
空间极小推力宽范围可调推进技术研究进展*
2020-01-09 07:31刘旭辉汪旭东耿金越
空间控制技术与应用 2019年6期
李 永,刘旭辉,汪旭东,耿金越,龙 军,胡 鹏,秦 宇
0 引 言
新一代空间基础物理科学探测任务、高精度重力场测量任务以及高精度对地观测和卫星导航等空间任务,对卫星平台提出了超静低噪声、超高精度、超高稳定度的需求[1].在这种背景需求下,具有宽调节比、高精度、高分辨率的极小推力推进技术成为卫星平台的迫切需求[2-3].为了保证数据源的可靠性,星上会谨慎使用动量轮和陀螺等可能引起额外角加速度的转动部件,需要推力稳定、连续可调;推力分辨率高、推力噪声低、变推力范围大的微推进系统,通过低噪声连续可调的极小推力实时抵消大气、太阳光压、宇宙粒子等非保守力对航天器的干扰,使其在近乎“纯引力”的环境下运行[4-5].空间极小推力宽范围可调推进技术的应用需求包括两个方面:一类是无拖曳控制卫星平台,用于空间引力波探测、空间基础物理研究中的低频引力波探测、等效原理检验、短线程效应和参考系拖曳效应的测量以及高精度地球重力场测量等.另一类是超高精度超静控制卫星平台,用于空间高精度导航、高精度观测等任务.
空间极小推力宽范围可调推进技术是目前国际空间推进技术领域研究的前沿方向,涉及流体、基础材料、机电、控制等多个学科的基础问题[3-5].国内外多个研究机构都相继开展了多种不同机制极小推进技术研究,部分工作已经得到应用.本文对国内外几种典型的空间极小推力宽范围可调推进技术发展状况进行调研,分析其关键技术,提出未来发展建议.
1 空间极小推力宽范围可调推进技术介绍
空间极小推力宽范围可调推进技术是一种要求推力小且大范围连续可调的高精度微牛级推进技术.为保证测量精度,推进系统有高的推力稳定性和低的推力噪声.空间极小推力宽范围可调推进技术主要包括宽调节比极小推力冷气推进技术、宽调节比极小推力电推进技术.该类技术根据输出的过程参量的反馈,结合闭环控制,对可调物理参数的调控,从而实现输出推力的连续调节.
由于空间干扰力变化较大,对于大气阻力达到了毫牛量级,而空间射线、光压等干扰力为微牛量级,在抵消空间非保守力干扰时,随着环境以及卫星姿态轨道的变化,干扰力会发生极小的连续变化,最小可达亚微牛,同时,在进行无拖曳控制时,为了降低推力器自身产生的干扰对控制精度影响,对推力器的噪声功率谱密度也提出了严格要求.因此该类推进技术主要性能参数包括推力调节范围、推力分辨率、响应时间以及推力噪声,由于任务周期内所需要的总冲量有限,因此对比冲要求相对不高.冷气变推力模块调节范围达到了0.1~1 000 μN,调节范围达四个数量级,分辨率可优于0.1 μN,可以满足航天器在不同工况下平衡非保守力的要求;对于冷气推力器其输出推力受影响因素较低,直接物理量仅受流量影响,因此更易实现更高精度的推力控制,具有分辨率高、噪声低、调节范围宽、可靠性高等优点,ESA及NASA开展GAIA、Lisa Pathfinder、Microscope等任务均应用了冷气变推力技术.变推力电喷雾推进技术具有更高比冲,美国ST7计划和LISA Pathfinder卫星上采用了该技术进行了飞行验证,推力调节范围达到5~30 μN,推力器分辨率优于0.1 μN,完成了空间验证.
2 国内外几种典型技术发展现状
2.1 极小推力宽调节比冷气推进技术
国外早在60年代就开始了无拖曳航天器用冷气推进系统的研究和攻关,并先后应用于TRIAD I、GP-B、Lisa pathfinder等卫星上[6].现在世界上仅有美国、欧洲欧空局辖下各机构在一些无拖曳航天器的牵引下开展了无拖曳冷气推进系统的研制.“TRIAD-1”卫星是美国发射的海军导航卫星,其轨道高度为874 km,是全球首颗无拖曳航天器.为了使该卫星上惯性负载的加速度达到10-11g量级,该卫星采用了常规的定推力冷气推进系统对其干扰力进行补偿,通过控制推力器开关脉宽的办法来补偿干扰力的影响[7].变推力冷气推进系统采用的推进剂是氟利昂,采用两级机械减压系统.虽然推进系统携带的推进剂仅为1.4 kg,但其采用两个对称的贮箱,这样当气体损耗时,对质心的影响是对称的.受当时加工水平、减压器限制,其二级减压后压力要大于0.1 MPa,推力器喉部直径约为0.25 mm,此时产生的推力大约为5 mN左右.由于不能提供更小的推力,因此其无拖曳效果受到了影响,最后实际加速度控制精度仅达到10-5g~10-8g量级.虽然该卫星并没有取得最开始预计的理想结果,但是初步验证了无拖曳控制的可行性,也为后续的无拖曳推进技术的发展做了较好的积累.
针对空间时空测量,美国的科学家提出用搭载着超高精度陀螺的卫星来“看”空间的弯曲和扭曲.这种卫星就是引力探测器卫星Gravity Probe-B(GP-B).该航天器被称为新千年美国宇航局最富挑战性的项目.GP-B卫星也使用冷气推进系统作为其无拖曳控制的执行机构[8].4个陀螺由2 441 L超流体氦冷却至1.8 K,至少保持该温度18个月.每个陀螺都通过电力悬浮,以超过100 Hz的频率在真空度为10-14atm、磁场强度不超过10-7的环境中旋转.与“TRIAD-1”卫星不同,该卫星采用从真空容器内排出的氦气做为推进剂用于无拖曳控制.推力补偿系统通过推进器将陀螺的平均加速度降为不大于10-10g.该推力器采用开环控制系统,根据地面确定的结果,需要大推力时则通过加大加热功率的方式使得更多的推进剂进入到推力舱,从而达到增大推力的目的.推力器最大输出推力约为65×10-4N.该推力器实现了推力量级的进一步下降及开环比例调节,推力范围约为100~7 000 μN.
图1为LEONARDO公司用于GAIA卫星的冷气推进系统.一共布置了12个变推力冷气推力器模块,变推力范围为是1~500 μN.该公司的冷气变推力模块主要包含压电比例推力器和质量流量传感器两个部分.模块根据上位机指令,首先将推力换算为流量,然后根据质量流量传感器反馈值来调节带喷嘴的比例阀的喉部面积,使气体收敛至设定流量,从而实现推力的闭环控制.由于采用了闭环控制方法,该公司的产品在多个航天器上得到了成功应用.各系统指标等情况汇总见表1.

图1 极小推力冷气变推力推进技术Fig.1 Large-range cold gas thrust throttlingpropulsion technology

表1 无拖曳航天指标情况汇总表Tab.1 Summary of non-towed space index situation
在微牛级冷气变推力技术方面,国内主要研究单位是北京控制工程研究所.在十二五期间北京控制工程研究所研制了100~700 μN冷气推力器并进行推力开环测试.2018~2019年在天琴一号的牵引下,北京控制工程研究所对1~50 μN冷气变推力模块进行攻关,2019年8月完成工程样机交付,计划于2019年底进行发射,如图2所示.
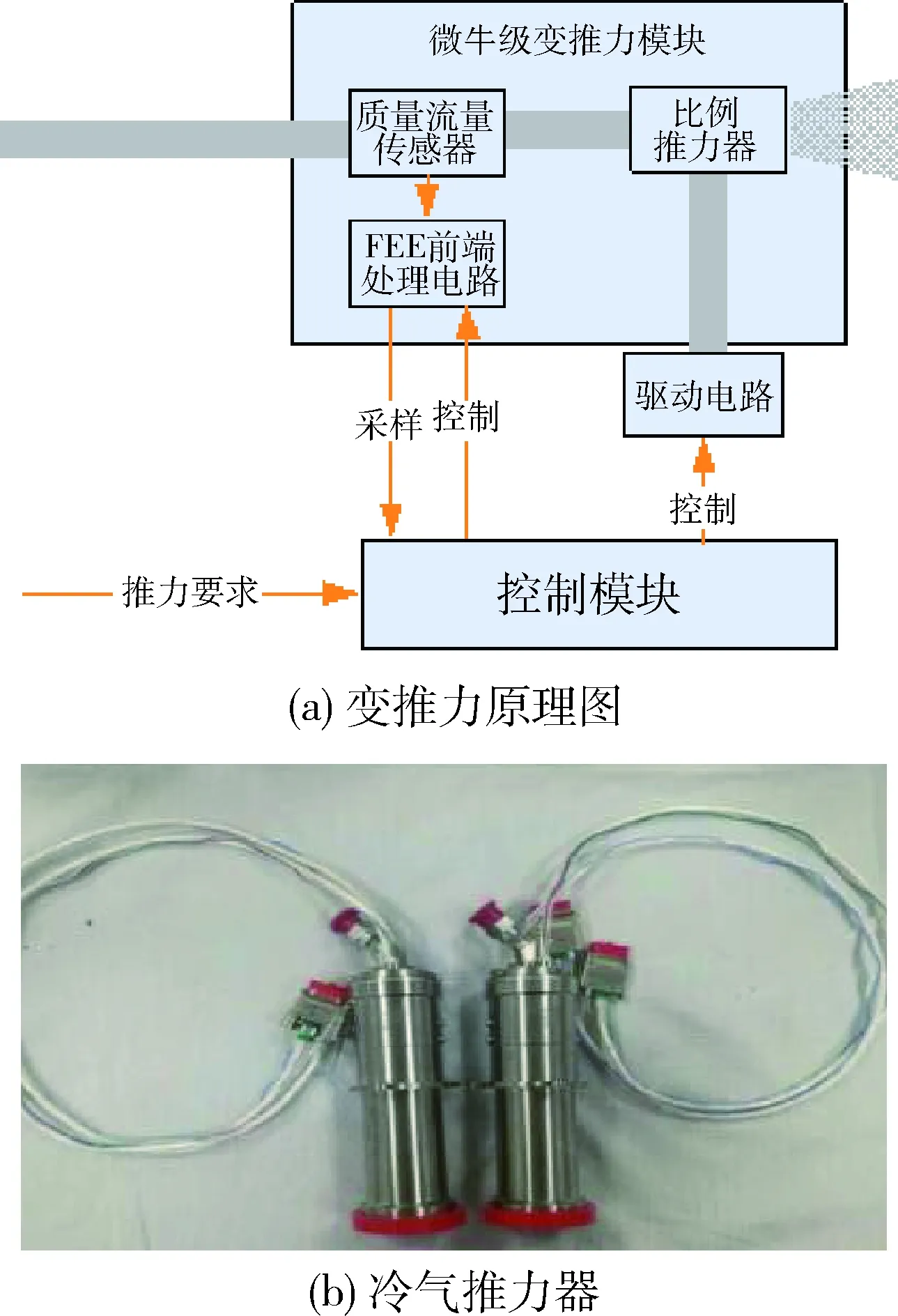
图2 冷气推进Fig.2 Cold gas propulsion
2.2 极小推力宽调节比电喷雾推进技术
电喷雾推力器属于静电加速推力器,能量消耗低,可产生微牛到百微牛量级连续可调的推力.90年代末,国外开始对电喷雾微推进技术进行深入研究,到目前已经达到实用化研究阶段.在美国空军实验室大学纳卫星计划、先进空间运输计划、NASA的GCD(Gaming Changing Development)计划和欧洲的FP7支持下,美国的斯坦福大学、麻省理工学院、美国Busek公司、伦敦大学Queen Mary、牛津大学、剑桥大学以及卢瑟福实验室等研究机构和公司都在积极从事电喷雾推进系统的研究.随着连续变推力的需求,电喷雾推力器发展出了连续可调推力电喷雾推进技术.
国际上开展连续可调电喷雾推进技术的最成熟的单位为美国Busek公司.Busek公司的连续可调推力电喷雾微推进系统[9]是在NASA JPL实验室的New Millennium Space Technology计划的支持下进行的,其研制是为了减小微型卫星的空间位置扰动,实现无拖曳飞行.可调推力电喷雾微推进系统的性能最初指标如下,推力器尺寸:9×5×5英寸,重量:2.5 kg(包括可以在最大推力状态工作3 000小时的推进剂),功率消耗:小于6 W(稳态工作时),推进剂:甲酰胺(电导率0.5 S/m),推力范围:20~190 μN,比冲:最大400 s.
随后Busek公司在其前期研究基础上,针对引力波探测LISA任务需求进行改进,并于2015年在LISA Pathfinder进行在轨验证.单个电喷雾推进模块有4个推力器头部、中和器、流量控制微阀、推进剂贮箱、PPU、DCIU及框架等组成,如图3所示.
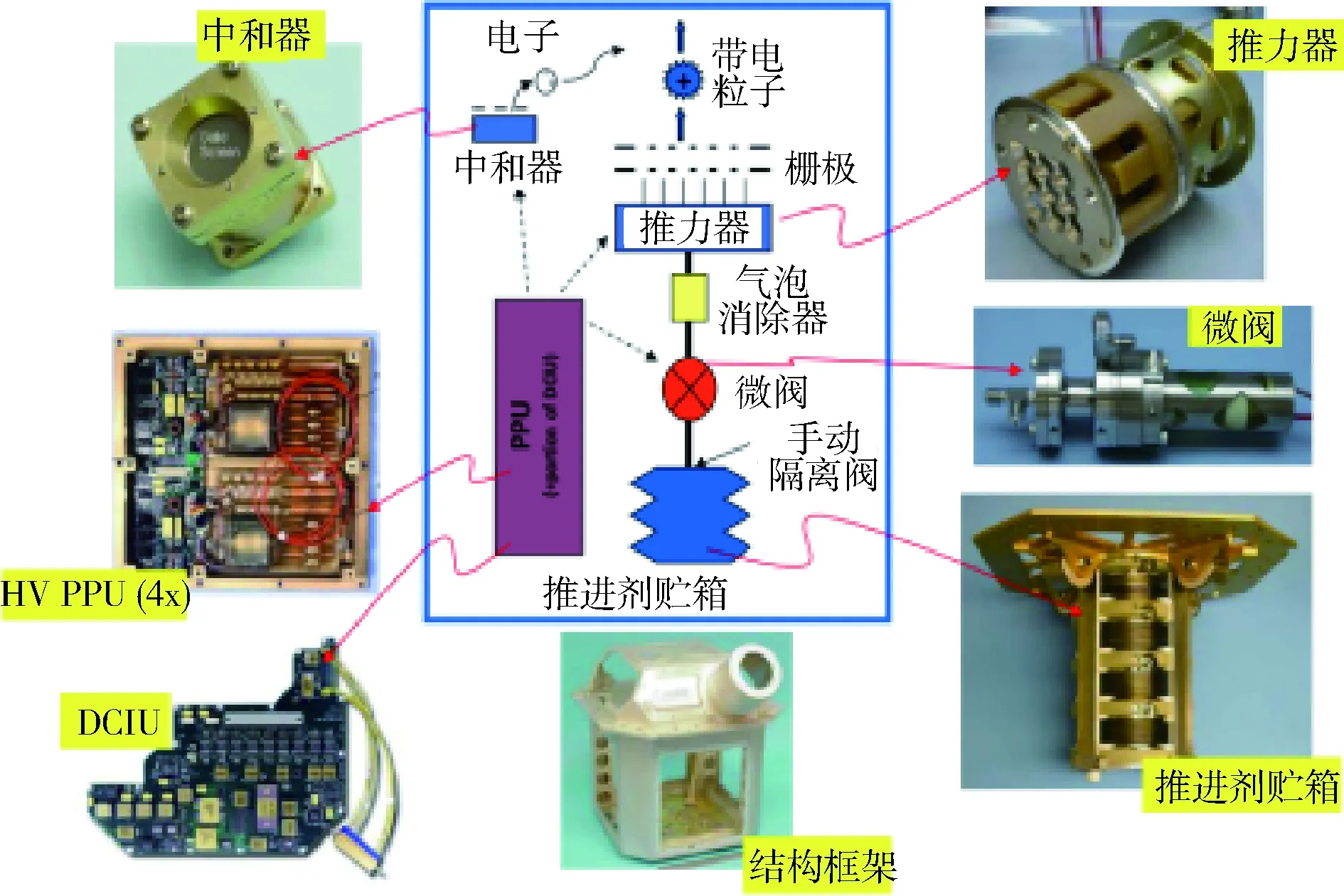
图3 Busek电喷雾推进系统组成Fig.3 Busek electrospray propulsion system
LISA Pathfinder卫星上共布置了两簇共8个推力器,其需求指标、地面测试指标及在轨测试指标见表2(其中推力器#1由于气泡原因,部分指标在轨未达到设计值).图4是LISA Pathfinder卫星Busek电喷雾推力器在轨验证数据,实现了微牛级连续可调推力,推力范围为5~30 μN,推力分辨率达到0.1 μN,推力噪声满足LISA卫星的应用需求.

图4 LISA Pathfinder卫星Busek电喷雾推力器在轨验证数据Fig.4 On orbit validation data of LISA PathfinderBusek electrospray thruster

表2 连续可调电喷雾推进指标实现情况Tab.2 Implementation of continuously adjustable electrospray propulsion indicators
国内相关技术研究虽然起步较晚,但现阶段开展相关研究的单位正在迅速增多. 国内方面的研究大都集中在恒定推力的电喷雾推进技术的研究[10-13].北京航空航天大学、中北大学、上海交通大学、北京理工大学、西北工业大学、中科院等单位均开展相关研究工作.同时,航天801所、航天502所、航天510所等航天单位也正在开展样机研制工作.航天206所在2019年实现了国内电喷雾推进技术的在轨验证.但从性能指标、产品可靠性等方面与国际上仍有较大差距.
2.3 极小推力宽调节比射频推进技术
在20世纪60年代德国吉森大学开始对射频离子推力器展开研究,目前吉森大学已开发出了多个型号的微牛级射频离子推力器和配套的推力器控制系统.其中始于上世纪60年代的小推力射频离子推力器RIT-4,放电频率为9 MHz,在实验中汞作为推进剂的情况下可引出束电流12 mA.
近些年,RIT-μX进入了工程研制,研制出性能优异的射频离子微推力器系列,如μNRIT-2(5~150 μN)、μNRIT-2.5(50~500 μN)、μNRIT-3.5(50~2 000 μN)、μNRIT-4(0.2~3.5 mN)等[14-15].其中可变比冲推力器μNRIT-3.5,推力范围为50~2 000 μN,比冲范围:500~3 700 s功率范围: 15~90 W, 总冲可达3.6 kNs.GFZ’s NGGM 就考虑使用μNRIT系列做无拖曳补偿及激光对准[16];ESA’s E-Motion计划也拟用μNRIT做无拖曳补偿[17];Astrium ST于2011年测试了Mini-RIT 微推进系统与LISA Pathfinder的匹配性能[18],推力分辨率优于0.1 μN,推力噪声接近于0.1 μN/Hz1/2,满足LISA Pathfinder要求[18-19].
近年来,英国南安普顿大学、美国Busek公司等单位陆续开展了小型射频离子推力器的研究工作.英国南安普顿大学在2011年针对高精度空间测量任务,研发了一组差分式射频离子推力器,利用双向推力相互抵消的方式,实现1~150 μN可调推力,推力分辨力为0.5 μN,推力噪声为0.5 μN/√Hz,但功耗偏大,比冲较低.近几年研制的μNRIT-3.5性能优异,其推力范围为45~2 500 μN,应用目标为下一代重力卫星无拖曳控制执行器[20-22];美国Busek公司也研制出一系列射频离子推力器,BIT-1、BIT-3、BIT-7等.其中2012年,Busek公司针对立方星的需求,BUSEK发展了BIT-1 1cm RF离子推力器,见图5.系统体积为1.25 U,质量为1.25 kg,功率为10 W,可以实现30~150 μN的连续可调推力,比冲为1 800 s,总冲量为1 220 N·s,分辨率达到0.1 μN,模拟寿命超过20 000 h.

图5 BUSEK-1cm 射频离子推力器Fig.5 BUSEK-1cm RF ion thruster
国内研发射频离子推力器的单位主要有中科院力学所、中科院微电子所[23]和兰州510 所[24]等有限的几家单位[23,25].中科院力学所在中科院空间科学预先研究项目的第一批、第三批的支持下,开展了应用于未来的地球重力场测量任务和“太极计划”的微牛级射频离子推力器研究,型号有μRIT-2、μRIT-2.5、μRIT-4,如图6所示,预期指标如表3所示[24-26].

图6 中科院微牛级射频离子推力器Fig.6 RF ion thruster designed by ChineseAcademy of Sciences
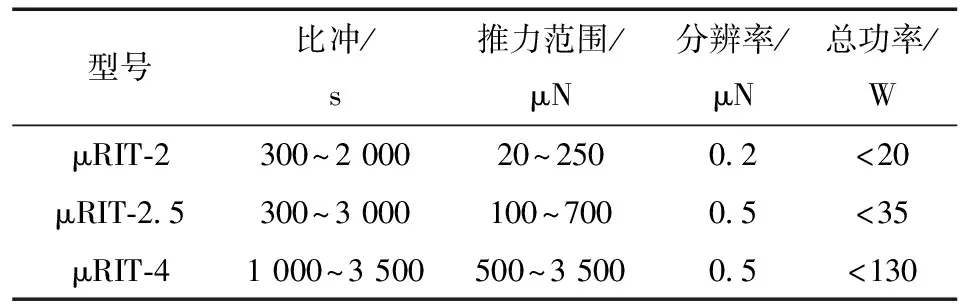
表3 中科院力学所射频离子推力器设计指标Tab.3 Design index of RF ion thruster of Chinese Academy of Sciences
目前,中科院力学所的μRIT-2.5已进行飞行验证,其标准推力范围为500~1 200 μN,功率60~100 W,屏栅电压0.6~2.0 kV,气体流量10~60 μg/s.在1 200 μN条件下比冲大于2 000 s,效率大于25%,系统干重5 kg[26].除此之外,中科院于2019年8月31日发射“太极一号”,实现激光干涉器、惯性传感器、无拖曳控制及微推进技术的关键技术在轨验证.RIT-1搭载中国航天科工快舟火箭发射的微重力技术试验卫星,其推力范围5~50 μN,分辨率优于0.5 μN,推力噪声优于0.2 μN/Hz1/2(10 mHz~1 Hz).在轨基本完成射频微推功能与性能测试,并用于卫星无拖曳控制试验,累计点火200余次,工作过程中无熄火现象,累计开展80多个工况实验,整机状态正常,遥测遥控数据正常,在轨测试推力范围优于4.5~60 μN,在轨惯性器件所测推力与推力器计算推力差异性小于5%,进行了4个推力同步点火,同步性良好.为了中和羽流离子,力学所同步研发了一款5~150 mA 连续可调的射频碳纳米管场发射中和器RPN-1.中和器在轨工作正常,电子束流透过率优于67%,电中性控制有效,预计寿命可达上万小时[27-28].
2.4 极小推力宽调节比多级会切场推进技术
多级会切场推进是一种基于强磁场约束的电磁式电推进技术,最早由德国泰雷兹于1998年提出.
此类推力器不仅具备长寿命性能优势[29-31],而且表现出宽范围连续可调节的能力.这种超大范围的连续调节能力是目前其它同尺寸电推力器所难以达到的.这一测量结果反映了推力器在超低功率领域的发展潜力.
2009年,美国斯坦福大学博士YOUNG研制了一种圆柱形小型化多级会切场推力器,Cylindrical cusped field thruster(简称CCFT)[32].其结构与HEMPT以及DCFT存在显著不同,出口磁极长度很短,典型镜比只有1.6,推力器的推力调节精度为0.1 mN,可在25 W到250 W的范围内稳定连续调节.
2011年,德国吉森大学的KELLER首次开展了微牛级HEMPT的研究工作,并对不同推力器通道材料进行了测试.采用陶瓷放电通道推力器的功率调节范围是66~242 W[33].
2015 年,在卫星姿态和轨道高精度控制的需求下,吉森大学和Astrium公司合作,对微牛级HEMPT的磁极数量、磁极结构等磁场参数进行优化[34],该推力器的推力调节范围是50~360 μN.在600 V电压下的推力50 μN,比冲230 s.在1 100 V电压下的推力360 μN,比冲860 s,如图7所示.
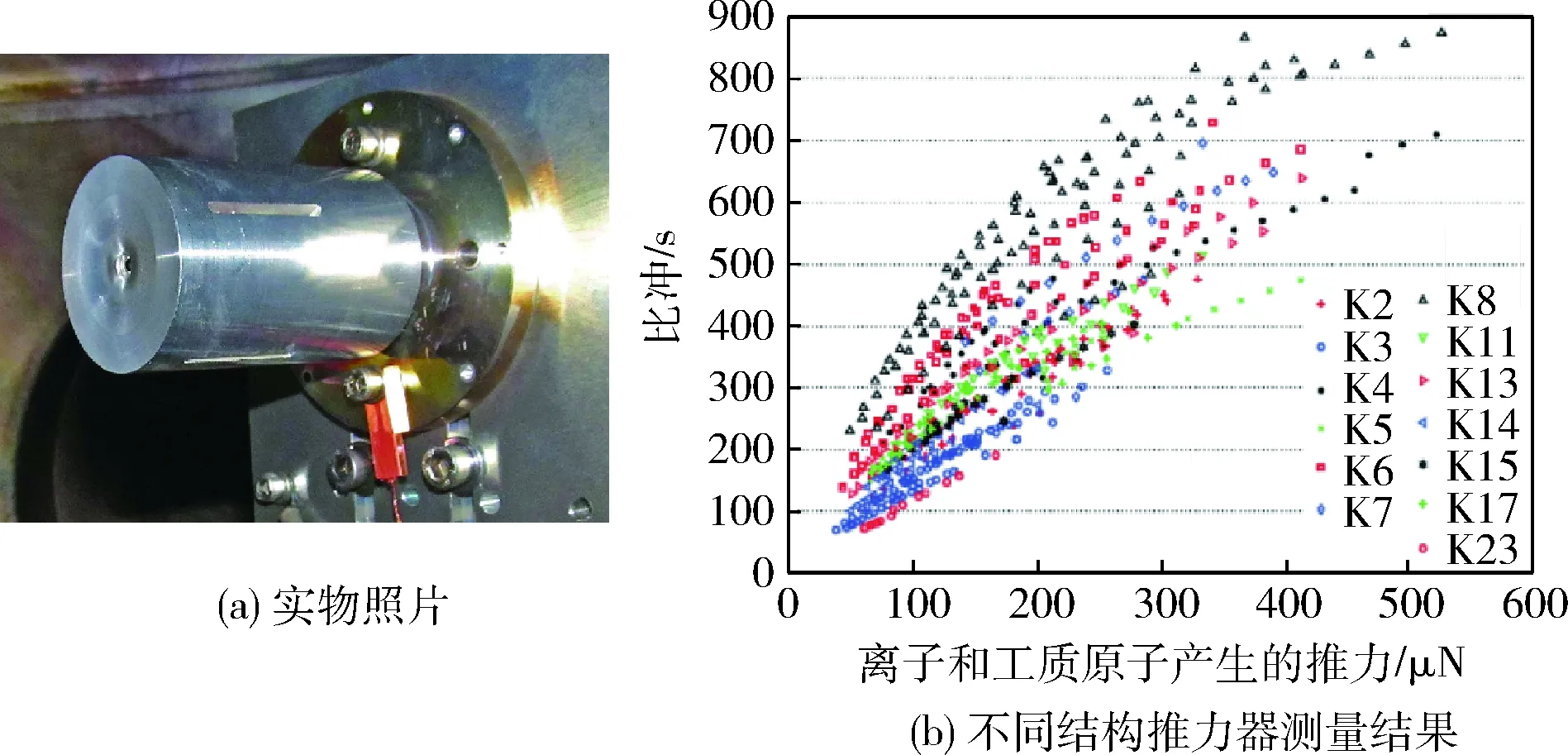
图7 HEMPT的结构优化Fig.7 Structure optimization of micro HEMPT
从2009年起, Airbus 公司就开始了小型化HEMPT的研究工作.2017 年,Max Vaupel 等人与德累斯顿工业大学合作,研制了面向微小卫星应用的新一代微牛级多级会切磁场推力器 Advanced Cusped Field Thruster(简称ACFT).该推力器的连续调节范围是0.4~10.2 mN,最高比冲超过 2 000 s,推功推比可降低到 18 W/mN.
在国内,哈尔滨工业大学研究团队从2016年启动了微牛级多级会切场推力器的研制工作, CFTK8的高能离子束流与轴线的夹角只有20°,明显低于德国基森大学的微牛级HEMPT[33],处于国际领先水平.该团队相继进行推力器无拖曳控制系统的应用研究[35-36].
2.5 小结
依据国内外调研,宽调节比极小推进技术的研究有以下特点和趋势:
(1) 冷气变推力技术已经在航天器上进行了应用,其应用型号最多,工作可靠性高,可实现跨越推力量级最大.冷气变推力系统将成为该类航天器的基本配置系统,因此冷气技术是后续的发展及优化提升的重点.变推力电推进系统由于比冲相对较高,但是推力影响因素较为复杂,等离子体形成过程不易控制,其推力输出范围相对较低.
(2) 基于流量或电流反馈、实时调节的技术是未来高精度控制航天器使用的主流技术之一,控制精度和分辨率的要求越来越高.基于冷气变推力技术最开始通过控制mN级冷气定推力推力器开启脉宽宽度来获得抵消力,此时仅能实现控制精度低;而通过加热控制推进剂流量的开环推力控制,则存在响应速度慢的问题;这些都不能满足高精度、无拖曳航天高精度、快响应的要求,因此需要发展基于闭环控制的变推力技术.

表4 典型变推力推进技术性能指标Tab.4 Specifications of the typical propulsion technology
3 关键技术分析
3.1 极小推力产生机制及高精度闭环控制技术
由于推力极小,极易受到推进剂流动特性、放电特性等影响,难以通过开环控制形成推力的高精度稳定输出,需要研究推力的精确模型以及闭环控制的方法,由于环境变化非突变过程,因此推力响应时间在百毫秒量级即可满足控制需求.2005年欧空局(ESA)为电推进系统开发的推进剂流量控制单元中便采用了PID控制器,根据反馈的流量,通过调节压力控制电推进系统中氙气流量,可提供0.02~30 mg/s氙气流量连续调节的能力.
欧空局的GAIA、LISA Pathfinder、Euclid和MicroScope等航天器上的冷气极小推力推进系统也采用了PID闭环控制系统,根据采集的输出流量,通过调节压电阀开度,形成了对流量的高精度调节,进而实现对推力的高精度控制,如图8所示.该冷气微推进系统由流量传感器、压电比例阀和PID控制器组成,工作介质为氮气,可以提供0~1 000 μN的推力,推力分辨率达0.1 μN[37].
此外,压电驱动的应用形式多种多样,易于实现驱动装置的轻量化、微型化.意大利莱昂纳多极小推力冷气推力器采用了压电驱动方式实现冷气推力的连续输出,实现了1~2 000 μg/s的连续输出,输出分辨率优于0.1 μg/s.Busek公司的电喷雾流量控制采用了压电驱动实现流量的精确控制.采用1 mW功率的流量控制实现相当于1 nA的等效精度,推力精度低于0.01 μN.

图8 GAIA、LISA Pathfinder航天器冷气微推进系统控制逻辑图Fig.8 Control logic diagram of Gaia and Lisa Pathfinderspacecraft air-conditioning micro propulsion system
LISA Pathfinder卫星上采用的Busek电喷雾变推力电推进系统通过采集电流,调节电压及流量形成闭环控制;采集推力器温度,调节加热器功率形成高精度温度控制的闭环控制;同时调节中和器工作参数,实现羽流中和.推力分辨率最高可达0.01 μN,推力噪声<0.1 μN/Hz1/2[2].
3.2 高精度流量驱动控制技术
高精度流量驱动控制方法包括多种驱动方式,比如记忆合金驱动、静电驱动、热气驱动、压电驱动等,压电驱动是利用压电元器件的逆压电效应,将电能转换为机械能,再经特定结构传递来实现控制调节流体.
由于基于压电驱动的阀具有绿色、低功耗、高精度、高分辨率、低电磁干扰及技术相对成熟等特点,在高精度流体控制领域有着广泛的应用前景,已成为微流体控制领域的首选方案.利用逆压电效应制成的微位移器,只需要控制外加电压,就可以容易的实现0.01 μm乃至更高的定位精度.

图9 莱昂纳多公司基于压电驱动的变推力冷气推力器Fig.9 LEONARDO cold gas thruster’s piezoelectric valve

图10 Busek电喷雾压电阀Fig.10 Busek electrospray piezoelectric valve
3.3 高精度流量测量技术
极小推力连续变推力电推进系统、高精度冷气推进系统中,采用流量传感器用于实时监测气体或液体流量,在推力的精确连续输出中发挥重要的作用.热式气体质量流量传感器利用传热学和流体力学理论,采用热平衡原理,建立热敏元件热量损失与流体流速、质量流量之间的函数关系,从而获得流体流速、流量.其中,采用基于微加工技术的MEMS热式流量传感器由于具有响应快、体积小、无活动部件的特点[38-40].
国外航天器上已经将MEMS热式流量传感器用于航天器推进系统和冷气无拖曳系统[35-36,41],图11为2006年ESA为GAIA,LISA,Darwin等开发的MEMS流量传感器,主要用于高精度流量测量和控制.它采用了双加热器结构以及热电堆制作的上下游测温传感器.图12为2007年TAS-I公司为电推进和冷气推进系统研制的MEMS流量传感器,它采用MEMS技术在硅基底上加工了一个加热器W和上下游的测温传感器T1和T2.

图11 GIGA卫星用的MEMS流量传感器Fig.11 MEMS flow sensor for GIGA satellite

图12 TAS-I公司为电推进和冷气推进开发的MEMS流量传感器Fig.12 MEMS flow sensor developed by TAS-I forelectric propulsion and air conditioning propulsion
3.4 高精度极小推力测试技术


图13 典型的测量系统Fig.13 Typical measurement system
来自法国、澳大利亚和英国的合作团队[54],研制了一种较特殊的双摆台架,两摆臂分别作为测量臂和参考臂,两摆臂安装光学反射镜构成F-P干涉腔,用于高精度测位移,该系统可实现0~3 mN的极高精度测量.法国研究的ONERA摆臂系统[62-67],如图14所示,研究人员通过在不同位置放置不同质量的标准重物,实现标定,通过高效抗混叠滤波器结合18 bit A/D采集卡降低数据噪声,最终实现最高精度0.1 μN,0~100 μN范围内稳态推力的精确测量,该系统在10-3~10 Hz范围内噪声小于1 μN/Hz1/2,10-2~1 Hz范围内噪声小于0.1 μN/Hz1/2.此外,部分研究人员利用PID控制实现摆的主动控制,或利用数理分析方法分析摆运动方程来抑制噪声、提高测力精度[56,76-78].

图14 ONERA悬臂摆和标定系统Fig.14 ONERA cantilever pendulum and calibration system
国内方面,北航汤海滨团队研发的全弹力测量系统,测量范围为0~200 mN[71].哈工大宁中喜和范金蕤团队设计的基于三线摆原理研制了毫牛级测力系统[72].装备指挥学院洪延姬团队[73]设计扭摆系统,冲量测量分辨率达2×10-8Ns.中科院力学所的康琦团队针对空间引力波研究需求,研发了扭摆式测力系统,使用静电梳位移传感器,并通过高精度天平标定,实测结果表明,该系统测力范围0~400 μN,分辨率达到0.1 μN,10 mH~1 Hz范围内噪声0.1 μN/Hz1/2.微推力测量技术是微推力器性能研究的关键技术,针对静态力测量问题主要的前沿工作是消除背景噪声和实现高精度的标定以及阻尼问题.针对扭摆系统如何保证摆臂平衡成为了微牛级以下推力测量的关键技术,而锤摆式测力系统在保证推力器方向和位置,以及悬臂震动问题和位移高精度测量方面需要较多的技术突破.
4 我国空间极小推力宽范围可调推进技术发展建议
4.1 空间极小推力宽范围可调推进技术需求迫切,应设立专项支持发展
空间极小推力宽范围可调推进技术是高精度控制航天器平台的关键技术之一,为国际空间推进领域发展的热点,是引力波探测、等效原理高精度空间科学探测任务以及高精度重力场测量、导航任务等得以实施的重要共性支撑技术,该技术对于该类任务是否能够顺利实施有着决定性影响.高精度控制、无拖曳控制对连续可调的极小推力提出了迫切需求,需要这种极小推力抵消极弱干扰.作为空间推进领域重点发展方向,国际上已有多家顶尖研究机构开展了极小推力推进技术相关应用研究,在Lisa先导星、Microscope等卫星上进行了验证,而我国处于刚刚起步阶段,但多项任务需求迫切,但是在宽范围极小推力产生机制及控制方法等方面缺乏理论方法及实现方法研究,为了实现跨越式发展,急需开展深入基础研究、专项技术研究以及应用演示研究等,建立基础研发条件,完成基础理论、基础材料、先进测量控制方法等关键问题攻关,形成装备,进行空间应用.
4.2 空间极小推力宽范围可调推进技术类型较多,确定发展布局
空间极小推力宽范围可调推进技术现阶段研究的技术类型较多,应围绕高精度微牛级极小推力、跨数量级推力调节及高可靠性等需求,开展典型潜力技术研究.冷气变推力技术已经在航天器上进行了应用,其应用型号最多,工作可靠性高,可实现跨越推力量级最大,其可用范围最广.变推力电推进系统由于比冲相对较高,能够节省更多燃料,但宽范围的等离子体控制过程较为复杂,电喷雾变推力推进技术、射频变推力推进技术、会切磁场变推力推进技术等具备高精度微牛实现的潜在能力.
4.3 空间极小推力宽范围可调推进技术难度高,应开展关键技术联合攻关
空间极小推力宽范围可调推进技术难度高,为极精密推进技术,涉及多学科交叉融合,同时支撑极小推力推进技术研发的微牛级推力等极小特征参数测量技术难度极高,需要开展高精密测量基础方法以及基础环境条件研究、建设.在重大任务需求的牵引下,联合工业部门、研究院所、高校等国内优势单位,形成产学研用联合创新平台,开展关键技术联合攻关,实现技术的跨越式创新提升,达到国际领先水平,为国家重大任务需求提供动力基础.工程应用能够有效促进技术发展,暴露基础问题,为了加快发展,通过重大航天任务的在轨应用,带动技术的发展,早日实现我国航天强国梦.
5 结束语
空间极小推力宽范围可调推进技术是高精度航天器的关键支撑技术.本文对国内外空间极小推力宽范围可调推进技术进行了分类综述,概括了其关键技术,总结了研究现状和发展趋势,对我国空间极小推力宽范围可调推进技术的发展进行了展望,指出了发展建议.
猜你喜欢
科学家(2022年3期)2022-04-11
北京航空航天大学学报(2021年7期)2021-08-13
空间控制技术与应用(2021年4期)2021-08-02
空间控制技术与应用(2021年1期)2021-04-25
军民两用技术与产品(2021年10期)2021-03-16
汽车工程(2021年12期)2021-03-08
中国空间科学技术(2020年4期)2020-12-01
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
