
基于欺骗噪声复合干扰的组网雷达对抗方法
2020-01-08 08:22罗震明
探测与控制学报 2019年6期
袁 天,罗震明,刘 晨,车 伟
(解放军75832部队,广东 广州 510515)
0 引言
组网雷达系统相比于单雷达系统具有预警时间更短、探测空域更广、精度更高、目标信息量更多等优势[1-4],在复杂的电子对抗环境中得到了广泛应用,对突防作战造成了严重威胁,对干扰实施的方法和样式提出了更为严峻的挑战,因此针对组网雷达的干扰方法也成为电子对抗研究领域的难点和热点。
近年来研究人员相继提出了单部干扰机实施多假目标航迹欺骗的干扰技术,以及控制飞行器编队实施的协同欺骗干扰技术[5-7],但干扰平台在实施工作过程中隐身效果差、易被发现且协同实现难度大,网内雷达容易分辨出虚假目标和实际干扰机,从而导致干扰失败。本文针对此问题,提出了多机协同主瓣欺骗干扰与噪声干扰相结合的复合干扰方法。
1 复合干扰原理
欺骗噪声复合干扰的主要原理是通过对网内所有雷达分别实施分布式噪声干扰,由于雷达自身具有的恒虚警技术[8]导致雷达检测门限提高,达到不能检测正常雷达回波的程度,使其不能探测到干扰机平台,但能检测到较强的虚假目标信号。在这种情况下可以用普通平台代替隐身平台,假目标干扰效果也会增强。
下面以两部雷达组网为例对此类干扰方法的工作原理进行说明,其干扰态势如图1所示。
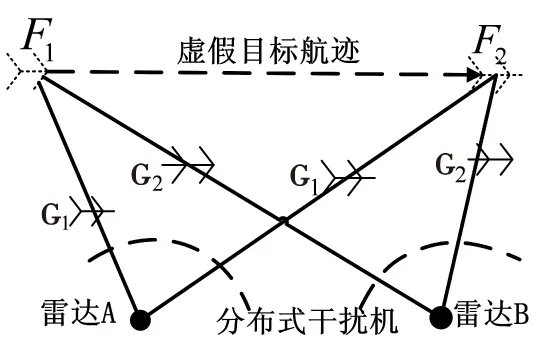
图1 干扰态势Fig.1 Jamming situation
图1中,A和B两部雷达进行组网,首先使用小型分布式干扰机群对网内所有雷达进行分布式噪声干扰,使其不能探测到干扰机平台G1与G2。而后两部干扰机针对各自对应雷达,按照协同主瓣欺骗干扰方法(下文分析介绍)对网内雷达进行欺骗干扰,最终实际形成的虚假目标航迹为F1F2。
2 复合干扰方法
在此分别对分布式噪声干扰和协同主瓣欺骗干扰的基本模型和方法思路进行分析介绍。
2.1 分布式噪声干扰模型
复合干扰首先是对网内雷达实施分布式噪声干扰,使其检测门限增大,下面对其检测门限和功率计算进行分析。
2.1.1 检测门限分析
根据雷达具有的恒虚警技术和检测性能相关知识[9],可知雷达检测门限Ut与虚警概率Pfa有如下关系:

(1)
由噪声干扰功率大小为信号方差,因此可以表示为:
σv2=Ut2/[2ln(1/Pfa)]
(2)
在此设进行检测时真实目标的雷达回波电压大小为Uh,所要模拟的假目标电压大小为Uf,不考虑传输链路损耗及各种信号处理增益,根据雷达不能检测正常回波但能检测到较强的虚假目标信号的原理,则二者与检测门限应当满足:
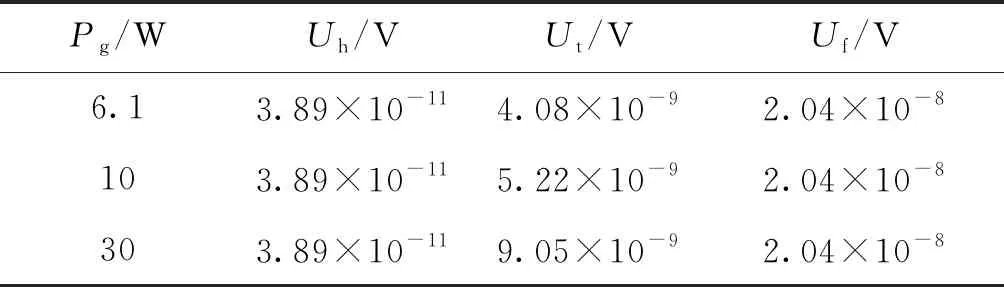
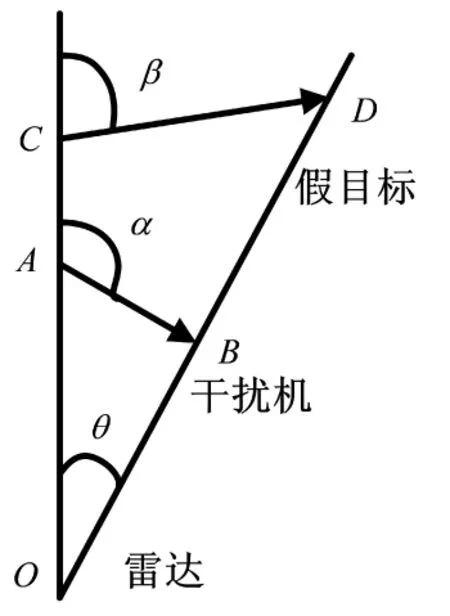
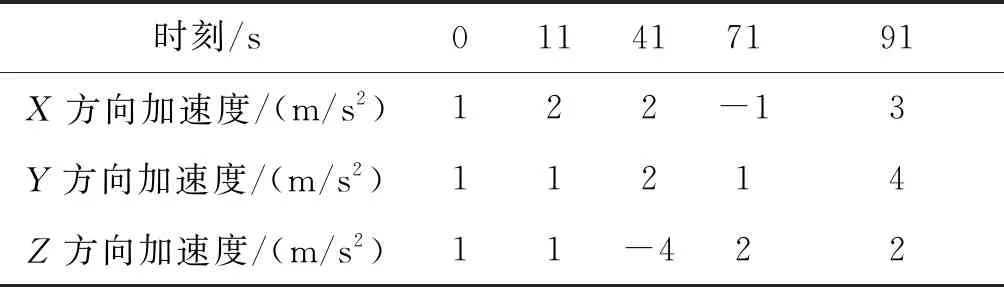
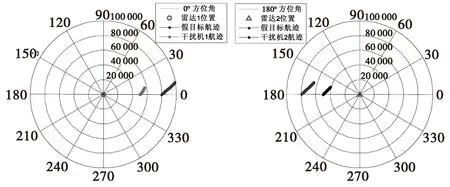
Uh (3) 此复合干扰尽量要求干扰机回波不能通过检测门限,因此令雷达检测门限大于真实目标回波电压和假目标回波电压的平均值,在此取二者平均值的1.5倍: (4) 根据信号电压与功率的关系[10]又有: (5) (6) 式中,Ph为真实目标的回波功率,Pf为欺骗干扰信号在雷达接收机输入端的信号功率。 2.1.2 干扰功率计算 假定雷达收发天线公用,欺骗干扰机和噪声干扰机均对其主瓣进行干扰,在此给定相关参数进行干扰功率的计算如下[11]: 1) 真实目标的雷达回波功率Ph (7) 式(7)中,Pt为雷达发射机功率,Gt、Gr分别为雷达发射、接收天线增益,σ为目标雷达反射截面积,λ为雷达信号波长,Rt为目标到雷达的距离,Ls为回波信号损耗系数。 令σ=5 m2,λ=3 cm,Rt=80 km,Pt=150 kW,Gt=Gr=30 dB,Ls=-10 dB,Bs=60 MHz。 计算可得Ph=-105.6 dBm。根据式(5)可得Uh=3.89×10-11V。 2) 欺骗干扰机的假目标信号功率Pf (8) 式(8)中,Pj为雷达发射机功率,Gj、Gr分别为干扰机发射增益、雷达接收增益,λ为雷达信号波长,γj为极化损耗系数,Lj为干扰信号损耗系数,Rj为目标到雷达的距离,Bs为雷达中放等效带宽,Bj为雷达中放等效带宽。 令Pj=30 W,Gj=1 dB,Gr=30 dB,λ=3 cm,Rj=30 km,Lj=-10 dB,γj=3 dB,Bj=200 MHz。 计算可得Pf=-78.4 dBm。根据式(6)可得Uj=2.04×10-8V。 3) 噪声干扰机干扰信号发射功率Pg (9) 式(9)中,Pg为雷达发射机功率,Gg、Gr分别为干扰机发射增益、雷达接收增益,λ为雷达信号波长,γg为极化损耗系数,Lg为干扰信号损耗系数,Rg为目标到雷达的距离,Bs为雷达中放等效带宽,Bg为雷达中放等效带宽。 在此功率下进行噪声干扰可以满足式(3),即雷达无法检测正常回波但能检测到较强的虚假目标信号。在此令真实目标回波功率和假目标回波功率不变,以列表形式给出不同干扰功率下部分检测门限的计算结果,如表1所示。 表1 检测门限计算结果Tab.1 Detection threshold computed result 根据结果可以发现,干扰功率在一定范围时计算得出的检测门限值,介于真实目标回波电压和假目标回波电压之间,满足复合干扰要求。当以更大功率对网内所有雷达均实施主瓣噪声干扰时,根据式(9)检测门限与干扰功率成正比可知,雷达的检测门限将相应增大(符合表1结果),从而无法检测到正常目标回波信号,但是对于欺骗干扰机发射的较强的假目标回波信号则可以检测识别。 协同欺骗干扰在单机航迹欺骗干扰基础上通过多部干扰机协同实施主瓣欺骗干扰达成。 2.2.1 单机航迹欺骗干扰模型 要成功实施主瓣航迹欺骗干扰,最主要的就是在适当的时机施放带有相应干扰参数调制的干扰信号,因此干扰参数的调制是主瓣航迹欺骗干扰能否成功有效的关键[12]。 以常用的LFM信号为例,假定雷达发射信号如下: (10) 设幅度、时延和多普勒频率的调制分别为k、Δt、fd,则干扰信号的表达形式为: (11) 2.2.1.1 幅度调制参数 假设干扰机与雷达的距离为Rj,假目标与雷达的距离为Rf,散射截面积为σ。因此可得干扰机截获的雷达信号功率为: (12) 雷达接收到的干扰信号功率为: (13) 式(13)中,K=k2,模拟假目标的回波功率为: (14) 因此式(13)与式(14)应当相等,则有: (15) 对式(15)进行化简可得: (16) 定义η=Rj/Rf表示干扰距离比,因此对式(16)化简为: (17) 对干扰实施方来说,干扰机接收天线增益Gj、假目标RCS以及雷达工作波长λ一般都是确定的,因此幅度调制参数主要取决于干扰距离比η。 2.2.1.2 时延调制参数 在此假定假目标位于雷达和干扰机连线之外,因此时延Δt为: (18) 给出雷达、干扰机和假目标的空间关系如图2所示。图2中,A和C表示当前干扰机和假目标位置,B和D表示下一次干扰机和假目标位置,在此设定各参数如下: OA=Rj0,OC=Rf0,OB=Rj1,OD=Rf1,CD=d,∠AOB=∠COD=θ (19) 由前文分析可知,在整个过程中首先得到的是假目标点迹的参数和当前时刻的干扰机位置,即Rj0、Rf0、Rf1和d是已知的,需要求解的就是下一次干扰时干扰机位置即Rj1。 图2 空间关系Fig.2 Spatial Relationship 在ΔCOD中,已知OC、OD和CD,则θ为: (20) 在ΔAOB中,已知OA、θ,在此假设α已知,则有∠OAB=π-α,通过正弦定理可以求得OB即Rj1为: (21) (22) 将其代入式(18)可得干扰信号的时间延迟为: (23) 从上述推导过程可以发现,在获得虚假目标航迹的基础上,通过递推可得到干扰机的运动特征参数和干扰机到雷达的距离。在获得相关参数后,只要在干扰过程中使得干扰机按此方式运动并释放干扰就能形成相应虚假航迹。 2.2.1.3 多普勒调制参数 设干扰过程中两次干扰之间的时间间隔为Δt0,实际情况中假目标可能会做匀变速运动,为方便计算,假定其匀速运动,则假目标和干扰机的运动速度为: (24) (25) 因此干扰信号的多普勒频率为: (26) 干扰机本身具有一定的速度,对多普勒频率有所影响,应当进行消除,因此多普勒调制参数为: (27) α=αmin+rand×(αmax-αmin) (28) 式(28)中rand函数表示随机选取0到1之间的数值。 2.2.2 协同欺骗干扰模型 在第2.2.1节单机航迹欺骗干扰的基础上,以多部干扰机对网内雷达分别进行航迹欺骗,且这些虚假航迹融合后为同一航迹。其主要思路就是针对网内某一基准雷达进行虚假航迹预设,而后通过航迹规划,对虚假航迹在不同雷达坐标系下进行空间对准和时间统一。 2.2.2.1 空间对准 空间对准在此主要解决预设航迹在不同雷达空间中的协同统一问题。主要思路为:①选取网内任意一部雷达作为预设虚假航迹的基准雷达,考虑雷达网的位置分布和虚假目标的运动学特征,在此基准雷达的坐标系内设计出符合实际飞行器运动情形的基准虚假航迹;②基准航迹转化到ECEF(地心地固)坐标系内,得到统一坐标系下的预设航迹,即为最终组网雷达识别到的航迹;③将统一坐标系下的基准预设航迹反变换到网内其他雷达相应的坐标系内,得到各部雷达在相应坐标系下的虚假航迹,最终多部雷达融合之后将得到空间高度相关的理想虚假航迹[13-14]。具体过程描述如下: 1) 基准雷达航迹预设 假设网内包含三部雷达分别为R1、R2和R3,以R1作为基准雷达。虚假航迹预设与3.1节相同,主要满足真实目标运动学规律。以R1位置的正东为x轴,正北为y轴,正上为z轴,建立东北天(ENU)坐标系,设k时刻基准虚假航迹共由N个虚假点迹组成,将其表示为: ZR1(k)=(xR1(k)yR1(k)zR1(k)) (29) 2) 基准航迹转换统一坐标系 (30) 下面将ENU坐标系内预设的基准航迹转化到ECEF坐标系内,即有: (31) 式(31)中, (32) 据此得到统一坐标系下的预设虚假航迹。 3) 统一坐标系航迹转换其余雷达坐标系 干扰机针对单部雷达是在其单个坐标系下进行干扰参数调制,因此需要将统一坐标系下的虚假航迹转换到其他雷达对应的坐标系下。 根据前文推导,可得R2雷达ENU坐标系内的基准航迹为: (33) 据此得到在ENU坐标系的基准航迹。 通过上述转换最终可以达到空间位置层面的协同,按照得出的各自坐标系下的基准虚假航迹进行主瓣航迹欺骗得到的雷达航迹不会被雷达网所剔除。 2.2.2.2 时间统一 要使多部干扰机协同对抗组网雷达,除了要使得各雷达坐标系下的预设航迹在统一坐标系下实现空间对准之外,还要保证各干扰机的启动时间以及施放干扰的时刻相统一,即干扰机运动的时间以及各欺骗点迹的时刻要达到统一,否则将被识别为虚假航迹,导致干扰失败。 针对干扰机启动这一问题,可在干扰机上安装GPS自动授时模块,依次对各干扰机进行统一授时,使得干扰机能够精确地在相同的时间启动并开始实施欺骗干扰,达到时间统一。 针对干扰信号施放时刻的统一问题,当确定各坐标系下的预设航迹后,根据单机航迹欺骗干扰施放时刻进行干扰,就可以达到欺骗点迹在同一时刻被雷达所识别,达到时间统一。 2.2.2.3 干扰实施流程 在前文所述的空间对准和时间统一的基础上,结合单机主瓣航迹欺骗干扰技术,在此提出多机协同欺骗干扰过程如图3所示。 图3 多机协同干扰流程Fig.3 Multi planes collaboration jamming process 具体实施步骤如下: 1) 干扰侦察:获得敌方网内所有雷达的先验信息; 2) 预设基准航迹:根据相关理论选择敌方基准雷达设计符合其一般运动学规律的基准虚假航迹,得出虚假航迹、点迹的各项参数; 3) 虚假航迹坐标转换:根据空间对准的原则,在预设基准雷达虚假航迹的基础上将其转换到统一坐标系而后将其转换到网内其余雷达坐标系下,进而得出各雷达系下的虚假航迹及其参数; 4) 干扰参数装订:在单机主瓣欺骗干扰方法和时间统一的基础上,按照参数推导方法,各自干扰机分别推导运动参数并进行装订; 5) 干扰具体实施:根据雷达工作周期确定各干扰信号的施放时间,各部干扰机在相应的时刻对接收到的雷达信号进行调制并面向各自对应的雷达施放出去。 为说明多机协同干扰特点,在此对两部干扰机欺骗两部雷达进行仿真实验。 在此设定虚假目标做匀变速运动,初始位置为(0,0,0),各方向初始速度均为100 m/s,其加速度情况如表2所示。 表2 虚假航迹加速度Tab.2 False track acceleration 设定雷达1距离假目标航迹起始点80 km,初始位置位于起始点180°方向,雷达2距离假目标航迹起始点80 km,初始位置位于起始点0°方向;干扰机1距离假目标航迹起始点50 km,方位角与雷达1相同,干扰机2距离假目标航迹起始点50 km,方位角与雷达2相同。按照前文所述干扰方法实施,结果如图4所示。 图4 两机协同航迹欺骗结果Fig.4 Two planes collaboration track deception result 观察图4可以看出,两部干扰机按照干扰流程分别对相应雷达进行航迹欺骗,在达到各自欺骗效果的基础上,由于设定的虚假航迹相同,因此两部雷达通过数据处理得出的假目标航迹的空间特性和运动特性应当是相同的,当其进行信息共享之后将判定识别为同一虚假航迹,从而达到对组网雷达的航迹欺骗干扰效果。 综上所述,该方法既可以达到保护干扰平台的效果,同时又可以保证欺骗信号能够被敌方雷达所识别,最终效果就是可以利用常规电子战平台实现协同欺骗干扰,即欺骗噪声复合干扰是可以实现的。 本文提出了多机协同主瓣欺骗干扰与噪声干扰相结合的复合干扰方法。该方法通过噪声干扰使组网雷达无法检测到干扰平台但能够检测到干扰信号,进而对其实施多机协同主瓣欺骗干扰形成虚假目标航迹,最终达到复合干扰目的。仿真实验结果表明,该方法具有实际可行性,可以有效保护干扰平台并实现预期干扰效果。通过研究分析复合干扰方法,不仅在理论上拓展了航迹欺骗干扰技术的研究方向和干扰效能,而且在实际军事对抗尤其是在掩护突防作战中具有非常重要的应用价值。
2.2 协同主瓣欺骗干扰模型

(k=1,2,…,N)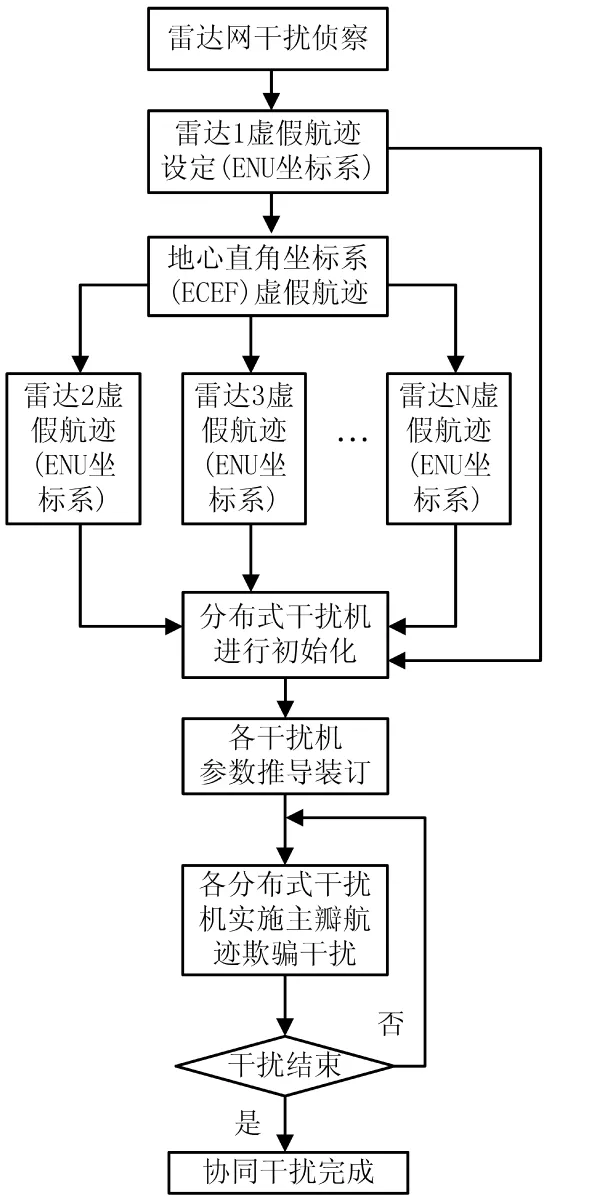
3 仿真实验验证
4 结论
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
汽车实用技术(2022年4期)2022-03-07
海军航空大学学报(2021年1期)2021-09-01
舰船电子工程(2020年3期)2020-06-11
兵器装备工程学报(2020年3期)2020-04-22
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
舰船电子工程(2020年1期)2020-03-03
航天电子对抗(2020年6期)2020-02-04
舰船电子对抗(2019年5期)2019-12-04
火力与指挥控制(2019年4期)2019-06-14
