚腿系泊系统示意图Fig.1 Schematic diagram of single anchor leg mooring system
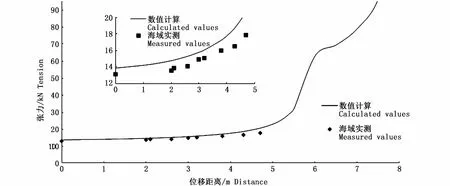
图2 水平刚度曲线Fig.2 Horizontal stiffness curve
同时对实际海域布置的系泊系统水平刚度进行了数值分析,数值方法基于三维势流理论,以面元法对浮筒进行水动力计算,获取其水动力系数后于时域内完成与系泊系统其它部件的耦合计算,获取不同偏移距离下锚链处张力值,详见文献[13]。计算结果与实测数据吻合较好,如图2所示,数值刚度曲线具有两级跃升的特点,说明了系泊系统具备两级刚度,可实现系泊系统较大范围的安全性与适用性。同时,实测数据略小于数值计算结论,主要原因有:1)可能平潮水位水深的实际测量值存在误差,最终选择的12.7 m大于实际水深;2)系统是以平潮水位设计,实测处于潮水回落时期,测试海域水深逐渐减小,浮筒吃水减小,导致浮筒离开设计的水平平衡位置时钢链张力值偏小。但数值模拟结果和实测值最大相对误差在可接受范围,如,当浮筒离开平衡位置4.7 m时,锚链张力实测统计平均值为17.9 kN,数值计算理论值为20.75 kN,相对误差为13.75%;同时数值计算值变化趋势与实测值变化趋势基本一致,可认为本研究数值方法具备一定合理性和精度。
1.3 网箱受力验证
为保证系泊系统的安全性,进一步对系泊浮体——网箱受力进行计算。网箱材料和模型采用LADER等[20]的有关数据:采用尼龙材质圆柱体外形的网衣由不锈钢顶圈支撑,顶圈直径1.46 m,不锈钢管直径0.025 m,网衣直径 1.435 m,高度1.44 m;网衣是由2块方形网目:目脚长16 mm、网线直径1.8 mm、长125目、宽81目的矩形网片对接拼成;配重为16个柱形金属砝码,每个砝码质量400 g,沿圆周方向均匀布置在网衣的底端;实验流速为 0.13 m·s-1、0.21 m·s-1、0.26 m·s-1、0.33 m·s-1、0.52 m·s-1。同时,采用的数值计算理论、方法与本研究作者前期有关计算理论、方法一致[21],即采用基于缆索动力学开发的专用软件OrcaFlex,对试验网箱的物理参数进行数值建模并展开计算,计算值与实验值比较如表1所示。从表1可以看出,数值模拟结果与实验结果变化趋势一致,各速度下误差最大值不超过9%,同样验证了数值方法的合理性,为后续浮体与系泊系统耦合动力分析奠定了基础。

表1 网箱流场作用力比较Tab.1 Comparison of drag force on the net between calculated and experimental results
1.4 系泊系统与浮体耦合
系泊系统和浮体在海洋环境载荷作用下的耦合动力分析对二者结构的安全性和可靠性评估具有重要意义。因此针对所设计的系泊系统与养殖网箱开展耦合计算,进一步研究系泊系统主要构件如浮缆A、钢链B、浮筒在各典型工况下的受力与运动变化趋势,可以为单锚腿单点系泊系统结构的效用评估提供依据。依据图1-b,于平潮水深为D=15 m的养殖海域,设定系泊系统与系泊网箱构成的耦合系统坐标原点为网箱浮管系泊点处,系泊对象选用文献[21]中截面积(网箱占海面积)为127.33 m2的的 NACA0030对称翼形网箱,翼型网箱如图3所示。系泊系统的主要构成部件参数及坐标分别为:浮缆A长24 m,钢链B长14 m,钢链 C长5 m,钢链 D长10 m;浮筒初始位置(-24,0,0);重量 1初始位置(-24,0,-D);重量2初始位置(-29,0,-D);重量3初始位置(-19,0,-D);两个船锚初始位置分别为(-39,0,-D)和(-9,0,-D);养殖海域的环境条件如表2所示。

图 3 翼型网箱[21]Fig.3 Airfoil net cage[21]
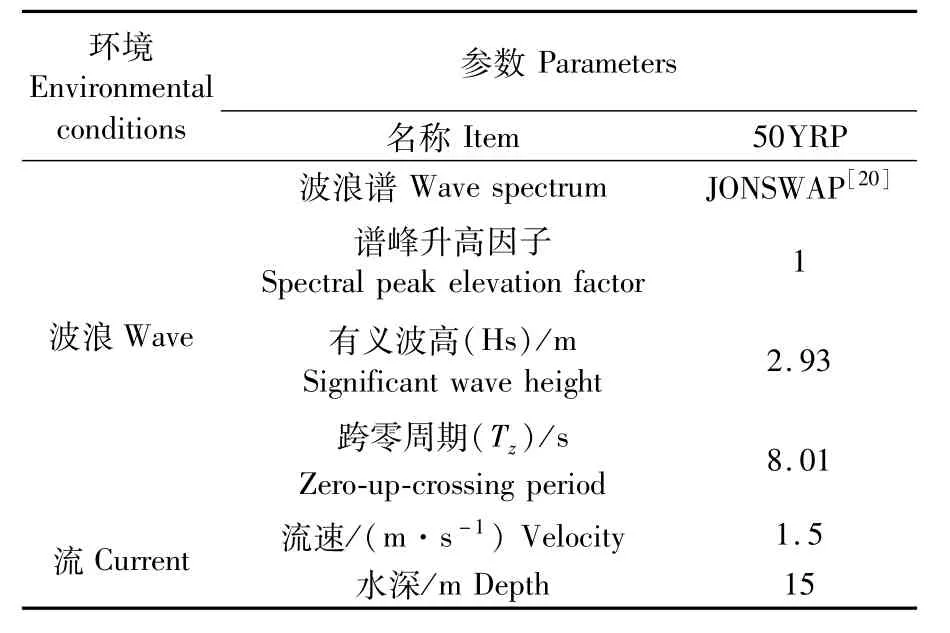
表2 养殖海域环境条件Tab.2 Environmental conditions in cultured sea areas
耦合系统于海洋中使用时会遭受不同方向浪流载荷的作用,以系泊系统为例,浪流作用方向如图4所示。在当地坐标系X′O′Y′下,依据系统的对称性,从[0°,90°]范围内选取典型工况进行计算,遴选对新系泊系统最不利的环境条件。为了找到各种不利工况,在工况遴选范围内除了对流向为0°的情况进行了有关计算外,实际还存在可能因施工过程中出现的误差导致的与流往复方向存在的角度差别,将流向为45°的组合也进行了计算,共形成7个工况。
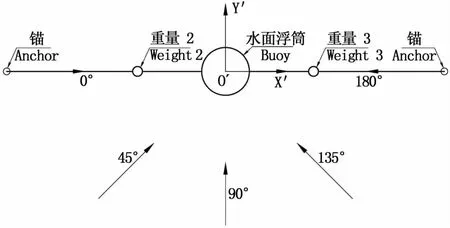
图4 系泊系统典型环境工况划分示意图Fig.4 Schematic diagram of typical environmental conditions
2 结果与讨论
2.1 钢链张力最大值
通过浪、流各方向的组合,对形成的7个工况进行了计算,7个环境工况情况下钢链B中的张力统计值如表3所示。计算表明,在流向一定时,浪流同向工况(浪 45°、流 45°,浪 0°、流 0°,浪90°、流90°)下钢链B中的张力值会大于浪流非同向工况,而且3种同向工况的张力极值随着角度值增加而增加,在浪流均垂直于锚-锚连线的工况(浪 90°、流 90°)下,钢链 B受力达到最大53.33 kN。这是因为水面浮筒和重量1通过钢链B连接构成一个振荡系统,当系统各部件在外力作用下发生振荡时,重量1的位移与加速度随环境合力方向角度的增加而增加,如图5所示,最终可导致系统部件的振荡运动相位之间的差异,从而诱导出更大的锚链张力,为安全起见对该工况进行重复计算。
波浪种子是确保时域波浪随机性的重要参数,改变种子数可保证波浪在满足统计意义要求的条件下生成不同的波浪组合,最终确保计算结果的一般性。依据海洋工程领域相关系泊标准的要求,采用动力分析法核算,需进行至少5个波浪种子条件下的计算,张力最大值按式(2)[22]进行计算:

式(2)中,n为波浪种子数,Ti为不同种子条件下的张力极值,a=0.3。本研究计算了10个波浪种子条件,如表4所示,钢链B中最大值的均值为50.20 kN,依据式(2)计算张力最大值为50.93 kN,破断负荷240 kN,安全系数K=240/50.93=4.71,可见张力最大的工况下,可以保障锚泊系统的安全性。

表3 各工况下钢链B的张力统计Tab.3 Tension statistics of chain B under typical working conditions
2.2 钢链张力稳定性
进一步对各计算工况下数据的离散性进行计算,分析其稳定性。通过表3可知,7个工况下钢链B的张力标准差随着浪流方向间夹角的增加而增加,且浪90°、流0°的工况标准差最大,为6.82 kN,反映浪流环境载荷以相互垂直施加于该系泊系统时系统部件的运动稳定性稍弱,设计时候需要格外注意。该海况下锚链B的张力时历曲线如图6所示。对特殊工况下的张力展开极值分析是确保设计符合安全要求的常用手段之一,海洋工程领域一般认为短期海况符合窄带瑞利分布,结构物的运动与受力亦认为符合瑞利分布[23-25]。瑞利分布函数为:

式(3)中x为样本,σ为样本标准差。依据OCHI[26-27]的研究,在高斯假定下风暴周期T中最可能出现的最大值由公式FMAX=μ+σ[2ln(n)]1/2计算,其中 ,n=T/Tz>10是受力波峰的数量,本研究T=500 s,μ和Tz分别是受力时间历程的平均值和跨零周期。浪90°、流0°的工况下通过极值分析计算,该工况下最可能出现的最大值为55.12 kN,相比扫略计算值产生了8.74 kN的增幅。安全系数K=240/55.12=4.35,系统在该工况下依旧保持较高的安全裕度。

表4 10个波浪种子数下各张力计算值Tab.4 Calculated values of each tension under 10 wave seed conditions

图5 重量1 X向运动加速度时历曲线Fig.5 Time history curves of weight 1 X-direction motion acceleration under different working conditions
由于极值分析情况下会出现张力的增幅,需对张力最大值的工况(浪90°、流90°)再次以该方法进行校核,确保安全性。通过对波浪种子1条件下的极值分析,该工况最可能出现的最大值为FMAX=37.55+5.19×2.88=52.47(kN),相比扫略计算值产生 53.33-52.47=0.86(kN)的降幅,而相比多种子条件下的值产生52.47-50.93=1.54(kN)的增幅。由此可知,本研究涉及的系泊系统应采用极值分析法校核,可以确保系泊系统各工况下的安全,此时安全系数K=240/52.47=4.57。危险工况下以不同极值计算方法对安全系数进行计算后,综合评估单锚腿系泊系统具备各工况下的安全性。
2.3 系泊网箱偏移量
系泊网箱沿浪流合力方向离开平衡位置的距离,是在极端海况下网箱所需海域面积的度量指标之一,离开平衡位置距离短表明极端海况下网箱所需的海域面积小,同等海域面积下可布置更多网箱,海域利用率高。为了评估本研究所设计系泊系统在用海方面的贡献量,以系泊系统中的水面浮筒为对象,计算其在环境载荷方向的偏离距离,相关统计情况见表5。由表5可知,各工况下浮筒离开平衡位置的最大距离是浪流均为90°工况时的8.99 m,偏离平衡位置最大值最小的是浪90°、流 0°的工况,为 6.74 m;环境载荷同向工况下的最大偏离距离大于其他非同向的工况,3种同向工况下的最大偏离距离随角度值的增加而增加,该情况与钢链B的张力变化情况类似,说明浮筒偏离距离大小是引起钢链B中张力增减的原因之一;最大运动幅值为浪流均为45°工况下的4.14 m,最小运动幅值为浪90°、流0°工况下的2.42 m,其他工况下均比较接近,说明系泊系统总体工作情况稳定。综合分析,浮筒各工况下偏离平衡位置最大距离不超过9 m,所设计的单锚腿单点系泊系统可实现高海况下较小的海域使用面积,若与网箱合理匹配,有助于提升海域利用率。

图6 浪90°、流0°海况下锚链B的张力时历曲线Fig.6 Tensile time history curve of chain B under 90°wave direction and 0°current direction sea conditions
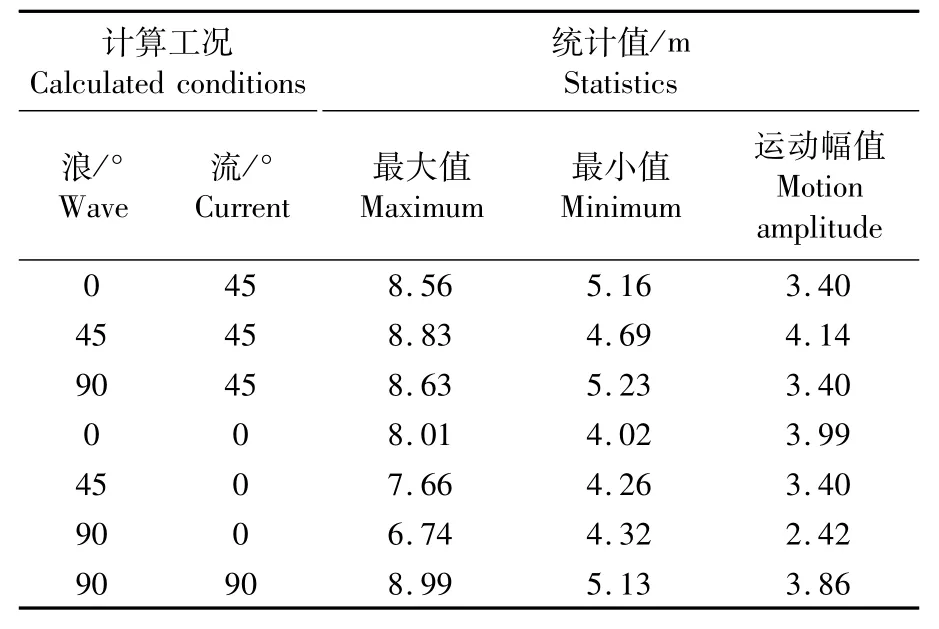
表5 各工况下浮筒离开平衡位置统计Tab.5 Distance statistics of float buoy drift under various working conditions
2.4 浮缆长度优化
本研究采用浮缆实现系泊系统与网箱的连接,轻质浮缆具备经济、耐用和便于操作的优点。浮缆A的长度选取也直接关系到养殖海域的使用率,浮缆长则需要的海域大,海域使用率低;反之,浮缆短则需要的海域小,海域使用率高。为合理选取浮缆长度,以浪90°、流90°为典型工况,计算了不同浮缆A长度(10 m、16 m、24 m、30 m、36 m)下的受力,张力极值变化情况如图7所示。浮缆A的受力最大值与其长度密切相关,在同等海况下,其张力极值随长度的增加呈降低趋势。最小安全系数为K=174/39.32=4.43,可见在长度为10 m的情况下也能保证系泊安全,但比16 m时张力增加较快,因此建议实际运用时可适当增加浮缆A长度,并依据海域网箱布置数量情况恰当选择浮缆A长度。

图7 不同长度下浮缆A的张力极值变化曲线Fig.7 Tensile extreme value curve of rope A under different lengths
将该单点系泊系统置于不同水深,并通过调整钢链B长度(水深D-1)、保持其他部件参数不变的方式展开部件受力计算与分析,计算工况为浪90°、流90°,钢链B与轻质浮缆A的张力统计值见表6。钢链B和浮缆A中的张力最大值、标准差均随着水深的增加呈现先降低后增加的趋势,大约在30 m水深达到最小值;而当水深超过40 m时,两个部件内的张力极值都呈现了跃升,原因可能是此时水面浮筒已经浸没于海面,诱导了钢链B中的张力快速增加,也导致水面浮缆A与水平面之间的夹角增加,而致使张力增加。通过标准差的变化趋势,该单点系泊系统最适应的水深约为30 m,该系统在该水深与环境条件下匹配性最优。

表6 不同水深情况下钢链B与浮缆A的张力统计Tab.6 Tension statistics of chain B and rope A under different water depths
3 小结
本研究通过借鉴单点系泊系统的优势,为网箱产业设计出一型可以实现占海面积小的单锚腿单点系泊系统,并对该系泊系统的安全与效用进行了研究分析,主要得到如下几点结论:
1)基于三维势流理论建立单锚腿系泊系统的刚度计算数值模型,通过系泊系统海域刚度实测,验证了数值计算精度,得出该类型的系泊系统具备两级刚度;利用基于缆索动力学软件OrcaFlex建立了网箱系统的受力变形数值模型,并依据文献实验结论验证了数值仿真的有效性。
2)开展单锚腿系泊系统与翼形网箱的耦合动力分析,确定该系泊系统具备较高的安全性,对工况扫略计算下的危险工况(浪90°、流90°)进行极值分析和多种子条件的对比计算,保证了结构的安全性。
3)为了对该系泊系统的使用效用进行评估,通过浮筒的偏移位置计算,验证了该系泊系统可实现海域利用率的提升;不同条件下的研究结果表明,该系泊系统可保障15~50 m水深下网箱的安全系泊,且最适宜30 m水深;水深一定情况下,浮缆A的受力随长度的增加而降低,可以根据实际需求确定最终的长度。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28 08:19:02
中国海洋平台(2022年5期)2022-11-01 09:54:50
山东冶金(2022年2期)2022-08-08 01:50:50
房地产导刊(2022年4期)2022-04-19 09:04:22
石油知识(2019年3期)2019-02-13 03:19:08
中国航海(2018年1期)2018-05-07 11:12:23
世界海运(2017年10期)2017-10-19 05:57:44
工业设计(2016年11期)2016-04-16 02:48:21
珠江水运(2016年3期)2016-03-23 14:34:47
舰船科学技术(2015年8期)2015-02-27 15:38:44