船体表面变形重构及其CFD数值计算网格自适应方法
2019-12-25 07:35:34李胜忠鲍家乐赵发明
船舶力学 2019年11期
李胜忠,鲍家乐,赵发明,梁 川,朱 锋
(中国船舶科学研究中心,江苏无锡214082)
0 引 言
CFD技术与船体几何重构技术及最优化理论融合形成的船舶SBD(Simulation Based Design)技术为船型设计和构型创新打开了新局面。它突破了传统CFD优化技术所指的多方案选优/优选,将CFD技术系统地融入优化过程,实现对目标函数的直接寻优,其实质是全局流场优化驱动的船舶水动力构型设计模式[1]。经过近些年的发展,许多科研单位已开始关注该方法的重要性及其展现的优越性,并纷纷投入研究力量开展技术攻关。
意大利INSEAN水池在基于SBD技术的船舶水动力性能优化设计方面开展了大量的研究工作,对船体几何重构技术、多目标全局优化技术、近似技术和综合集成技术(并行计算)等进行了较为系统的研究[2]。中国船舶科学研究中心(CSSRC)在以船舶快速性能(静水阻力和流场)为目标驱动的船型设计研究方面,也已开展了大量的基础性前沿工作,突破了船体几何自动变形与重构、全局最优化算法和优化流程综合集成等多项关键技术,建立了以静水阻力、流场为主要优化目标的低阻船型设计方法,并在低速肥大型船舶和中高速船舶线型设计中得以应用和验证,取得了十分显著的减阻效果[3-6]。
这种新的设计模式在低阻船型设计方面已经展现出了巨大的优势,但是目前能够解决的船型设计问题还比较单一,主要集中于船舶阻力性能。对于复杂的船舶实际工程设计问题,如:不同装载情况下的船舶阻力性能优化设计和考虑波浪环境下的船舶水动力性能综合优化设计等,该设计模式还需进一步拓展、深化和完善。其中一个重要方面是需要建立具有较好适应性的船体整体/局部变形与重构方法,解决优化过程中不同区域的复杂船体几何重构问题;另一方面需要突破高精度CFD求解器在自动优化设计中的应用瓶颈,即解决CFD数值计算网格的自动重生成或自适应问题。如此,则可提升成熟船舶CFD技术在自动优化设计中的应用能力,拓展新设计模式的应用范围,解决复杂的船舶水动力学设计问题,如波浪环境下的船舶水动力性能综合优化设计等。
如能建立一个模块,将船体几何自动变形方法与其数值计算网格结合起来,直接对船体表面网格(船体几何)进行自动变形重构,同时数值计算网格能根据船体表面网格的变形而自动进行自适应(类似弹簧可进行拉升和压缩),则将突破高精度CFD 求解器在船型优化设计中应用的瓶颈。基于此,本文在前期建立的复杂船体几何自动重构方法的基础上[7],重点开展数值计算网格自适应方法研究,为进一步拓展精细流场优化驱动的船舶水动力构型设计打下坚实的基础。
文中首先对精细流场优化驱动的船型设计原理进行了简要介绍,之后描述了FFD船体整体/局部几何变形重构方法,最后详细阐述了船体表面网格自动变形与数值计算网格自适应方法及其实现过程。
1 精细流场优化驱动的船型设计基本原理
全局流场优化驱动的船舶水动力构型设计模式是以先进的虚拟水池试验技术为依托,以超级计算机集群的高速计算能力为基础,结合船体几何重构与变形技术,并将其融入基于现代优化分析理论的设计流程中,建立的一种以数值评估和数理优化为特征的船舶水动力构型设计模式。它是以船舶一项或多项水动力性能最优作为设计目标,在给定的约束条件和构型设计空间内,通过CFD 数值评估技术和现代最优化技术实现船舶水动力构型的优化求解从而最终获得给定条件下的水动力性能最优的船型。它主要包括最优化技术、复杂船体几何自动重构技术和船舶水动力性能评估技术等关键技术(见图1)。

图1 SBD船型设计模式Fig.1 SBD-based hullform design optimization environment
最优化技术在整个优化设计流程中充当“指路器”:即为优化设计问题的求解提供科学方法,科学地指导最优解的搜索方向。其作用是快速、准确地搜索到构型设计空间中的全局最优解。该技术作为一门独立的学科已经较为成熟。
船体几何重构技术在整个优化设计流程中充当“链接器”:其作用是自动生成尽可能多的设计方案;直接决定船型优化问题的设计空间“大小”。船体几何重构技术目前已取得突破,建立了诸如Bezier Patch、FFD 等船体几何变形与重构方法,并进行了相应的应用[7-8]。然而,有些类型的船舶在线型设计过程中会涉及到复杂的船体几何变形/重构问题,比如不同装载(吃水)情况下阻力性能最优的船型设计,由于变载情况下船舶吃水不同,因此对阻力敏感的船体区域也不同。此外,球艏对船舶的阻力性能影响也十分明显,在船体几何重构时,船舶整体与局部敏感区域以及球艏应同时统一考虑,故需要解决船体几何整体与局部相结合的变形与重构问题。
船舶水动力性能预报评估技术是建立船型优化问题数学模型的基础,是连接船体几何外形和优化平台的纽带。作为“评估器”,其主要用于设计目标的评估与预报。通常,评估工具依据所解决的设计问题来进行选择,目前以减小兴波阻力为优化目标的船型设计问题较多,如文献[9-11]。当前高精度船舶CFD技术也已广泛应用于船舶航行性能评估,但其在船型自动优化设计流程中的应用还较少,主要原因是数值计算网格的自动重生成或自适应问题没有解决,这也是制约高精度求解器应用的瓶颈。作者通过利用GAMBIT 网格建模软件的命令流实现了船体结构化网格的自动重生成[3,5],开展了对散货船和DTMB5415等船型的优化设计。由于该方法的实质是对变形重构后的船体按照原网格划分流程自动重新划分网格,因此,对于船体大变形或复杂船体几何,自动重生成方法的适用性受到限制。因此本文将对网格的自适应方法进行研究,避免出现上述问题,提升高精度CFD技术在船型自动优化设计过程中的应用能力。
文中介绍的船舶水动力性能评估采用基于RANS的CFD数值计算方法:湍流模型选用SST-kw,自由面处理采用Level-set方法,动量方程的离散采用有限差分方法,控制方程的离散采用体积中心有限差分方法,压力速度耦合问题选用流场中经典的SIMPLE 算法进行处理,计算网格采用结构化重叠网格技术。
2 船体表面几何整体/局部变形重构方法
船体几何重构技术是实现SBD 船型设计的前提条件。在船型优化过程中,设计变量将依据优化算法做相应的调整,而设计变量的调整将体现在船体几何外形的变化上,如何用尽可能少的设计变量实现尽可能广的船体构型设计空间(尽可能多的不同船体几何),是船体几何重构技术追求的重要目标,当然也是形状优化设计中的一个难点。
目前用于船型优化设计的几何重构方法主要有:经典的Lackenby变换方法、叠加调和方法(Mor‐phing Approach)、参数化模型方法、Bezier Patch Approach、自由变形方法(Free-Form Deformation Ap‐proach)和基于CAD 方法(CAD-based Approach)等。其中FFD 自由变形方法是几何变形的典型代表,它最早在1986年由Sederberg和Parry[12]提出,现已广泛应用于几何造型、计算机动画、图像视频处理和科学数据可视化等领域。从数学上看,该方法的基本思想是建立一个从待变形物体空间到目标物体空间的三维映射,定义域是待变形物体的点集,值域是变形后物体的点集,核心部分是如何构造映射。其基本原理为:首先,根据变形区域确定一个被称为格子(Lattice)的长方体,并进行局部坐标变换将待变形物体线性地嵌入到格子中;其次,在格子上定义控制顶点网格,使格子变为三维张量积Bezier体;最后,通过调整格子的控制顶点,让格子发生形变,并将形变传递给待变形物体。本文将对FFD方法在船体整体+局部自动变形重构中的应用流程进行简要介绍。
Sederberg和Parry使用三变量张量积Bernstein多项式和控制框架来构造映射,详细的数学模型见参考文献[1]。船体表面任意一点的笛卡尔坐标X可以表示为:

式中:Bi,l(s),Bj,m(t)和Bk,n(u)分别为l,m和n次Bernstein多项式基函数;Qi,j,k为控制顶点三维坐标。
采用FFD自由变形方法进行船体整体+局部几何重构的流程如下:
(1)初始船体几何(整体)按照如下方法进行“网格化”:将整个船体表面沿纵向划分为m 个点,沿垂向划分为n个点,则船体表面划分为m×n个网格(m 和n的大小选取应遵循能够精确地表征船体几何曲面的原则,在船体几何外形变化剧烈的区域应该加密);
(2)将船体几何表面的“网格点”归一化,即网格点的坐标由(x,y,z)变为(x/L,y/L,z/L);
(3)将网格点装入长方体(控制点)中;
(4)建立网格点与长方体控制顶点之间的映射关系;
(5)根据船体几何重构区域形状特点,选择设置若干个设计变量,每个设计变量由长方体的若干个控制顶点组成;
(6)改变设计变量,通过映射关系计算获得重构后船体网格点的坐标;
(7)之后将需要进行变形的船体局部区域(比如球艏)的网格点进行归一化,然后装入另外一个长方体中;
(8)建立局部区域网格点与长方体控制顶点之间的映射关系;
(9)根据局部几何区域形状特点,选择设置若干个设计变量,每个设计变量由长方体的若干个控制顶点组成;
(10)改变设计变量,通过映射关系计算获得局部区域重构后网格点的坐标;
(11)将网格点坐标导入CFD 数值建模软件中,采用NURBS 方法将船体网格点拟合成新的船体曲面;
(12)重复(6)~(10)步,即可实现船体几何变形与重构。

图2 船体整体与局部相结合自动重构示意图Fig.2 A schematic diagram of combined local and global hullform modification and reconstruction
以一艘集装箱船为例,采用整体与局部相结合的重构方法实现其几何外形的自动变形重构:主体+船首(球艏)。具体如下:首先将离散后的船体装入长方体(控制点)中,如图2(a)所示,通过控制点对船体进行整体变形/重构;然后,将船首几何装入另外一个长方体(控制点)中,如图2(b)所示,通过新的长方体控制点对船体局部(球艏)进行变形/重构;最终获得的船体几何如图2(c)所示。如此通过两个长方体的控制顶点(分别控制船体整体形状和局部形状的变形)即可实现船体整体与局部的自动变形与重构。
3 结构化体网格自适应方法
将船体几何自动变形与其数值计算网格结合起来,直接对船体表面网格(船体几何)进行自动变形重构,同时整个数值计算网格能根据船体表面网格的变形而自动进行自适应(类似弹簧可进行拉升和压缩),即,直接对船体数值计算网格进行自动变形重构,如此既能保证变形后网格的质量与变形前相同,又能提升适应性(可用于复杂外形以及大变形)。该方法将解决高精度CFD 求解器在船型优化设计中的应用问题,如图3所示。基于此,开展数值计算网格自适应方法研究,之后利用已建立的船体几何变形重构方法,从而实现船体面网格的变形及体网格的自适应。

图3 船体表面网格自动变形重构与其体网格自适应Fig.3 Automatic deformation reconstruction of hull surface mesh and volume grid self-adaption
3.1 网格自适应方法
FFD 船体几何变形重构方法可实现船体物面网格的变形。文中RANS求解器采用结构化网格(物面贴体网格+背景网格重叠合并生成),优化过程中不同设计方案的体网格将根据变形重构的物面网格和初始体网格获得,其具体方法如下:
假定初始体网格沿物面方向外推了jmax层网格(j=1表示物面网格),则任意网格点位置xorgj处的加权值定义为

新的体网格与原始体网格具有相同的外边界,且任意网格点xmodj处的加权值与原始网格一致(图4),则新的体网格任意网格点就可以通过下式自动获得:

上述方法自动获取的新变形体网格是由船体表面的正交矢量和初始体网格的网格间距决定,具有与初始体网格相同的拓扑关系和几乎一致的网格属性(正交性、偏斜率等),这样获得的新体网格质量非常高,可以将优化过程中由于网格划分引起的“数值噪声”降到最低,基本可以避免数值计算网格对优化设计结果的影响。
该方法的实质是依据优化过程中船体表面(即船体表面网格)的变形/重构实现体网格的自适应。由于RANS求解器的网格采用结构化网格(物面贴体网格+背景网格重叠合并生成),初始贴体网格是由船体表面网格外推生成,适用于复杂船体外形,具有较好的正交性。因此,上述网格自适应方法可用于复杂船体外形的变形/重构,且具有非常好的适应性,能够适应船体几何大的变形/重构。
变形前后船型的静水力参数(排水体积、湿表面积、浮心位置和横稳性高)通过船体表面网格进行计算,输出后可直接用于判断是否满足优化设计的约束条件。

图4 网格自适应示意图Fig.4 A schematic diagram of grid self-adaption
3.2 船体网格自动变形与重构实现流程
(1)首先,针对原型方案进行建模,划分网格。采用Grigren 对船体表面划分网格,并外推生成贴体网格,之后与背景网格进行重叠合并,最终生成原方案数值计算网格(见图5);

图5 贴体网格与背景网格合并示意图Fig.5 The combination of volume-fitted grid and background grid
(2)将船体表面网格提取出来,网格节点可以表征船体表面;
(3)利用前文的FFD几何重构方法直接对船体表面网格进行自动重构/变形。输入是船体表面网格文件,输出是变形后的船体表面网格文件(见图6);
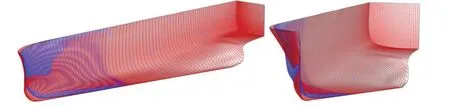
图6 船体表面网格(艏部)变形前后对比Fig.6 The comparison of the hull surface grid before and after deformation
(4)采用上述网格自适应方法将变形后的船体表面网格与初始体网格进行合并,即生成变形后的计算网格,如图7所示。
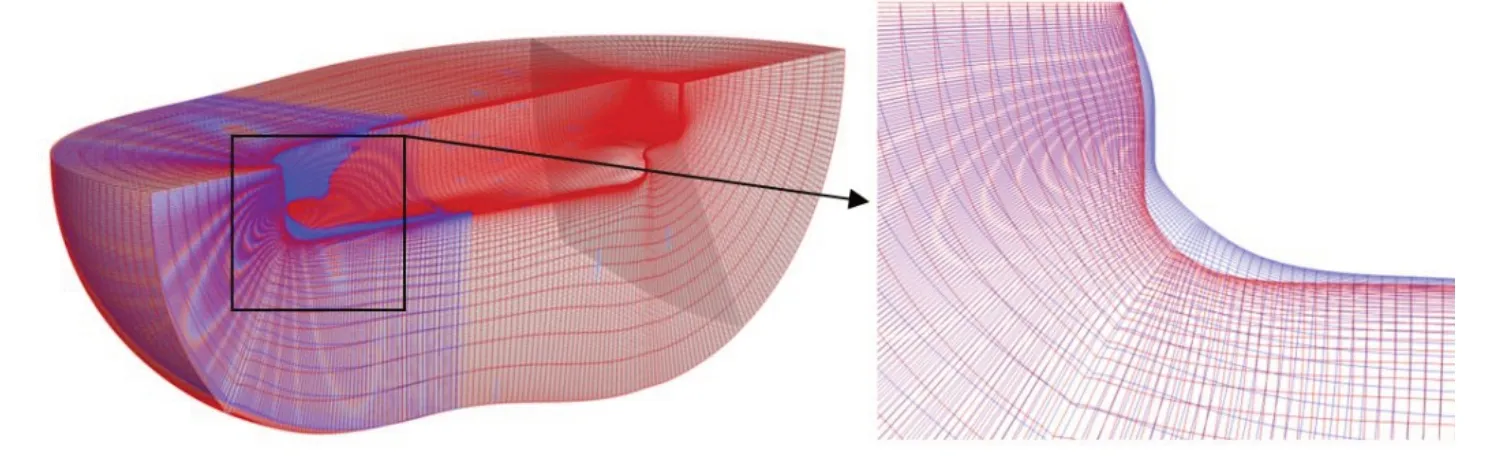
图7 变形前后体网格对比Fig.7 The comparison of the volume grid before and after deformation
4 结 论
将船体几何自动重构/变形与数值计算网格结合起来,实现了直接对船体表面网格进行自动变形重构,同时数值计算网格根据船体表面网格的变形进行了自适应。本文首先介绍了基于重叠网格技术的船舶性能数值计算方法,并简要给出了已建立的FFD船体几何重构方法及其流程,之后详细介绍了船体表面网格自动变形与数值计算网格自适应方法及其实现过程。获得的主要结论如下:
将FFD 自由变形技术与船舶数值计算网格结合起来,实现了直接对船体表面网格进行变形/重构,而数值计算网格自动进行了自适应。该方法的建立突破了高精度数值评估方法在船型优化设计中应用的瓶颈,为开展以船舶复杂水动力性能优化为目标的船型设计打下了坚实的基础。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28 08:19:52
摄影世界(2022年1期)2022-01-21 10:50:14
知识经济·中国直销(2018年12期)2018-12-29 12:22:14
商周刊(2017年6期)2017-08-22 03:42:36
山东大学法律评论(2016年0期)2016-08-16 03:24:12
——福船
西部交通科技(2015年4期)2015-07-25 11:29:08
焊接(2015年9期)2015-07-18 11:03:51
西部交通科技(2015年6期)2015-07-01 23:47:01
海军医学杂志(2015年2期)2015-02-27 13:47:42
中国美容医学(2015年5期)2015-01-21 10:46:53