
基于人工势场的无人机航路规划研究∗
2019-12-26 11:32孙越林
舰船电子工程 2019年12期
孙越林 吕 荧
(1中国人民解放军92942部队 北京 100161)(2海军装备部驻广州地区军事代表局 广州 510000)
1 引言
无人驾驶飞机UAV(Unmanned Aerial Vehicle),简称无人机,最早出现于二十世纪初,是一种技术密集、构造复杂的无人驾驶飞行器,同时具备自动升降、自动飞行、快速定位等多种功能,尤其适合代替人在危险、恶劣和极限环境下完成特定的工作和任务。因此无人机在军事、航空航天、测绘以及商业等领域有着广泛的应用[1~2]。
无人机航路规划作为无人机的关键技术,是无人机实现自主控制飞行的关键因素,是完成复杂任务、实现安全飞行的重要保证。在实际应用中,由于飞行环境复杂、约束条件多,因此建立良好的规划环境模型和采取高效的规划算法成为无人飞行器航路规划的关键问题[3~5]。本文重点研究了基于人工势场的无人机航路规划问题,为无人机在部队训练、装备测试评估等方面提供技术支持。
2 人工势场原理综述
人工势场的基本思想是[6~7]:通过人为构造目标位置的引力势场与障碍物的斥力势场叠加形成全局势场环境,智能体通过搜索势函数减小的方向(即智能体受合外力方向)寻找无碰撞方向,从而进行实时路径规划。人工势场法具体实现方法为[8~9]:首先在无人机运行环境空间中构建一个人工虚拟势场,该势场由两部分组成,一是由目标点对无人机产生的引力场,方向由无人机指向目标点;二是由障碍物对无人机产生的斥力场,方向由障碍物指向无人机。运行空间的总势场由斥力场和引力场共同叠加作用,通过引力和斥力的合力来控制无人机的移动。在多架无人机从多个目标起始点到达多个目标终点的航路规划中,斥力也存在于无人机之间,这主要是为了防止无人机相撞。


图1 人工势场受力图
人工势场的基本方法是梯度下降搜索法,即指向最小的势函数[10~11]。为规避障碍物,在障碍物周围环绕斥力势场,在目标点环绕引力势场。障碍物、目标点、无人机在模型中简化为质点,如果环境中没有障碍物则其能量能很好驱动无人机到达目标的中心位置。在有障碍物的环境中,在障碍物的位置排斥无人机的斥力将叠加到合力中。无人机所受力的方向为势场的负梯度方向。这个力驱使无人机向着势能下降的方向运动直到势能最小的位置。

图2 障碍物周围斥力场
在无人机航路规划建模的研究中,常常考虑到实际规划中威胁源未知多样[12],但一般遵循随着距离的增加而威胁强度减小的特点,可对模型进行简化。假设无人机在二维平面上等高飞行,取威胁区域为预定飞行高度在水平面内的投影,定义威胁中记为圆心,构建圆形区域表示,小圆内的空间表示禁飞区,圆环为威胁区,圆外为自由飞行区。通过威胁建模,将复杂的无人机路径规划问题简化为躲避圆形威胁区域的路径寻找问题,并将复杂的问题具体化。
无人机避障就是在移动环境中及时有效地避开前进中的障碍物,采用基于人工势场法的避障策略特点是无人机的运动方向受其所处位置的势场和负梯度决定的,相比其他避障算法具有计算量小、实时性高等优点。但也存在很多难以解决的问题,如目标点不可到达、局部最小点问题等。
目标点不可到达问题即无人机在目标点周围不停的振荡,且始终无法到达目标点。当无人机向目标点移动且离目标点距离比较近时,在当前位置引力大于斥力,无人机朝着目标点移动;当无人机移动到下一个位置时,如果斥力大于引力,则使得无人机朝远离目标点方向移动,从而导致无人机在目标点周围反复靠近与远离相交替移动,使无人机始终无法到达目标点。
局部最小点问题即无人机在运行中的某一点达到受力平衡,合力为零,使机器人无法移动。当机器人运行到某一点时,机器人所受斥力等于机器人所受引力,使得全局合力F等于零,导致机器人停在当前位置无法移动。针对这些问题将引入伪人工势场模型(PAPF)进行解决。
3 伪人工势场模型(PAPF)
传统的人工势场方法中,目标位置对智能体有引力,映射到无人机航路规划问题中,即目标与无人机之间存在引力。然而这样的设定会带来一些问题,例如,无人机航路可能过于弯曲导致航程浪费等。为了解决模型中的这些问题,引入了“影子无人机”概念:每架进行航路规划的无人机都有一枚对应的影子无人机,影子无人机速度和质量与对应无人机相同,是一个虚拟对象,用以辅助航路规划。在某一时刻某无人机所在位置为航路规划段的起始点,速度为v;与此同时,该架无人机对应的影子无人机位于目标点处,速度为v',速度方向与目标—影子无人机连线的方向一致。将影子无人机的实时位置设定为目标位置,与无人机之间有引力作用。此时,依照伪人工势场模型,无人机和影子无人机同时开始运动。最终,要求两架无人机相遇,满足条件:

D为无人机与影子无人机的距离,X=(xm,xs),Y=(ym,ys)为二者位置坐标向量,φ为二者航向。无人机和影子无人机相遇形成的轨迹即为航路。
无人机的运动主要由速度和航向来描述,航路规划段中无人机速度不发生变化,而航向则时刻受外力调整,如图3所示。
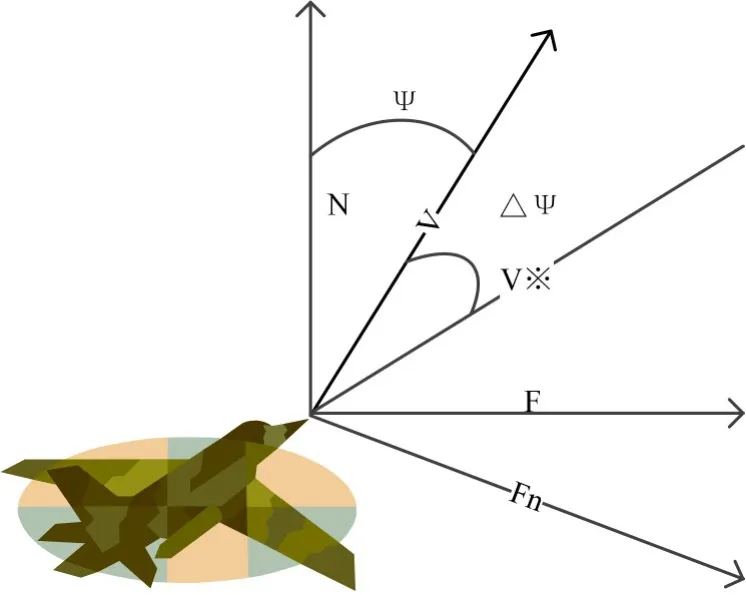
图3 无人机运动规律
无人机航向φ满足:

则无人机运动方程可以表示为

4 基于伪人工势场(PAPF)的航路规划方法
通过对势场进行合理的设计,理想情况是:运用人工势场方法进行路径规划时,智能体只需“记住”一张全局势场“地图”,便可以在“地图”上任意位置开始运动并最终找到目标。该方法可以提前判别无人机是否会相撞,从源头上解决无人机的相遇问题。而且,这一特征对航路规划问题具有非凡的意义——如果势场设计得当,该模型可以实现多无人机的在线航路规划。然而,无人机的运动方式要考虑与无人机相关的约束条件,并由此对人工势场模型做出调整,使这种方法得到的路径适合于无人机飞行。
5 结语
本文介绍了人工势场原理,研究了人工势场中无人机的运动原理,引入了威胁区和禁飞区的概念。针对人工势场法避障规划存在的目标点不可到达和局部最小点问题,引入了PAPF模型。在这个模型中,通过影子无人机作为虚拟对象,用以辅助航路规划,并提出了基于伪人工势场(PAPF)的航路规划方法,为后续的研究奠定了理论基础,同时为无人机在部队训练、装备测试评估等方面提供技术支持。
猜你喜欢
火力与指挥控制(2022年2期)2022-03-23
北京航空航天大学学报(2021年4期)2021-11-24
指挥控制与仿真(2021年3期)2021-06-15
汽车工程(2021年12期)2021-03-08
动漫界·幼教365(中班)(2020年3期)2020-04-20
火力与指挥控制(2020年2期)2020-04-02
导航定位与授时(2020年1期)2020-02-18
电子技术与软件工程(2020年7期)2020-02-05
创新作文(1-2年级)(2019年4期)2019-10-15
北京汽车(2019年4期)2019-09-17
