
无人系统集群海上作战应用研究∗
2019-12-26 11:32:42郭兴旺
舰船电子工程 2019年12期
王 宇 郭兴旺
(91404部队 秦皇岛 066000)
1 引言
无人系统集群作战开启了作战新模式,将成为未来海上信息化战争常态模式。智能化海战模式可分为三类:人工智能辅助人员的海战模式、人工智能和人员高度融合的海战模式以及人员辅助人工智能的海战模式。第三类海战模式其特点是由无人装备、智能化指挥控制系统自主完成作战行动,在整个作战过程中人员不做任何干预或者仅在关键节点进行有限干预,是智能化海战的终极目标。无人系统可自主组成战斗集群,运用无人系统集群战法使得低成本的无人系统组合成高弹性的作战力量。集群协同作战更能发挥无人系统的优势,提高任务成功率,完成单个无人智能个体难以完成的任务。
无人装备正在向高空、高速、深潜和小型、微型化两个方向发展,作战维度也向两端扩展。一方面,高空、高速和深潜型无人作战平台,能够实施多空间、多方向、多角度同时突破,实现了维度外扩。另一方面,小型、微型无人作战平台,可渗透到敌内部空间,实施内窥式侦察和微创式打击,实现了维度内扩。无人系统集群具有强大的战场生存能力、环境适应能力、突防能力,可用于集群协同侦察、快速强力突击、全域集群对抗、精准高效保障等任务。
2 无人系统集群作战样式
无人系统包括空中无人机系统、水面无人艇系统以及水下无人潜器系统等,将多个无人系统所构建的集群应用于海上作战,为满足作战任务需求呈现出不同的作战样式。
2.1 无人机集群作战
无人机集群作战拥有单个无人平台作战无法比拟的优势,可在广域搜索、侦察监视、精准打击等任务中大显身手,其作战样式主要包括:
1)攻—实施多域打击。无人机编队可以携带不同类型设备和弹药,同时对敌方陆地、海上、空中和网络等多个作战域实施全方位、多样式的攻击,从而破坏敌方的跨域联合能力,以较小的代价实现作战目的。
2)扰—进行战术欺骗。无人机通过释放大量假目标,迷惑敌防空指挥系统,诱骗敌雷达开机,进而实现对关键目标定位及摧毁。还可充当掩护,无人机集群组成前沿电子战编队,对敌方的预警雷达、制导武器进行电子干扰、压制、欺骗等,掩护己方核心作战能力。
3)侦—扫描战场环境。挂载各种侦察探测设备的无人机集群编队,能够轻易突破敌方防空雷达的侦测潜入对方防护严密的区域进行抵近侦察,并通过集群间的数据链,将情报中继传回,为作战提供可靠的敌情保障。
4)联—开展协同作战。一种是人机联合,大量低成本无人机携带大量各种类型的传感器以及导弹,组成前沿作战编队,而有人驾驶飞机则从后方对集群无人机进行指挥控制,或与有人机组成编队,由有人驾驶飞机控制无人机僚机编队作战。另一种是机群联合,无人机集群可形成一个具备侦察、干扰和打击能力的复合编队,或由若干个无人机集群分别配置侦察、火力模块,再组成一个大型突击编队。
下面以无人机集群作战实例“蜂群战法”来说明无人机集群海上作战应用。蜂群战法是指由数十架小型无人机,根据作战任务自行编组,形成攻击蜂群,协同对敌发动攻击的作战方法。其核心是以小取胜、以量取胜、快速协同取胜,体现了动态聚能、精准释能、以量取胜的制胜思想,打通了“侦察-控制-打击-评估”链路,融合了相关作战要素,形成敏捷、高效、精确的新型无人化作战体系。2015年4月,美海军研究团队对这一战法进行了实验验证,模拟良好气象条件下,一艘安装“宙斯盾”系统的驱逐舰遭受5~10架来自不同方向无人机攻击的情况。结果表明,蜂群战法能够突防目前海上综合防御能力最强的“宙斯盾”系统。如图1所示,大规模、低成本、多功能的无人机集群通过空中组网、自主控制、群智决策,完成对海上作战目标的侦察监视、干扰和打击。

图1 无人机蜂群作战系统示意图
2.2 无人艇集群作战
无人艇集群可广泛执行扫雷、反潜、信息作战、侦察监视、目标指示、通信中继和反恐攻击等任务,其作战样式主要包括:
1)反水雷战。用于浅海和极浅水域的水雷侦察和扫雷行动,执行的任务包括远程施放、拖曳、回收猎雷声纳;清查航道,提供海底图像的细节;将视频图像和声呐数据传给反水雷舰,为反水雷舰艇进出港口提供港口护卫。
2)反潜作战。用于扩展海军探测敌方潜艇的能力,可执行海上防御、通道保护、港口侦查以及保护海军水面战斗群的反潜任务等。
3)支持海上信息作战。通过携带不同功能载荷,抵近敌信息平台,可以在危险海域执行电子干扰、通信中继、电子欺骗、海上反辐射攻击等作战任务。
4)支持水面舰艇作战。用于为海上舰艇提供保护,执行海上封锁/拦阻、可疑目标打击、特种作战、后勤支援与补给、战场评估、取证等任务。
美国海军于2014年和2016年分别进行了CARACaS(机器人自主指挥与感知的控制体系结构)技术演示验证。如图2所示,2016年演示验证成功使无人艇集群协同、自主地实施了巡逻任务,任务执行过程只有远程人员监控,没有直接的人员操控。2014年演示验证中所有无人艇都预置同样程序,但因缺乏协同规划造成多艇蜂拥而至的行为,2016年的实验显示CARACaS新增了协同任务分配、更多的行为和战术以及自动舰船识别等能力。集群无人艇能够制定计划、进行任务分工,采用的行为引擎(Behavior Engine)能使编程人员创建一个复杂行为模式库,更容易使CARACaS软件进行行为更新,集群无人艇最终将能执行大量不同任务。
2.3 无人潜器集群作战
近年来水下冲突的可能性越来越大,无人潜器将从秘密探测器和追踪器,转变为水下攻击武器和协同作战装置,无人潜器集群作战也将成为可能,其作战样式主要包括:
1)协同感知行动。无人潜器集群利用多型水下传感器,按照任务分工、编成与部署,发挥传感器的各自优势、传感器相互配合,完成复杂条件下对水下目标的检测与定位和水文、地理环境的感知,为水下作战提供情报信息。

图2 无人艇集群执行巡逻任务
2)协同干扰行动。无人潜器集群利用艇载干扰设备,通过协同各自的航线、节点和干扰信号,干扰对方水下武器覆盖区,使其短时间内无法正常工作,为己方水下武器装备行动创造条件。
3)协同诱骗行动。无人潜器集群利用艇载诱饵装置,根据指控系统指令适机欺骗对手的感知系统,引诱敌方水下火力开火、攻击错误目标、使其消耗弹药,为水下有人/无人攻击编队行动创造条件。
4)协同伏击行动。无人潜器集群使用艇载弹药等,按照指控系统指令启动预先蛰伏部署的兵力,或与有人潜艇配合使用,从多个阵位、多个角度对敌方单个或多个水下目标实施伏击。
5)协同水面行动。无人潜器集群利用传感器、通信设备,根据预定程序或指控系统临时指令,为水上己方舰船发送水下情报信息,引导其排雷、反潜攻击行动。
6)协同空海行动。无人潜器集群利用传感器、通信设备,根据预定程序或指控系统临时指令,向空中待战的航空器、海上待战的反潜舰船发送水下情报信息,引导其攻击敌方水下目标行动。
7)集群对抗行动。无人潜器集群根据指控系统指令,使用所有艇载传感器、信息战设备、通信设备、各种弹药,与敌方的无人潜器集群和敌方空中、海上反潜武器展开侦察与反侦察、干扰与反干扰、欺骗与反欺骗、攻击与反制等对抗行动。
美军正在构建一支新型的水下无人作战部队,2020年将拥有至少1000套水下机器人,2025年达到2000套。届时,水下作战任务将更多由无人作战系统承担。图3是美军已建成的无人潜器集群,各型无人潜器可参与集群协同作战。
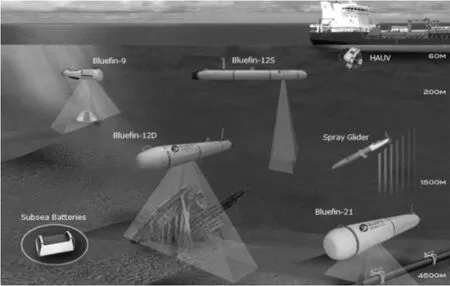
图3 无人潜器集群作战示意图
3 无人系统集群作战的技术特点
通过对无人系统集群作战样式的分析,可知集群作战具有以下几个技术特点。
1)作战功能分布化
分布式探测。将单个完备作战平台所具备的各项能力化整为零,分散到大量低成本、功能单一的作战平台中,系统的倍增效应将使无人系统集群具备远超单一平台的作战能力。广域分布的多平台能够相互协作、相互验证及融合判断,完成对战场目标的精准定位,提高整体探测能力。无人系统集群内各作战平台联网行动,能够实现平台间的数据信息共享,可以达到“一点发现、全网皆知”,为实现协同作战奠定基础。
分布式生存。无人系统集群具有无中心和自主协同的特性,集群中的个体并不依赖于某个实际存在的、特定的节点来运行。在对抗过程中,部分随机个体的失能并不会破坏整个集群的功能完整性,集群仍可继续执行作战任务。
分布式打击。集群作战方式下,将侦察监视、诱骗干扰、火力毁伤、效果评估等紧密藕合、相互衔接的各项能力,分散到低成本、功能单一的作战平台中,形成大量结构各异、功能互补的个体单元,通过交互协作实现原本复杂的联合作战功能,对威胁目标进行灵活打击,防御方需要消耗数十倍甚至上百倍的成本来进行防御。
2)作战行为智能化
集群智能是实现无人集群战法的基础条件,其优势为:一是系统单个个体的能力和行为规则非常简单,便于个体的模块化设计生产和集群系统的组织实现;二是集群智能为分布式无中心的控制方式,集群中每个个体既彼此自治又高度连接,随着群体数量的增大,通信开销的相对增幅较小,集群规模具有较好的可扩充性;三是集群表现出来的复杂行为是通过简单个体的交互过程突现出来的智能,这使得集群在适当的进化机制下可以实现单个智能个体无法实现的功能。
3)作战效能涌现“1+1>2”效应
无人集群通过实时动态编组,在线任务分配、集群协同突防的方式,实现了以量取胜、动态聚能、精准释能的饱和攻击,整体效能大于单个效能的累加和。这主要体现在:集群将原本造价高昂的多任务系统分解为若干低成本的小型作战平台,比传统武器系统更具成本效益;集群能够多维感知战场态势,自主执行作战计划,精确选择打击目标,自行分配进攻任务,联合进行火力打击,可以短时间内从多角度、多方向发起集群进攻。
4 无人系统集群作战过程中的技术难题
通过对无人系统集群作战过程的梳理分析,可知其主要面临以下技术难题。
1)态势感知与数据融合。无人系统集群的感知与认识能力是其控制与决策的依据。目前集群感知手段主要有基于自身携带传感器主动获取战场环境的态势感知,基于数据链接收集群其他个体的态势共享信息并形成统一的通用操作视图。其相关技术包括多源异质传感器分布式信息融合、集群态势共享与通用作战视图、目标协同检测-识别-跟踪技术、突发威胁协同探测与定位技术等。无人系统集群中的多个体功能、空间位置的协同分布为集群态势感知提供了更多可能性,针对不同的协同态势感知方式和架构,需要采用不同的模型,针对性地采用不同的数据融合技术。
2)协同任务规划与决策。无人系统集群的规划与决策能力是其作战过程的核心能力。不同的任务在作战目标、时序约束、任务要求等方面存在显著的差异性,并且任务之间可能存在约束关系,因此如何规划最优作战策略显得尤为关键。无人系统集群在不确定环境中和最少的人工干预下,通过集群协同决策,促使各个个体自适应地采取某种机动策略,使无人系统集群涌现出更有效的智能行为。针对高对抗、强不确定及时间敏感的环境中随时可能出现的包括任务目标改变、威胁和环境变化、集群成员损伤等突发情况,需要无人机集群具备实时任务调整和重规划的能力,快速响应外界环境的变化,提高任务效率和使用灵活性。
3)信息交互与自主协同控制。无人系统集群的信息交互与自主协同控制能力是完成作战任务的前提。协同控制是指在执行任务过程中,如何形成并保持一定的几何构型,以适应平台性能、任务环境、战术任务等要求,主动解决编队生成与保持、智能避障和不同环境下编队构型的动态调整和重构等问题。集群控制技术挑战在于集群中无人个体数量越多难度越大、集群间的避碰控制、队形自组织和拆分/重组等、集群协同航行控制技术。集群系统具有高度复杂性、行为多样性,需要多种控制策略的组合来满足协同控制需求。
5 无人系统集群对抗技术难点与挑战
无人集群系统对抗将成为越来越重要的一种作战样式,集群对抗技术将成为智能化战争的核心关键技术,其面临的技术难点和挑战还很多,主要表现在:
1)群体对抗建模方面。一是对群体智能的演化、学习、自组织基本原理的认识仍不充分;二是在建模具体方法上需深入研究大规模无人集群协同体系对抗的动态自适应模型;三是需研究双方甚至多方集群对抗过程的演化机理、定量和定性分析。
2)集群协同决策与规划方面。一是深化集群架构的研究,并从理论上探索新型的群体智能协同组织架构与方法;二是研究在实际应用中如何在有限、甚至不可靠的通信、计算等资源下,进行有效、可靠的协同决策;三是使群体决策的结果具有可解释性。
3)集群智能控制方面。一是底层的运动控制,二是逻辑结构与关系的可控性,三是功能的优化与控制。集群对抗过程个体存在不确定性,但通过集群的组织和控制,实现集群整体的可控,对集群控制规则的深度和广度进行量化研究,研究适应于集群对抗的智能控制方法是将无人集群系统大规模应用于实战所必须攻克的难题与挑战。
6 结语
具有“平台简单、高度协调、完全自主、群体智能”特点的无人系统集群的应用改变了海上作战的作战样式,无人作战平台凭借其自主交互和联动响应的优势,实现横向联通、纵横一体,大大提高海上作战指挥控制的效率,将引发新一代战争模式的颠覆性变革。无人系统集群必将成为未来海战场中的重要作战力量,在海洋战争及海陆空协同作战中扮演重要角色。本文分析了无人系统集群海上作战应用的作战样式、技术特点、技术难题以及集群对抗技术难点与挑战,还需深入研究无人系统集群作战方法,以在未来战场中取得对抗优势,实现集群作战效能最大化。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:36:42
数字海洋与水下攻防(2022年2期)2022-04-26 09:09:24
军事运筹与系统工程(2019年4期)2019-09-11 06:39:58
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
电子制作(2018年11期)2018-08-04 03:25:40
舰船科学技术(2017年5期)2017-06-19 19:18:59
中国交通信息化(2017年3期)2017-06-08 06:09:28
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
