基于多维振动响应信号分析的鸡蛋裂纹检测研究
2020-01-01 03:27李雅琪戴其俊盛建国
镇江高专学报 2019年4期
李雅琪,孙 力,陈 诚,戴其俊,盛建国
(1. 江苏科技大学 粮食学院,江苏 镇江 212003; 2. 江苏大学 机械工程学院,江苏 镇江 212013)
禽蛋含有丰富的营养成分且易于吸收,已成为日常首选的优质食品。据报道[1-2],禽蛋样本抽检中,禽蛋的活菌检出率约为10%,这些活菌加速了禽蛋的腐败变质,还会从蛋壳溢出污染其他禽蛋。裂纹禽蛋无法用于深加工。在禽蛋产、运、销过程中,采用快速检测设备和方法及时识别和处理禽蛋的裂纹和破壳现象对提高经济效益、降低疾病传播风险具有重要意义。
经检索,禽蛋蛋壳裂纹的无损检测研究主要包括机器视觉技术和敲击响应信号分析。
机器视觉技术具有简便、直观、信息量大等优点,已被广泛应用于各个领域。在禽蛋裂纹检测方面,视觉检测系统采集高亮背景光条件下的禽蛋透射图像,通过图像预处理、灰度值分析和特征参数提取,结合模式识别方法,对蛋壳裂纹进行识别,识别率超过90%[3-5]。
但裂纹具有自愈性,小裂纹特别是微裂纹的检测十分困难。众多学者提出,将禽蛋置于负压环境下,以扩大裂纹使其可视化效果更佳。Lawerence等[6-7]所设计的视觉系统可实现99.6%的裂纹检出率和0.3%的误检率;Li等[8]利用18 kPa的负压,结合机器视觉技术,实现了对微裂纹禽蛋的全检出,并可排除污渍的影响;Priyadumkol[9]通过优化特性选取,开发了对未清洗鸡蛋的裂纹具有高鲁棒性识别率的算法,识别率为94%,误判率为1.67%。负压环境提高了微裂纹识别率,但增加了检测系统的复杂性,难以满足禽蛋的高速自动化检测。
敲击响应信号分析是蛋壳裂纹检测的主要方法,由拾音器采集对蛋壳表面施加机械敲击所产生的声学信号,利用时频分析进行特征分析,提取特征参数,采用模式识别方法实现对蛋壳裂纹的识别。目前研究方向集中于模式识别方法,如支持向量机[10]、支持向量数据描述[11]、人工神经网络[12]、广义回归神经网络[13],蛋壳裂纹的检测精度高于90%,且可实现对微裂纹的检测,但因算法复杂而造成检测的实时性差。采用敲击响应信号分析的检测方法需要进行多次敲击,存在造成二次损伤的可能性。
本文提出“单点激励,多点响应”的方法,减少检测过程中的激励次数,增加信号相关性分析,拟设计基于多维振动响应信号分析的鸡蛋裂纹检测装置,采集与分析多维振动信号,提取与优化时域和频域内的特征参数,建立高效的线性判别模型,以实现蛋壳裂纹的检测。
1 材料与方法
1.1 实验装置
本研究设计的基于多维振动响应分析的鸡蛋裂纹检测试验装置如图1所示,主要包括多维加速度传感模块、瞬态冲击控制模块、信号采集与分析模块、传感器固定模块。

图1 蛋壳表面振动信号采集装置
瞬态冲击控制模块主要实现对鸡蛋蛋壳表面的瞬态冲击。DSP(TMS320F2812)与上位机通过RS232串口连接,根据需求在上位机程序设置运动控制参数,并由DSP发出固定脉冲至步进电机驱动器(SDG4),由步进电机(57HS54—2803)带动同步带线性模组(CCM W40)进行向下的冲击运动,敲击棒在同步带的带动下实现对鸡蛋的冲击,以产生检测过程中的冲击激励。本研究中,瞬态冲击速度设置为0.3 m/s,并采用尼龙材质作为与蛋壳接触的激励头。
信号采集与分析模块由压电石英晶体加速度传感器(YD-1)、电荷放大器(DHF-7)、信号采集卡(USB-1208FS)组成。加速度传感器用来获取敲击棒对鸡蛋冲击后蛋壳表面的加速度。电荷放大器主要对响应信号进行调理,转换至电压信号。采用LabVIEW编写的上位机软件通过调用采集卡动态库函数,实时获取传感器输出信号,并进行显示与保存。
传感器固定模块的设计中,根据鸡蛋受激励后蛋壳动力学有限元分析结果[14],将加速度传感器分布于大头、小头和赤道位置,如图2所示。试验中,加速度传感器采用硬铝支架与燕尾槽滑台固定,被测鸡蛋放置于固定底座,并保证传感器与蛋壳表面紧密贴合。
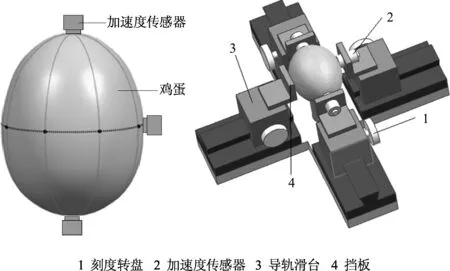
图2 传感器布局结构示意图
1.2 实验材料
本研究采用的鸡蛋购买于镇江东郊农场,均为产后1~2 d的褐色蛋,样本数为120。经测量,样本鸡蛋长轴、短轴尺寸范围分别为[55 mm,58 mm]和[42 mm,45 mm]。实验前,简单擦拭鸡蛋表面,进行个体编号,并在蛋壳表面进行4等分标记,记作#1—#4。在完好鸡蛋响应信号采集实验后,以硬物敲击的方式在蛋壳表面制造微裂纹,其中裂纹在赤道和大头位置的样本数为50,小头位置的样本数为20。
实验中,为获取较稳定的响应信号[15-16],选择以鸡蛋正上方赤道位置为瞬态敲击点,对每枚鸡蛋进行4次敲击,即#1—#4分别敲击1次。数据处理中,将鸡蛋分为训练集和预测集,其中训练集样本数为160(完好鸡蛋和裂纹鸡蛋均为80枚),用于建立鸡蛋蛋壳裂纹判别模型;预测集样本数为80(完好鸡蛋和裂纹鸡蛋均为40枚),用于验证所建立判别模型的识别效果。
2 信号的采集与分析
2.1 响应信号分析
本研究中,采用三通道同步采样方式采集振动信号,采样频率为20 kHz,并采用短时能量法确定信号的起始位置,使用有限元分析方法检测振动信号传播的仿真结果,以起始位置为基准的512点振动信号作为蛋壳裂纹识别的有效信号,典型振动信号时域波形如图3—图6所示。完好鸡蛋表面振动响应信号具有一致性,裂纹鸡蛋表面振动响应信号与蛋壳裂纹、传感器、激励点的相对位置密切相关。当裂纹位置靠近激励点(图3)或传感器(图4)时,完好鸡蛋与裂纹鸡蛋的表面振动响应信号具有较大差异;当裂纹位置远离激励点(图5)或传感器(图6)时,完好鸡蛋与裂纹鸡蛋的表面振动响应信号的差异减小。
因此,瞬态冲击作用于完好鸡蛋表面后,3个传感器所采集的响应信号具有高相关性;瞬态冲击作用于裂纹鸡蛋时,3个传感器所采集的响应信号有较大的差异,且与完好鸡蛋有区分性。
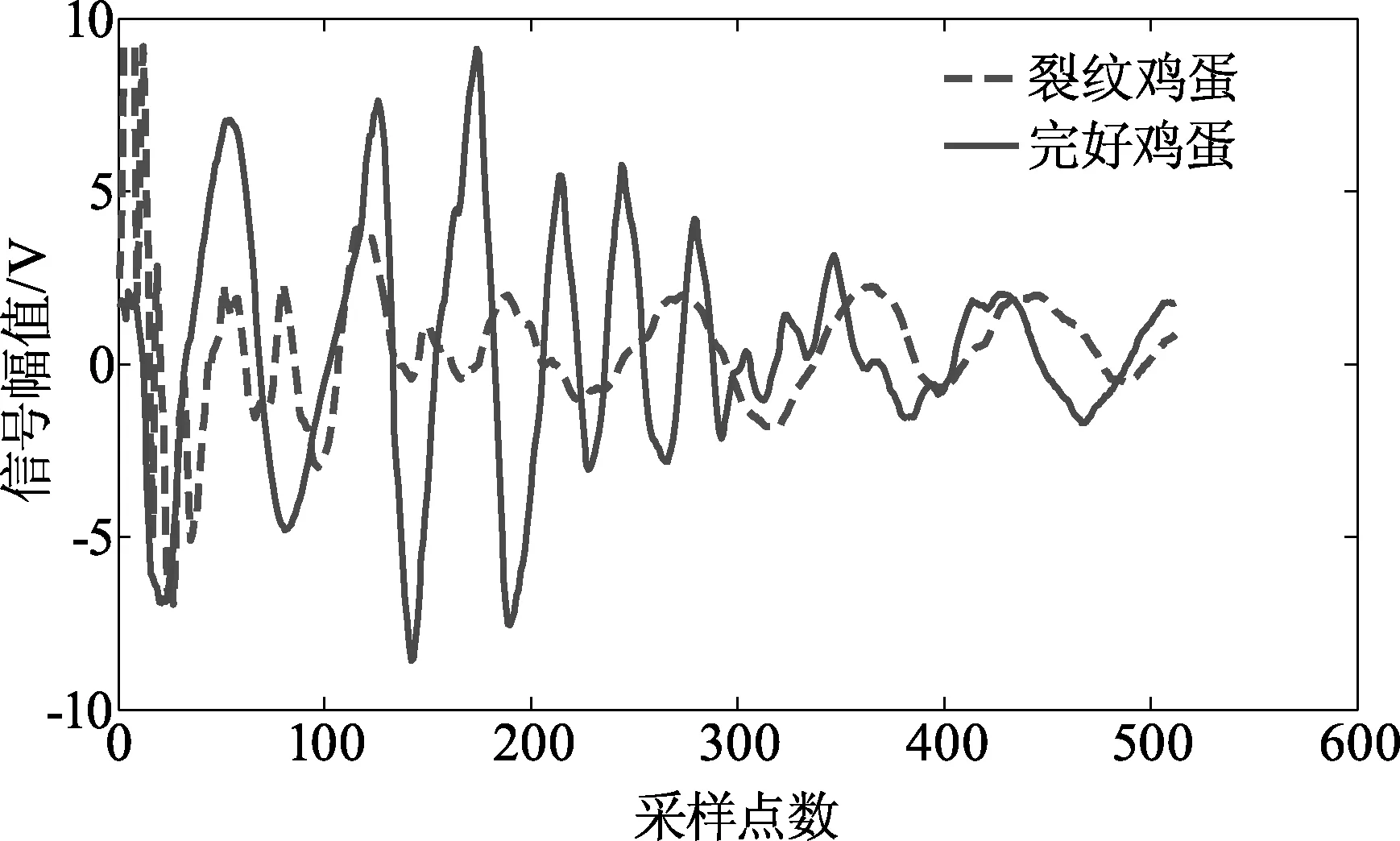
图3 完好鸡蛋与裂纹鸡蛋赤道位置(#1敲击点)典型振动信号时域波形

图4 完好鸡蛋与裂纹鸡蛋赤道位置(#2敲击点)典型振动信号时域波形

图5 完好鸡蛋与裂纹鸡蛋赤道位置(#3敲击点)典型振动信号时域波形

图6 完好鸡蛋与裂纹鸡蛋赤道位置(#4敲击点)典型振动信号时域波形
2.2 特征参数的提取
根据上述完好鸡蛋和裂纹鸡蛋响应信号在时域方面的差异性及三通道信号的关联性,从信号的时域特征、频域特征、信号相关性入手,提取9个用于区分完好鸡蛋与裂纹鸡蛋的特征参数,具体参数及物理意义如表1所示。

表1 完好鸡蛋与裂纹鸡蛋响应信号的特征参数
表1所列特征参数均是通过观察响应信号的波形提取的,两类鸡蛋蛋壳的区分度、敏感程度均有差异。为了提高特征参数对蛋壳裂纹检测识别模型的准确率和鲁棒性,本研究拟采用区分指数DI评价特征参数辨别两种状态的能力[17],需要剔除对区分两类鸡蛋贡献率比较低的特征值,减少冗余信号。当特征参数的DI得分小于0.85时,则认为该特征对蛋壳裂纹情况分类贡献率较小,并从原始特征中剔除。通过计算,特征参数x1,x2,x3,x6,x8,x9被保留,用于后续鸡蛋裂纹判别模型的输入。计算所得区分指数
(1)
式(1)中,μ1和μ2分别表示完好鸡蛋和裂纹鸡蛋的待评价特征参数均值,σ1和σ2分别表示完好鸡蛋和裂纹鸡蛋的待评价特征参数标准差。
3 结果与分析
为研究蛋壳裂纹、激励点、传感器相对位置对蛋壳裂纹检测的影响,本研究4个激励点作用下传感器信号均建立了完好鸡蛋与裂纹鸡蛋的线性判别模型,训练集回判正确率与预测集的判别率结果如表2所示。

表2 线性判别模型对样本的判别结果 %
由表2可知,采用多维振动响应分析的方法,4个不同激励点条件下对蛋壳裂纹敏感部位的识别率大多高于90%,只有激励点在#4号时,大头位置传感器预测集的识别率为86.25%。
1) 相对于大头位置和小头位置,该方法对赤道位置的判别率相对较高。可能是赤道位置距离激励点较近,且蛋壳结构和厚度较为均匀,蛋壳表面振动波传播比较稳定,当蛋壳出现裂纹时,蛋壳振动对赤道位置传感器的影响相对较大。
2) 裂纹处于激励点或传感器检测位置时,判别模型的识别率较高。其原因在于,裂纹会导致局部刚度下降,对振动波信号的影响最直接,即对蛋壳裂纹振动响应的保真性最高。
4 结束语
设计的具有瞬态冲击作用与多维加速度信号同步响应的鸡蛋蛋壳裂纹检测试验装置可实现“单点激励,多点响应”的表面振动响应信号采集。分析蛋壳表面振动响应信号,提取特征参数,筛选对裂纹识别贡献率高的6个特征参数,建立线性判别模型,可满足蛋壳裂纹识别。与常规声学特性检测方法相比,本方法能有效减少敲击次数,且具有较高识别率。
猜你喜欢
空间科学学报(2020年1期)2021-01-14
湖南饲料(2019年5期)2019-10-15
中国交通信息化(2019年12期)2019-08-13
中国听力语言康复科学杂志(2019年3期)2019-06-24
听力学及言语疾病杂志(2019年3期)2019-05-24
中国交通信息化(2018年3期)2018-06-13
新农业(2018年6期)2018-04-18
制造技术与机床(2017年11期)2017-12-18
中国交通信息化(2017年8期)2017-06-06
中国交通信息化(2016年2期)2016-06-06