无人机空中基站对地信道建模及功率覆盖预测
2019-12-24 08:01杨婧文陈小敏仲伟志朱秋明姚梦恬
数据采集与处理 2019年6期
杨婧文 陈小敏 仲伟志 朱秋明 陈 兵 姚梦恬
(1.南京航空航天大学电磁频谱空间认知动态系统工业和信息化部重点实验室,南京,211106;2.南京航空航天大学计算机科学与技术学院,南京,211106)
引 言
近年来,无人机(Unmanned aerial vehicle,UAV)技术日趋完善。随着续航时间延长和成本降低,UAV的应用领域逐渐从军事推广至民用。当灾情导致大面积通讯瘫痪时,UAV能够短时间内飞至指定位置,利用机载设备为地面移动通信设备提供基站服务。UAV的高机动性使其可以调整状态以适应复杂通信环境,而空中基站特有的视距通信链路又可高效地实现信号覆盖[1]。因此,基于UAV平台的空中基站被认为是未来移动通信系统的重要应用之一,而深入研究空地信道模型及特性对UAV通信系统的设计和优化具有重要意义。UAV信道根据UAV的作用范围可分为高空(20~50km)平台空地信道和低空(<20km)平台空地信道[2]。目前,高空平台空地信道主要考虑路径损耗,信道模型研究也比较成熟。低空平台空地信道受地面环境因素影响大,多径和多普勒效应更明显,系统化的信道测量并构建符合真实的信道模型还有许多问题急需解决。
国内外学术界对无人机信道开展了研究,包括基于实测数据的统计模型和基于理论分析的确定性模型。Matolak等[3]研究了城市场景下UAV信道的路径损耗、均方根时延扩展、功率延迟分布等信道统计参数;Jin等[4]提出了一种球体随机几何信道模型(Geometry-based stochastic channel model,GSCM)并分析了其空时相关特性,发现当无人机沿直线向用户方向移动时,通信链路处于最稳定状态,但缺少对特定场景的仿真验证;Zeng等[5]提出了双圆柱GSCM,指出随着通信距离的增大,无人机自身的移动对于链路稳定性的影响减小,该模型虽然结合了射线跟踪法,但未利用射线跟踪法进行仿真验证;Zhu等[6-9]提出了半球GSCM并仿真分析了自相关函数、互相关函数、功率谱密度等时变统计特性;其中,文献[7]引入旋转矩阵来描述无人机的三维不规则轨迹,使该模型更具普适性。
鉴于无线信道实测耗费大量的人力和物力,基于几何光学理论和一致性绕射理论的射线跟踪方法(Ray-tracing,RT)近年也来得到了应用[10]。随着通信载波高频化的发展趋势,信号波长远小于障碍物尺寸的应用条件也可以得到满足。Al-Hourani等[11]提出一种基于RT的城市场景传播损耗模型,能够显著加速机载通信服务,但缺乏完整的城市场景UAV信道模型;Chen等[12]提出一种以距离为参数的传播损耗模型,并给出了无人机处于不同位置的功率覆盖状况。需要指出的是,传统的统计模型是基于大量群体的共性特征,未仔细考虑传播环境的细节,对特定场景下的UAV信道很难做出精确的预测,而且由于小区划分逐渐变小,小区之间的统计相似性显著下降,使传统统计模型不再适用。而确定性模型中的射线跟踪法详细考虑了具体场景对电磁波的传播产生的影响,用电磁场理论对具体场景环境进行计算,适用于室内微小区和大城市中心城区的传播模型预测及分析。相对于传统的统计模型,射线跟踪在预测精度方面有着巨大优势。
针对UAV基站-地信道,建立了一种将GSCM与射线跟踪相结合的信道模型,该模型将传播路径分为视距路径、一次散射路径和二次散射路径;给出了3种路径的损耗、功率计算方法,该方法需要沿着路径推算电场,由电场计算出各参数。此外,利用数字地图预处理技术对城市建筑物进行了简化,省去建筑物表面的细节,以加速射线跟踪的计算。最后,仿真并分析了典型城市场景下UAV信道的传播特性及UAV基站处于不同高度时的信号覆盖情况。
1 UAV基站-地信道模型
射线跟踪方法可以辨认出所有可能的传播路径,并根据电磁波传播理论计算每条射线路径的幅度、相位、时延等,结合天线方向图和系统带宽得到接收点处所有信号叠加的结果。射线跟踪过程中的直射、反射、透射和绕射射线的电磁计算通过几何光学和一致性绕射理论来实现。典型UAV基站-地通信应用场景如图1所示,其中由于传播地理环境导致的反射和散射等影响,地面接收机接收到的信号通常包含直射路径、地面反射分量及周围建筑物散射分量。
UAV和地面接收机之间的复衰落包络表示为视距路径、一次散射路径、二次散射路径的叠加
式中:hLoS(t,τ),hSB(t,τ),hDB(t,τ)分别表示为

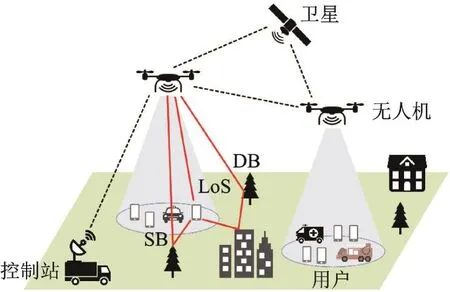
图1 UAV基站-地通信应用场景Fig.1 Air-to-ground communication scenario


式中:M为不可分辨非视距路径(Non-line-of-sight,NLoS)路径数目;N1,N2,N3为可分辨NLoS路径数目;Sn1为一次散射路径的散射体;Sn2,Sn3为二次散射路径的散射体分别为无人机、接收机速度矢量;vSn1(t),vSn2(t),vSn3(t)为散射体速度矢量;rtx(t),rrx(t)分别为无人机、接收机位置向量;分别为视距路径(Line-of-sight,LoS)在无人机、接收机处的单位方向向量分别为NLoS在无人机、接收机处的单位方向向量。
2 基于射线跟踪的信道参数计算
2.1 几何传播场景
基于射线跟踪方法的信道参数计算,需要建立在精确的环境数据资料基础上的大规模数据库,并解决极大的运算量问题。由于射线跟踪算法的计算时间主要由输入数据库的大小和几何射线路径的确定效率决定,减少数字地图中建筑物的数量和墙面的数量能够在一定程度上减少计算时间。为此,Degli-Esposti等[13]提出了2种不同的数字地图预处理方法:数据库信息量的减少和数据库的简化。这2种方法的基本思想是在进行射线跟踪计算前对所使用建筑物数据库进行简化,事先舍去对预测结果无影响的墙面、墙角或整栋建筑物来减少利用射线跟踪算法计算时的射线与面的求交次数,从而提高预测效率。这2种方法的不同之处在于前者要考虑发射机和接收机的位置,且对每个发射机和接收机做重复计算;后者没有此要求。
为提高该算法的运行效率,采用数字地图预处理技术,即将场景简化为若干直线和平面的集合(如弧面可以用若干平面拼接来近似拟合),利用较为简单规则的多边形来代替实际情况中的墙壁,不考虑墙壁表面的细节。针对卫星地图,选择每幢建筑物最左下角的坐标位置,提取长方体顶点的坐标信息以及建筑物的等效电参数,形成建筑物数据库,读取数据并进行可视化输出。以图2(a)卫星地图所示的加拿大渥太华街区场景为例,该场景中街道平行或垂直分布,便于观察且较为典型,场景规模为938m×575m,共130幢建筑物,包括614个面和劈。将上述方法用于渥太华街区,得到结果如图2(b)所示,小区中的建筑物都被简化为由点、线、面组成的长方体,建筑物高度范围为9~51m。城市场景中建筑物通常是混凝土结构,因此场景模型的参数值定为:建筑物表面的平均电性能参数为相对介电常数εr=6.81,电导率σ=0.95,地面的平均电性能参数为相对介电常数εr=10,电导率σ=0.005。数值仿真中反射次数取1~6次,绕射次数取1次。
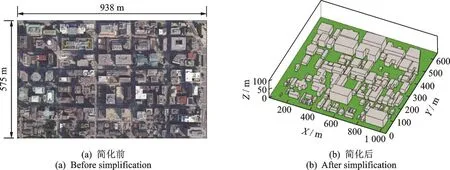
图2 几何传播场景的简化Fig.2 Simplification of geometric propagation scenario
2.2 传播路径损耗参数计算
实际中无线传播路径包括LoS和NLoS 2种,视距路径在接收点处的场强为

式中:k为波数,r0为直射路径的长度,E0为发射天线处的场强。
对于非视距路径,以发射天线为起点,用式(8)计算出天线在第一结点处的场强Einc,然后沿传播路径推算,推算过程到达接收点结束,最终获得该传播路径在接收点处的场强为

式中:X,Y,Z分别表示反射总次数、绕射总次数、透射总次数,Rx表示第x次反射时的并矢反射系数,Dy表示第y次绕射时的并矢绕射系数,Tz表示第z次透射时的并矢透射系数,Kp为经过第p次反射、透射或绕射后的扩散因子,rq为第q个散射结点与第q+1个散射结点间的距离。
为了计算传播损耗(dB)以及接收端的总信号功率Pr(dBm),需要先计算接收点处总场强,设该场强为Etotal,包含到达接收点的所有射线的场强

式中:N为总射线路径数目,En为第n条射线路径末场在天线极化方向上的分量。则传播损耗表示为

式中:λ为发射天线工作波长,E0为发射天线处的场强,Gt和Gr分别为发射天线和接收天线增益。
令发射功率为Pt,利用射线跟踪算法可得LoS,一次反射功率和二次反射的接收功率分别为
式中ESB,EDB分别表示为
3 数值仿真结果分析
对渥太华城市场景下的UAV信道建模过程进行了仿真。在仿真场景中,所传播的信号中心频率为2.6GHz,带宽20MHz,其他仿真参数如表1所示。取了2条典型路径,并考察路径上几个典型位置的功率时延状况及功率覆盖状况。收发端均采用全向天线,仿真时取前200条功率最高的路径用于观察。
为了分析无人机位置变化对参数的影响,取两条典型路径Trajectory 1和Trajectory 2,如图3所示,无人机在平行于地面且高度为50m的平面上任意飞行一段距离,接收机取位置Rx1且高度为2m。两条轨迹的路径损耗仿真结果如图4所示,无人机沿Trajectory 1飞行,当距离Rx1变近时,路径损耗整体呈现减小的趋势;而无人机沿Trajectory 2飞行时,由于与Rx1的距离变化较小,路径损耗值在一定范围内波动,在无人机飞至障碍物较密集的地带时,损耗有一定增加,飞至较空旷地带时,损耗则下降。
取上述路径中无人机的一个典型位置,无人机位置固定且高度为50m,地面接收机取6个典型位置,分别表示为Rx1,Rx2,Rx3,Rx4,Rx5和Rx6,高度均为 2m,其中Rx4,Rx5,Rx6分别由Rx1,Rx2,Rx3向远离UAV的方向平移120m得到。由于传播环境中的障碍物导致的反射和散射影响,到达Rx的接收信号通常包含视距路径、地面反射分量以及建筑物散射分量。图5为无人机到Rx1和Rx2的传播路径,这里显示功率最高的 3条。由图 4,5可以看出:(1)Rx1和Rx2距离较近,但传播路径上的散射点位置及数目差别较大,即信号传播受周围散射体变化的影响较大;(2)传播路径功率差异较明显,UAV和Rx1之间由于存在视距路径,路径功率较高,呈现红色,相比之下,UAV和Rx2之间不存在视距路径和地面反射径,路径功率较低,呈现黄色。因此,虽然城市场景中地形始终为平地,但是不同接收位置周围的建筑物形状、数目以及道路宽度、长度都使散射环境较为复杂。
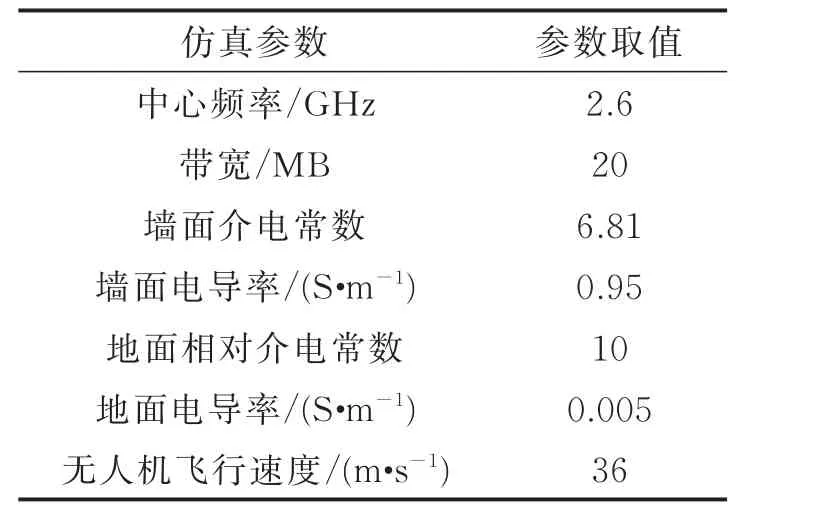
表1 仿真参数Tab.1 Simulation parameters
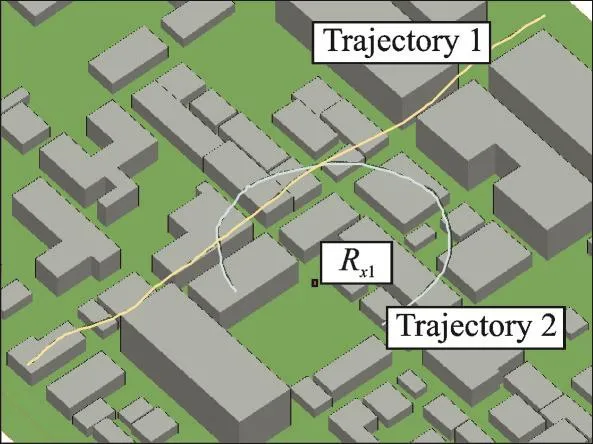
图3 无人机飞行路径Fig.3 Trajectories of the UAV
为了进一步观测地面接收机位于6个典型位置时接收信号功率及时延状况,图6仿真给出了上述场景中发射机位置固定,接收机位于Rx1,Rx2,Rx3,Rx4,Rx5和Rx6的功率延迟分布。由图可以看出:(1)信号传播受距离和位置的影响较大,由于UAV和Rx1之间存在视距路径和地面反射路径,Rx1接收到的信号功率明显高于Rx2和Rx3,且延迟更小;(2)平移一定距离之后,由于视距路径的存在,Rx4接收到的信号功率仍然明显高于Rx5和Rx6,但由于传播距离的增大,且散射环境复杂,平移之后,Rx5接收到的功率增大,而Rx6接收到的功率减小。
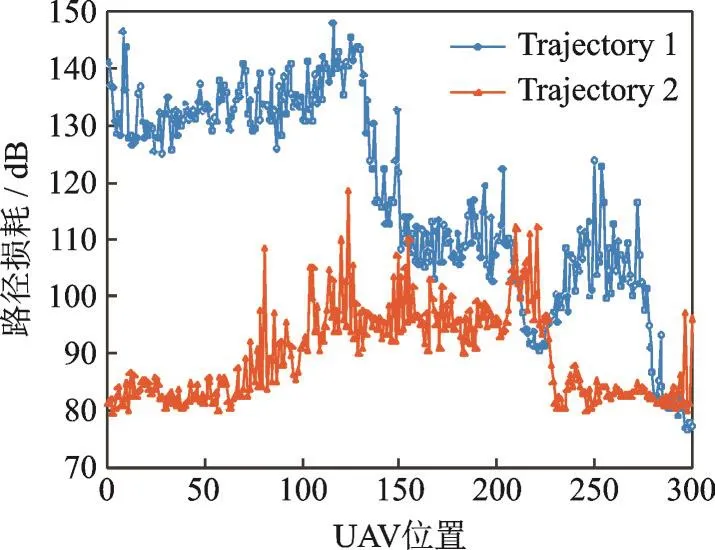
图4 传播路径损耗仿真结果Fig.4 Simulated pathloss of two trajectories

图5 传播路径比较Fig.5 Propagation paths
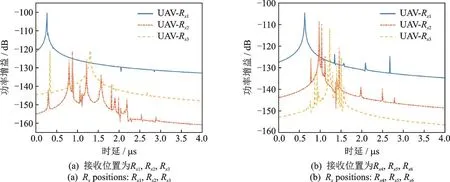
图6 不同接收位置的功率延迟分布Fig.6 Power delay profile of different Rxpositions
由以上对功率及时延状况的分析可知,在无人机位置固定的情况下,地面接收机位于不同位置时接收功率差别较大。因此,为了保证地面接收机周围一定范围内的信号强度尽可能大,需要选择无人机的最佳位置。选取无人机位置为某两条街道的交点,高度取50m和100m,对特定高度水平面内的功率覆盖图进行预测。接收功率覆盖情况如图7所示,由图可知:(1)视距路径区域和非视距路径区域存在明显的分界,分界线两侧接收功率的预测值差别较大,即存在阴影线,离发射天线较远的物体的阴影线两侧,接收功率的预测值相差比较明显;(2)发射天线附近障碍物较少时,较强功率值的覆盖区域较大;(3)UAV取不同高度时功率覆盖图相差不大,在预测平面内,功率近似以发射机位置为圆心,呈放射状由强到弱分布,且当无人机高度较低时更加明显;(4)图7(c,d)中将功率在-113~-110dBm之间的位置用蓝色标出这些点大部分位于建筑物边缘,可见建筑物的遮挡使得信号明显衰减。
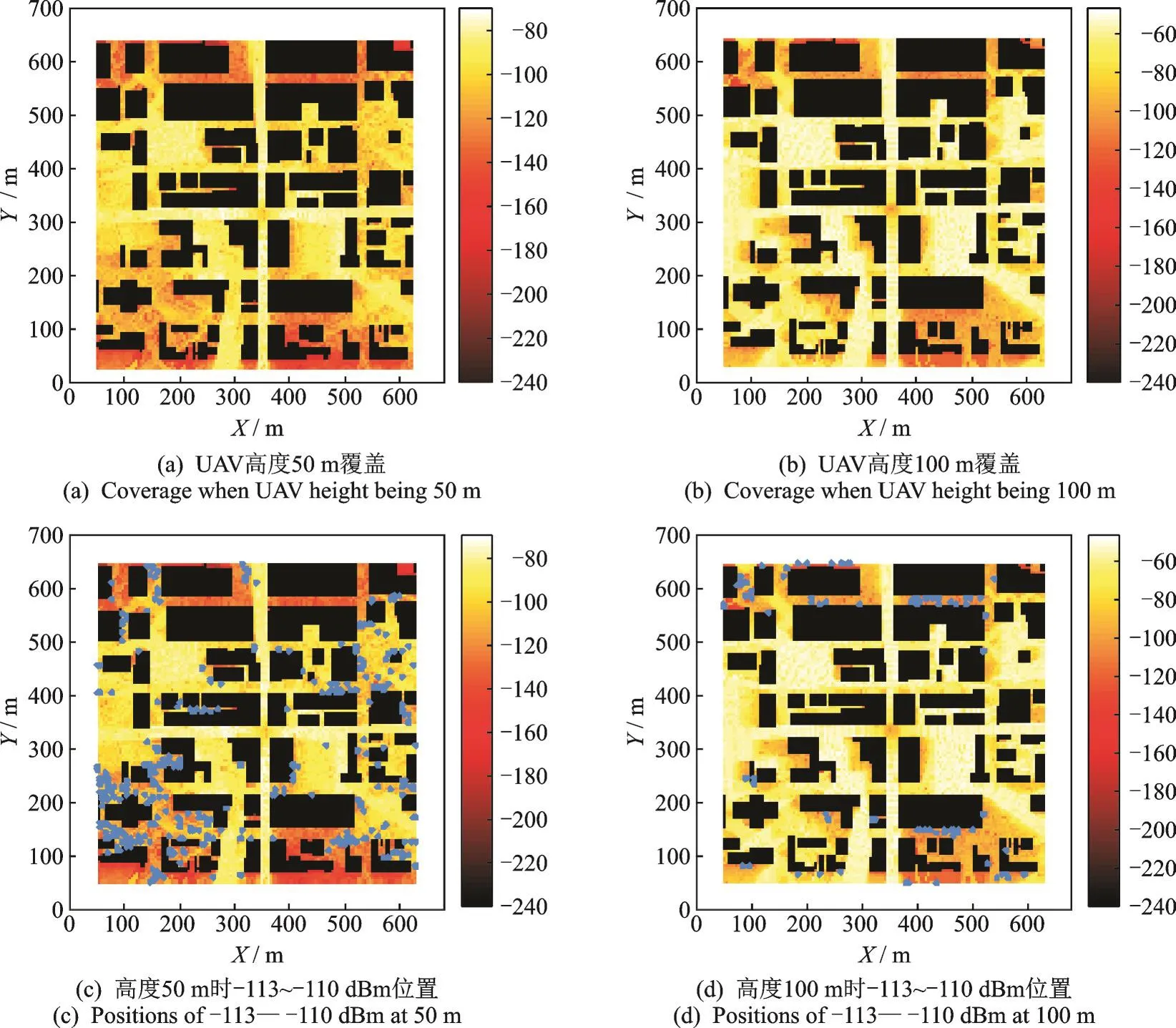
图7 UAV不同高度功率覆盖情况Fig.7 Power coverage prediction of different UAV height
4 结束语
区别于基于统计特性的传统信道模型,结合GSCM与RT构建了一种新的UAV基站-地信道模型,该模型考虑功率最高的几种传播路径,将传播路径分为LoS、一次散射路径和二次散射路径。此外,给出了传播损耗及3种路径的功率计算方法,根据射线跟踪法,针对不同路径,需要沿路径推算。同时,对城市建筑物进行简化,仿真分析了渥太华场景下UAV基站-地信道的传播路径、功率延迟分布和功率覆盖情况。仿真结果表明,城市场景中的密集建筑物会明显减弱接收信号,在建筑物的背面会形成阴影区,且地面接收机即使短距离的移动也会导致传播路径发生较大变化,从而功率延迟分布也产生较大变化;提出的模型能够准确预测传播状况,且功率覆盖结果表明,无人机基站应适当降低高度,可以用于评估及优化无人机部署,为设计无人机通信信道提供参考。因此,利用射线跟踪法及仿真软件能够准确复现城市传播环境及传播状况,有效弥补了实测耗费人力物力的不足。
猜你喜欢
导航定位学报(2022年1期)2022-02-17
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
中国计算机报(2020年9期)2020-03-25
中学生数理化·七年级数学人教版(2019年12期)2019-05-21
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2017年7期)2017-11-24
汽车与安全(2017年9期)2017-09-29
居业(2017年5期)2017-07-24
中成药(2017年3期)2017-05-17