无刷直流电机模糊PID控制
2020-01-07 01:09:46祝相泉黄海龙
辽宁工业大学学报(自然科学版) 2020年1期
祝相泉,黄海龙,田 昊
无刷直流电机模糊PID控制
祝相泉,黄海龙,田 昊
(辽宁工业大学 机械工程与自动化学院,辽宁 锦州 121001)
无刷直流电机(BLDCM)的控制系统用常规PID控制器算法来实现矫平机的定尺剪断,具有非线性,低精度和强干扰等有关问题,无法达到预期的速度系统控制,因此试验了一种模糊PID控制器算法的方式来实现。在对控制系统数学模型的基本分析中,当前BLDCM的电流闭环控制由常规的PI控制,而模糊PID的控制用来实现闭环的调速,建立了BLDCM的双闭环速度控制系统模型。仿真结果显示,达到的结果对其控制效果和动态特性的实现有较大的改善,为进一步的优化设计提供很好的思路。
无刷直流电机;调速系统;模糊PID控制;MATLAB
无刷直流电机在矫平机定尺剪断中要具有较好的效率,关键技术在于其速度控制,速度太高太低都会对生产和产品质量有影响,甚至无法正常工作。为了达到要求,本文用电子转向器(逆变器,转子位置的传感器)来代替常用的机械换向和电刷,使控制系统有良好的调节速度性能,但无刷直流电机的速度调节系统是一个较复杂的控制系统,具有多变量、非线性和耦合强等特性,常规的PID控制算法在动态系统中的要求难以满足[1]。表现在无刷直流电机在启动时超调现象不容易控制,为了得到较好的稳定性、响应速度和适应性,很多的著名学者将智能算法应用到调速系统中。其中最常见的方法是模糊控制,它具有实用性高、自适应能力强、便于实现等优点[2-9]。在对无刷直流电动机的分析中,结合常规的PID控制与模糊控制的技术优点,指出一种关于模糊PID控制器的算法,用MATLAB软件对双闭环的系统进行研究和仿真等操作。
1 建立调速系统模型
在双闭环速度系统中如图1所示,在转速环与电流环双闭环的构架中,模糊PID控制器算法用于转速环,而电流环使用的是常规PI控制器调节。通过PLC来改变PWM波形的占空比。与传统PID的控制是相似的,只是在转速环中多加了一个模糊推理化的过程,进而依据其转速情况来改变PID转速环节的系数。模糊PID控制的主要优点是:调速系统可以依据运行状态调整和校正PID控制参数,以达到系统的动态性要求[3-7]。
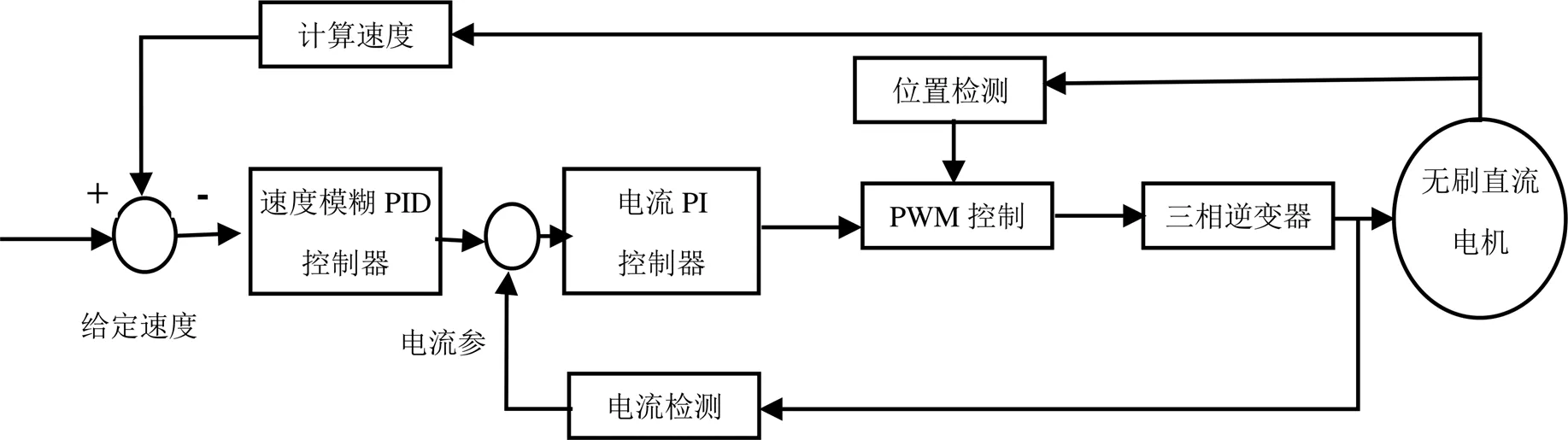
图1 双闭环调速系统
2 BLDCM模糊PID控制器的设计
2.1 模糊PID控制方案
在无刷直流电机速度控制中,如上文所述最后利用编程来改变占空比实现调速,控制器主要由PID的算法与模糊控制技术两个核心要素[4],其原理如图2所示。所得到的输出量(K、K、K),首先是在模糊控制器中对误差的变化率和误差进行计算,然后将其放入PID控制器中进行调节运算,最后将得到的一个控制总量结果送入相应的控制中进行下一步的操作。
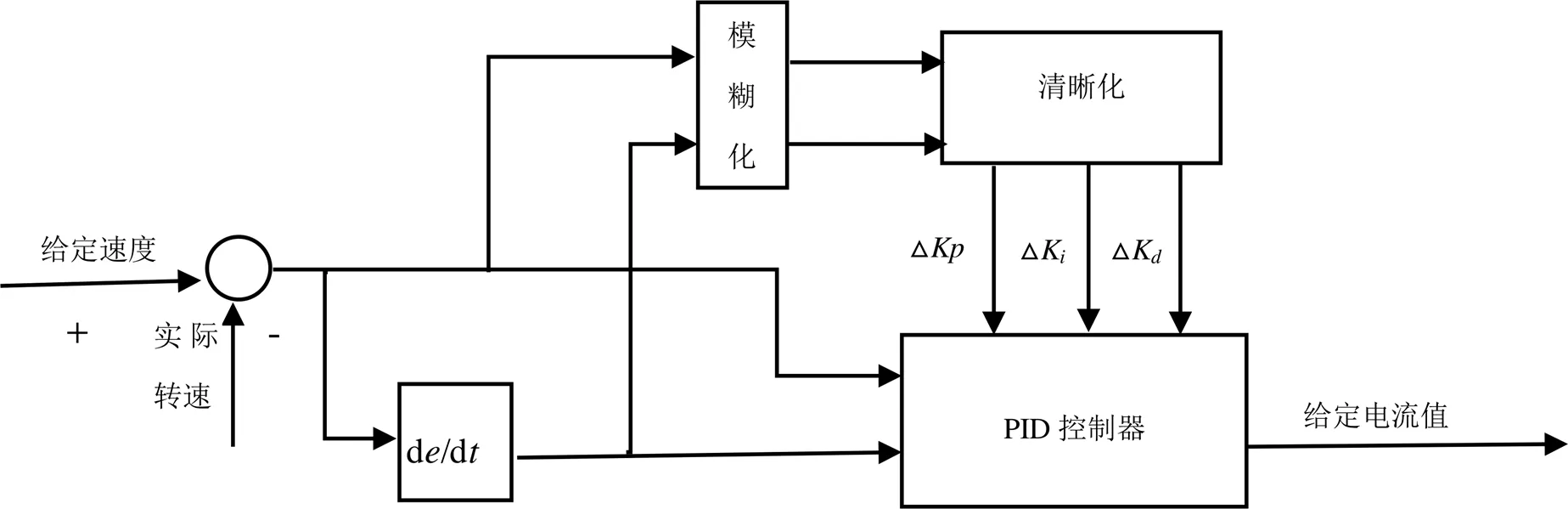
图2 模糊PID控制器结构图
2.2 模糊PID控制算法
在PID算法的控制器中K、K和K三个参数之间会时刻相互干扰,这也会影响参数的自整定精度,因为不同时刻发生的变化会对K、K和K的自整定也产生一定干预,这会使自整定的三个参数达到较好的结果。在以PID算法为基础的前提下对PID算法进行模糊自整定,计算所得的系统误差与误差变化率和模糊规则推理方法相结合,完成模糊矩阵参数整定的查询[4-8]。关于模糊PID控制器的参数算法,可表示为:

式中:K'、K'、K'为PID设定的三个参数初始值,ΔK、ΔK、ΔK为模糊控制器进行模糊推理之后整定出来的3个输出[4]。
2.3 模糊控制规则设计
在模糊控制调速系统中,隶属度函数与模糊控制规则是整个控制设计的重要内容,对其确定尤为重要。
以、和ΔK、ΔK、ΔK作为输入和输出,其论域:[-6, 6], 模糊子集:{NL、NM、NS、ZO、PS、PM、PL}。输入输出的隶属度函数分别为:高斯型与三角型隶属度函数(gaussmf,trimf),以Mamdani模糊系统为推理方法。由模糊控制算法知,模糊系统的控制规则输入(、)输出(ΔK、ΔK、ΔK)变量之间的关系以49个模糊规则用“If···and ···then ···”的形式给出如图3所示,建立Fis系统文件。
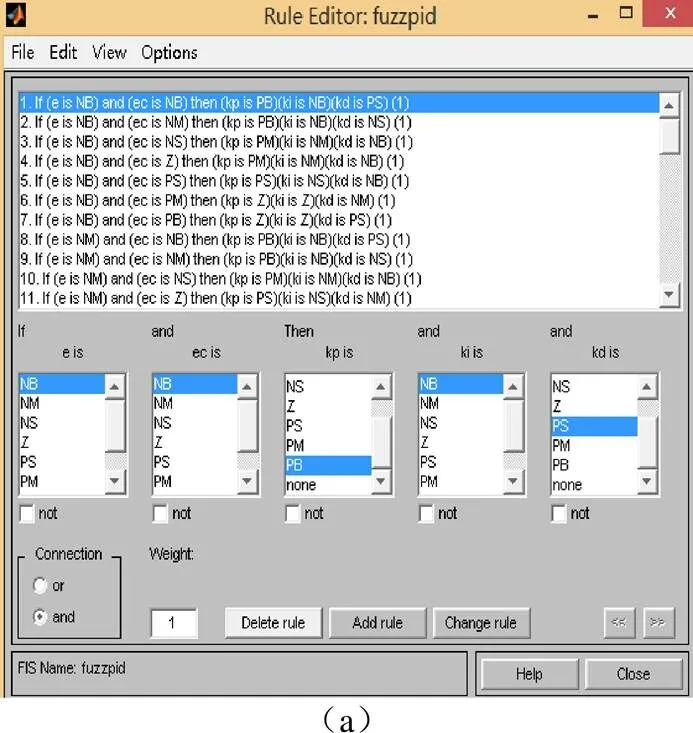
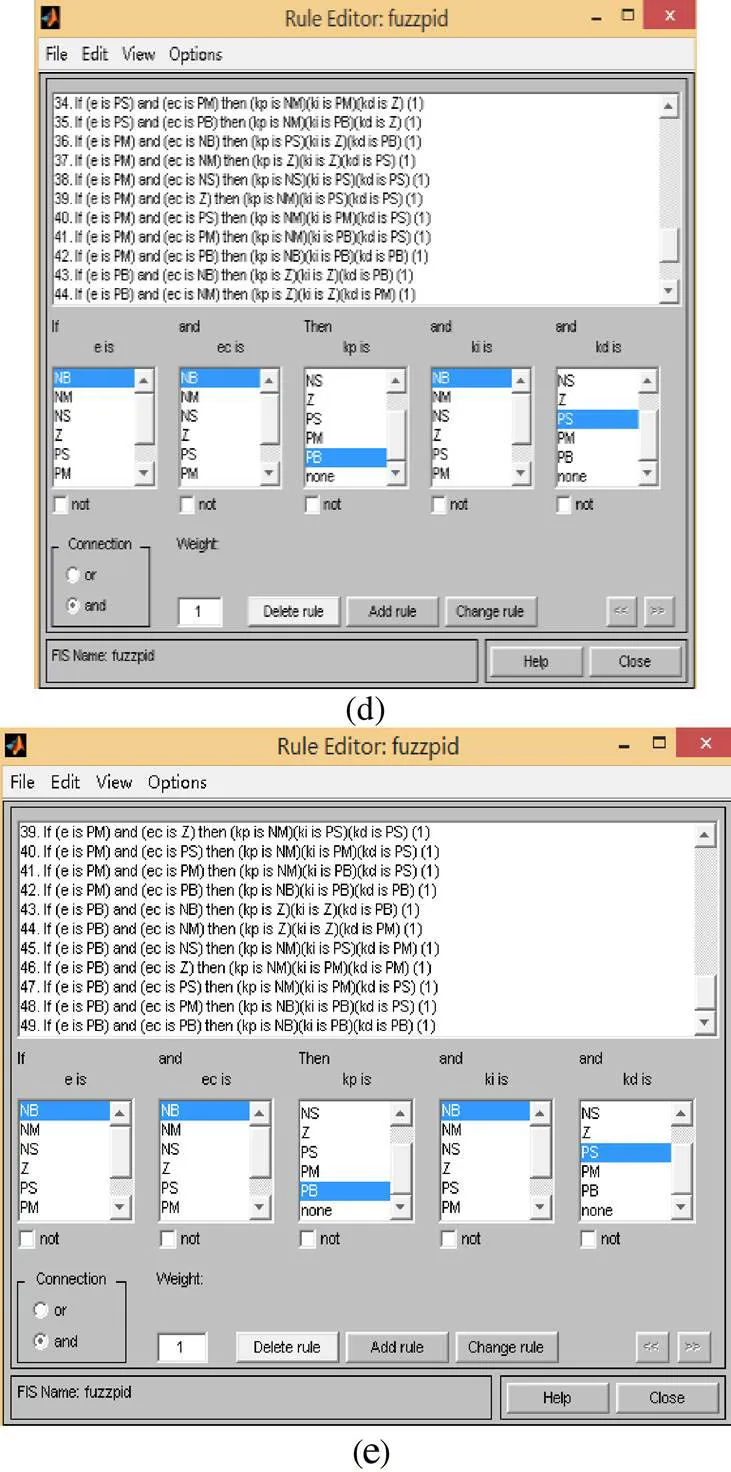
图3 输入输出的变量函数
2.4 无刷直流电机数学建模
以星形连接方式的BLDCM平衡方程式可表达为:

无刷直流电机电磁转矩可表达为:
式中:T为电磁转矩;—电机角速度。
在机械运动过程中BLDCM运动方程可表达为:
式中:为负载转矩;为阻尼系数;为转动惯量。
3 建模及仿真分析
在MATLAB/Simulink平台上,依靠直流调速控制系统的动态特性,对模糊PID控制器的初始值进行转速环仿真模型的建立[3],如图4所示。在模型中BLDCM的有关仿真参数值为:定子电阻和定子电感是0.52 Ω与21 mH,电机转动惯量=8.8×10-6kg·m2,极数=8,反电势=0.685 vs/rad,阻尼系数=4.21e-6Nms/rad,电压=12 V,额定转速=2500 r/min, 周期=0.006 ms。
在MATLAB软件环境中所得结果(模糊PID)与常规的PID控制器进行比较,如图5所示,在常规和模糊PID控制中稳定速度的时间分别维持在0.2 s和0.1 s左右。图中可以看出模糊PID转速曲线较常规PID转速曲线达到稳态转速所需时间更短,超调量几乎为零,抗干扰能力强,转速波动比较小等优点[6-7]。在额定转速下(1 000 r/min)空载启动时,负载在0.2 s和0.38 s时分别调至到0.3 N和0.02 N,在MATLAB环境中两种算法的对比结果曲线如图6所示。由此可见,在运动过程中无载荷启动时采取模糊PID控制,其超调量几乎不存在的,且调节所要的时间更短和速度响应变化的更加快;模糊PID控制器是一种对负载突然发生改变时具有一种较好的处理及时应变的能力,对周围产生的干扰阻碍有较强的处理能力。

图4 转速环模糊PID控制器仿真模型
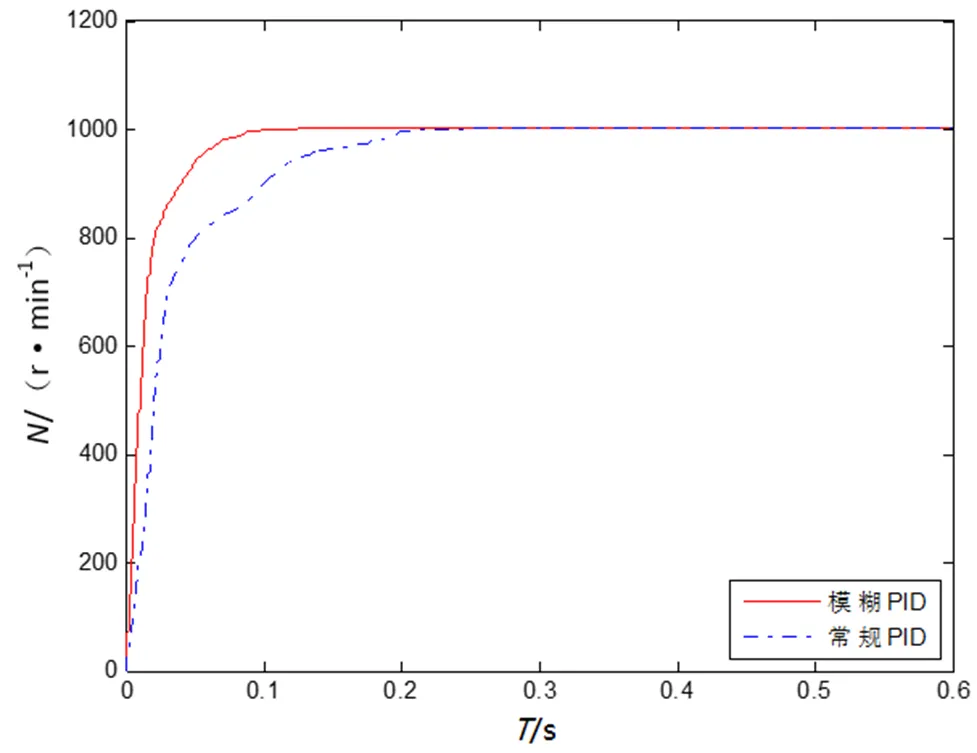
图5 模糊PID与常规PID仿真结果
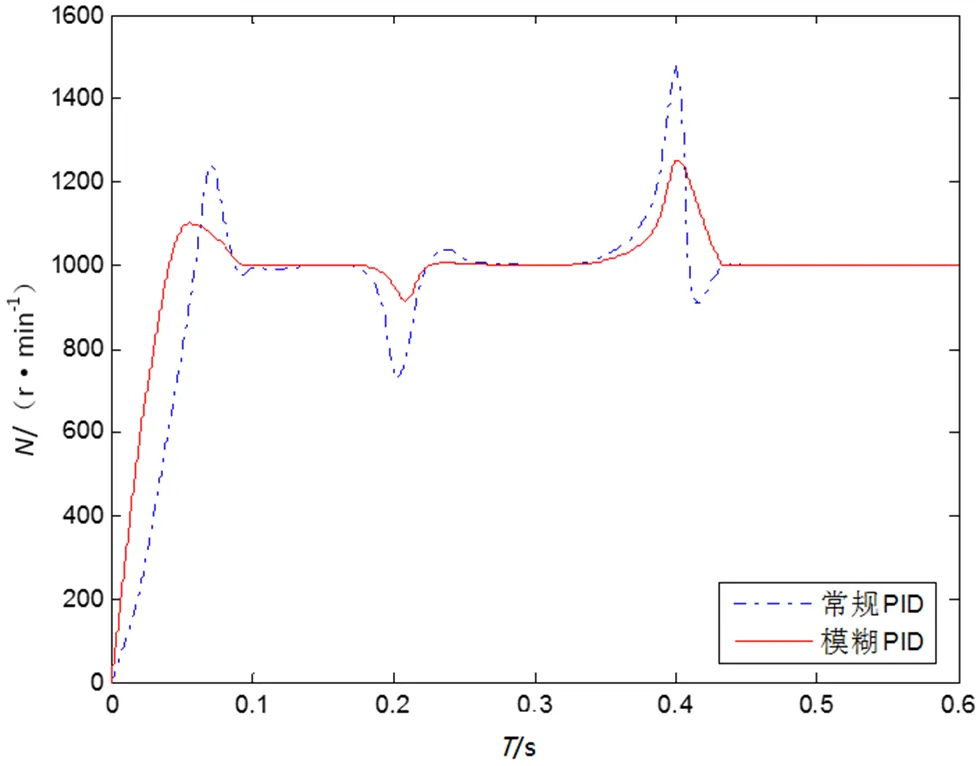
图6 负载变化后的转速对比曲线
4 结论
设计的这个控制器应用在矫平机中的BLDCM速度控制系统中,其表现出的稳定性,速度响应特性,抗干扰能力和滞后性的改变等特点,较常规PID控制器的表现更为突出,效果更为明显。在系统的模拟比较中,模糊PID控制算法在发生负载突变时可以更快地恢复,而且有小超调量,鲁棒性较强,速度快捷方便,控制效果实用性强。控制系统的稳定性和灵活性较高,可对模糊控制、PID参数进行相对应的修改可针对不同的控制对象,达到了设计目的与要求。
[1] 朱业鹏. PID控制器的参数整定及其稳定域研究[D]. 南京: 南京理工大学, 2007.
[2] 马跃. 永磁无刷直流电机驱动的电动压缩机控制研究[D]. 长春: 吉林大学, 2017.
[3] 纪志成, 沈艳霞, 姜建国. 基于Matlab无刷直流电机系统仿真建模的新方法[J].系统仿真学报, 2003(12): 1745-1749, 1758.
[4] 王朋朋. 基于模糊PID的烘干机温度控制系统的设计与实现[D]. 锦州: 辽宁工业大学, 2016
[5] 付子义, 邢阳. 无刷直流电机的变论域模糊自适应控制[J]. 计算机仿真, 2015, 32(5): 336-339.
[6] 刘金琨. 先进PID控制Matlab仿真[M]. 4版. 北京: 电子工业出版社, 2016: 299-301.
[7] 王晓远, 傅涛. 基于模糊RB神经网络的无刷直流电机控制[J]. 微电机, 2015, 48(11): 33-36.
[8] 丁少云, 薛达. 无刷直流电机的PID调速控制系统[J]. 变频器世界, 2019(2): 77-79, 114.
[9] Zhang WanJun, Zhang Feng, Zhang Jingxuan. Based on Brushless DC Motor of Fuzzy and PID Control System[J]. IOP Conference Series: Materials Science and Engineering, 2018, 452(4): 128-133.
Fuzzy PID Control of Brushless DC Motor
ZHU Xiang-quan, HUANG Hai-long, TIAN Hao
(College of Mechanical Engineering and Automation, Liaoning University of Technology, Jinzhou 121001, China)
The control system of brushless DC motor (BLDCM) uses the conventional PID controller algorithm to realize the fixed-length cutting of levelers. It has some problems such as non-linearity, low precision and strong disturbance ability. It can not achieve the desired speed system control. Therefore, we have experimented with a method of fuzzy PID controller algorithm to achieve the function. In the basic analysis of the mathematical model of the control system, the current closed-loop control of BLDCM is controlled by conventional PI, and the fuzzy-PID control is used to realize the closed-loop speed regulation. A double-closed-loop speed control system model of BLDCM is established. The simulation results show that the control effect and the realization of dynamic characteristics are greatly improved, which provides a good idea for further optimization design.
brushless DC motor; speed control system; fuzzy PID intelligent control; MATLAB
TH-39
A
1674-3261(2020)01-0022-04
10.15916/j.issn1674-3261.2020.01.005
2019-06-04
祝相泉(1994-),男,山东日照人,硕士生。
黄海龙(1982-),男,辽宁锦州人,讲师,博士。
优先出版地址:http://kns.cnki.net/kcms/detail/21.1567.T.20191227.1041.020.html
责任编校:刘亚兵
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
黑龙江电力(2017年1期)2017-05-17 04:25:05
电子制作(2017年1期)2017-05-17 03:54:12
环境科技(2016年5期)2016-11-10 02:42:12
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10