改进的帧间差分运动目标检测算法研究
2020-01-03 08:59陈媛蔡晓燕
现代计算机 2019年33期
陈媛,蔡晓燕
(武汉科技大学城市学院机电工程学部,武汉 430083)
0 引言
随着当今社会的快速发展,越来越多的高新技术应运而生,其中计算机视觉技术逐步受到人们的普遍关注,在国防科技、网络安全、视频监控等领域应用广泛,其相关应用领域的智能化程度也越来越高,节省了大量的人力和物力。智能视频监控系统是计算机视觉技术的一个重要研究热点,在安全防范、处理突发事件以及智能信息处理等方面具有举足轻重的作用。而运动目标检测技术是智能视频监控系统的核心技术,是实现视频监控智能化的关键,也是计算机视觉领域的重要基础研究之一,它为后续目标跟踪和行为分析等研究提供必要的基础,具有广阔的应用前景[1]。
运动目标检测可看成是前景目标和背景的划分问题,即从一系列视频图像序列中将运动目标从背景中检测出来。目前应用于运动目标检测的方法有很多,传统的运动目标检测方法有光流法、背景差法和帧间差法。光流法是依据图像各像素点的速度矢量特征来检测运动目标的方法[2],它对图像场景的先验信息没有要求,可适用于摄像机运动的情况下的目标检测。由于要对图像中每个像素点的速度矢量进行分析,所以光流法的计算量很大,实时性不理想。
背景差法需要建立背景模型,通过待测帧图像与背景图像之间做差分计算来提取运动目标。该方法操作简单,计算量小,但受外界光照条件、场景环境条件等因素的影响[3],需要不断更新背景模型,否则会降低检测的准确度。帧间差法与背景差法相似,是选取相连视频帧图像进行差分运算来检测运动目标,相连帧的选取可以是两帧、三帧或是多帧。该算法原理简单,计算量也不大,实时性好,但是容易出现检测出的目标物轮廓不完整,内部有“空洞”的现象[4]。
本文针对小区视频监控,在摄像机静止情况下,对监控画面进出小区的车辆进行检测研究,提出了一种基于最大模糊熵阈值化的三帧差分运动目标检测方法,在目标和背景区分的阈值选取上实现自适应选取,有效提高了算法的检测性能。
1 基本帧间差分算法
基本帧间差分算法的原理是采用连续两帧图像做差得到差分图像,然后通过选取合适的阈值来提取运动目标。基本帧间差分算法用公式表示如下:


式(1)中Ii(x,y)、Ii-1(x,y)为连续的两帧图像,Di(x,y)为帧间差分图像。选取合适的阈值T,对差分图像Di(x,y)进行二值化,如式(2)所示,Ri(x,y)为二值化后的结果。当差分图像的像素值大于或等于某阈值T,二值化结果为1,该像素位置判定为运动目标区域;差分图像的像素值小于某阈值T,二值化结果为0,则该像素位置判定为背景。由于基本帧间差分算法选取的是连续两帧图像作差,可能会出现在保留两帧图像相对变化区域的同时而忽略掉部分重叠的区域,使得目标轮廓不能精准检测出来,且目标内部会出现“空洞”;另外该算法检测出的运动目标会比实际目标大,会出现重影现象[5]。
2 三帧差分算法
三帧差分算法是根据基本的帧间差分法所做的改进,选取连续的三帧图像进行比较,其算法原理如下[6]。
选取视频图像序列中相连的三帧图像Ii-1(x,y),Ii(x,y),Ii+1(x,y),进行两两差值计算:

选择合适的阈值T对上述差分计算后得到的差分图像进行二值化处理:
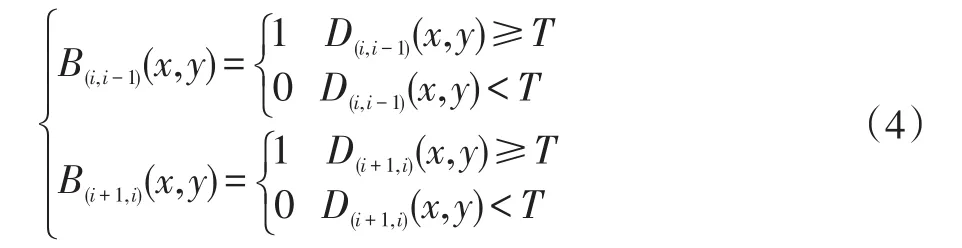
再将上述二值化后的差分图像逻辑“与”:

算法流程如图1所示。
采用三帧差分法可以在一定程度上克服两帧差分法检测运动目标出现的重影问题,但是仍旧无法避免检测出的运动目标轮廓不完整,内部有“空洞”问题。从算法原理可以看出,不管三帧差分法还是两帧差分法,在对差分图像进行二值化处理时,所选取的阈值是固定的,并不能灵活适应环境的变化。阈值的选取也是决定目标检测准确性的影响因素之一,自适应选取阈值可以进一步的提高目标检测的准确性。本文在阈值选取方面引入模糊集理论,通过建立差分图像的隶属函数,依据最大模糊熵准则,确定最佳分割阈值,提升运动目标的检测精度。
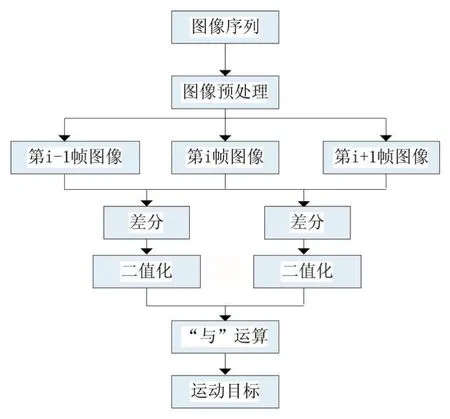
图1 三帧差分算法的流程图
3 改进的三帧差分算法
3. 1 模糊集定义
根据模糊集合理论,对于论域X上的模糊集合A,可以由隶属函数μA(x)来表示,0≤μA(x)≤1,μA(x)的值反映了X中的元素x对于A的隶属程度,即当μA(x)=1时,x完全属于 A;当μA(x)=0时,x完全不属于 A。μA(x)=1越接近于1,x属于于A的程度就越大。
本文对视频序列图像采用三帧差分法得到的差分图像进行模糊集定义。设差分图像X的灰度级数为L,大小为M×N,令xmn表示坐标(m,n)处像素点的灰度值。将差分图像划分成目标(target)模糊集和背景(backdrop)模糊集。这两个模糊集的隶属函数分别定义如下:
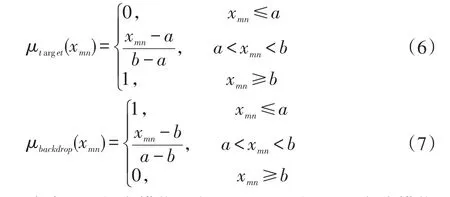
式中,[a,b]为模糊区间,[0,a]和[b,L-1]为非模糊区间。μtarget(xmn)表示(m,n)像素点属于目标的程度,μbackdrop(xmn)表示(m,n)像素点属于背景的程度,且
μtarget(xmn)+μbackdrop(xmn)=1。当xmn=(a+b)/2时,该灰度级的像素属于目标和背景的隶属度均为0.5,则可选xmn=(a+b)/2为分割阈值。灰度级小于(a+b)/2的像素属于背景区域,灰度级大于(a+b)/2的像素属于目标区域。
3. 2 最大模糊熵阈值分割
根据概率统计的知识,目标(target)模糊集发生的概率P(target)为:

背景(backdrop)模糊集发生的概率P(backdrop)为:

图像的模糊熵为:

由于P(target)+P(backdrop)=1,得:

由信息论知,当事件的熵越大时,则事件真实的可能性也越大。若图像的熵取最大值,则目标和背景的区分程度最佳。根据最大模糊熵原则,可得到最佳的模糊参数aopt和bopt,并进一步得到最佳分割阈值(aopt+bopt)/2。
3. 3 算法流程
改进后的三帧差分法采用最大模糊熵阈值,用差分后的图像像素值与最大模糊熵阈值进行比较,来判定运动目标和背景。算法流程图如图2。
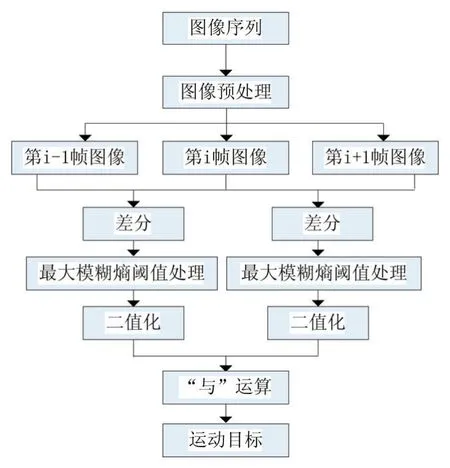
图2 改进三帧差分算法的流程图
4 实验结果与分析
本文的仿真实验是在Intel Core i5-5200 CPU,2.20 GHz,内存为 12GB,Microsoft Windows 7操作系统的PC上通过OpenCV软件完成。选取进出某小区的车辆行驶视频,视频帧尺寸大小为352×240,共150帧,连续选取三帧图像,如图3所示。采用传统三帧差分算法和本文改进的三帧差分算法所得的实验仿真结果如图4所示。
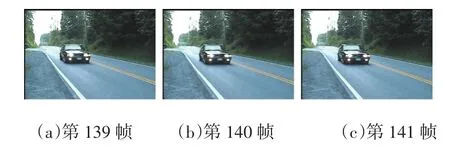
图3 连续选取的三帧图像
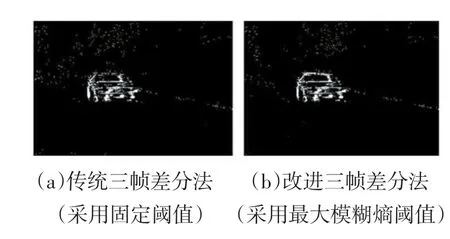
图4实验仿真结果
图4 (a)是采用固定阈值的传统三帧差分算法的二值化图像,图4(b)是采用最大模糊熵阈值的改进三帧差分算法的二值化图像。由图可知,采用固定阈值的三帧差分算法虽然能检测出运动目标,但是目标物的轮廓不完整,而且图像噪声明显。而本文所采用的基于最大模糊熵阈值的改进三帧差分法对于检测出的目标轮廓连续性得到改善,一定程度上消除了目标物内部“空洞”问题,图像噪声有所抑制,有效提高了检测的准确性,满足实时性要求。
5 结语
本文通过引入模糊集概念,在传统的三帧差分算法的阈值选取上采用最大模糊熵阈值对差分图像进行二值化处理,可以避免固定阈值不能灵活适应环境变化的缺点,弥补了传统三帧差分法检测运动目标出现内部“空洞”,轮廓不连续等不足,提高了算法的检测性能。
猜你喜欢
北华大学学报(自然科学版)(2022年4期)2022-08-17
上海师范大学学报·自然科学版(2022年3期)2022-07-11
重庆大学学报(2022年2期)2022-02-28
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
中央财经大学学报(2021年8期)2021-08-30
数学大世界(2021年4期)2021-03-30
扬州大学学报(自然科学版)(2021年6期)2021-02-14
智能计算机与应用(2020年4期)2020-08-31
火力与指挥控制(2020年7期)2020-08-22