
机器人用永磁同步电机的双自由度控制
2019-12-24 02:41任虹霞
微电机 2019年11期
任虹霞,王 桐
(西安微电机研究所,西安 710077)
0 引 言
永磁同步电机(PMSM)具有结构简单、体积小、重量轻、效率高、过载能力大等优点,利用id=0矢量控制思想PMSM能够实现直流电机的控制特性。永磁同步电机由于其自身的结构及运行特点,成为了各种机器人装备的首选。伺服驱动系统性能的好坏直接影响到机器人系统的控制性能。机器人专用伺服驱动系统必须面对负载惯量变化大、扰动负载大的应用特点。经典的双环PID控制器无法同时满足快速跟踪给定,强抗外部扰动性能的要求。针对给定和外部扰动不同过程通道存在的耦合作用,设计性能良好的多变量PID控制器是一个难点。通常采用3种设计策略:分散PID控制(多回路控制)、全矩阵PID控制、解耦加分散PID控制。采用前两种策略后,过程通道间一般仍然存在一定的耦合作用,调整其中一个通道的控制可能会使其他控制通道的性能恶化,第3种策略通过解耦降低了通道间的耦合,解耦后各回路可以采用单回路PID方法设计,整定参数较少。
在伺服驱动系统的设计过程中,目标值跟踪特性和外扰抑制特性是设计者关注两个主要问题。在过去的控制中,定值系统强调外扰抑制特性,随动系统强调目标跟踪特性,两种特性均要求十分严格的场合比较少见。但是在机器人的应用领域,同时要求目标值跟踪特性和外扰抑制特性。针对上述的问题,提出了一种基于解耦加分散的双PID双自由度控制。
1 伺服电机id=0矢量控制模型
永磁同步电机矢量控制的实质就是通过对定子电流的控制来实现电机的转矩控制。通过磁场定向,可以获得良好的去耦特性,采用id=0矢量控制,可以使得电磁转矩随着iq的变化而变化,在基速以下,驱动系统中只要控制q轴电流的大小就能控制转矩和转速。定子电流is在dq0坐标系上的投影可以通过Clarke变换和Park变换求得,因此id,iq是直流量。永磁同步电机的定子和转子通过气隙磁场进行机电能量的转换,所以存在电磁耦合关系,可获得三相永磁同步电机的转矩方程为:
Tm=P(ψdiq-ψqid)=P(ψfiq-(Ld-Lq)iqid)
(1)
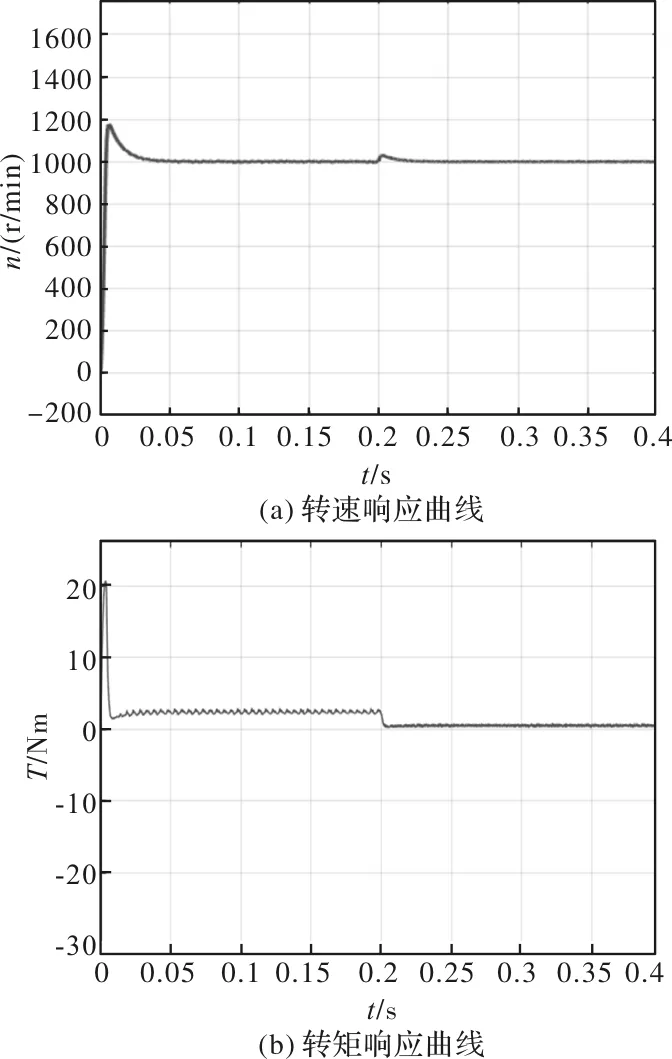
上式说明了转矩由两项组成,括号中的第一项是由三相旋转磁场和永磁磁场相互作用所产生的电磁转矩;第二项是有凸极效应引起的磁阻转矩。我所采用交流伺服电动机是采用嵌入式转子,Ld Tm=Pψfiq=Pψfisβsinβ (2) 当三相合成的电流矢量is和d轴的夹角β等于90°时,可以获得最大转矩,也就是is和q轴重合时转矩最大。因为是永磁的转子,ψ是一个不变的值,所以上式说明了只要保持is和d轴垂直,就可以象调节直流电机控制那样,通过调整直流量iq来控制转矩,从而实现三相永磁同步电机的控制参数的解耦,实现三相永磁同步电机转矩的线性化控制。 当采用id=0控制策略时,定子电流中只有交轴分量,且定子磁动势空间矢量与转子永磁体产生的磁场空间矢量正交,此时定子电流只有转矩分量,定子电压方程可以改写为 (3) 转矩方程则可以改写为 Te=Piqψpm (4) 由上述公式的推导可以看出,三相永磁同步电机采用转子磁链定向控制时就可以获得和直流电机调压调速相同的性能。根据上述公式在Matlab中建立PMSM的d-q轴参数数学模型如下:[2] (5) 两自由度的基本概念是由I.M.Horowitz在1963年提出,传统的伺服驱动系统广泛采用的PID调节器只能设定一组控制参数(一自由度控制)控制结构如图1所示。在这种控制中,PID参数的调整是坚固“外扰抑制特性”和“目标跟踪特性”进行折中处理,因此得不到理想的控制特性。在实际的伺服驱动系统中,确实存在两种最佳控制参数,一种是使“外扰抑制特性”为最佳的参数;另一种是使“目标跟踪特性”为最佳的参数。所谓双自由度PID控制,就是对上述两种参数分别独立地进行调整,是“外扰抑制特性”和“目标跟踪特性”同时达到最佳。外部扰动响应(FB反馈控制)是根据控制对象的特性,来决定FB控制稳定性的上限。指令响应(FF前馈控制),如果注意操作量的饱和,则对稳定性没有约束。 图1 一自由度控制 图2 外部扰动响应 从图2上看,若按干扰抑制特性最优整定参数,则目标值跟踪特性差;若按目标值跟踪特性最优来整定参数,则干扰抑制特性差,针对这一问题国外提出了双自由度控制的思想,其控制结构如图3所示。 图3 双自由度控制结构示意图 设计一个前馈型双自由度的PID控制器,其结构框图如图4所示,使得驱动系统对阶跃扰动输入和阶跃参考输入成为希望特性。即对阶跃扰动输入的响应具有较小的峰值,并且最终能趋于零,系统的稳态误差为零;对阶跃参考输入的响应呈现较小的过调量,调整时间短。 图4 前馈型双自由度PID控制器的结构框图 此时闭环传递函数为 (6) 当F(S)=1/GP(S)时,即H(S)=1,可以使输出完全复现输入信号[5],并且系统的暂态和稳态误差都为零。此时 扰动值D到输出量Y的传递函数为 (7) 给定值R到输出量Y的传递函数为 (8) 为使系统的干扰抑制特性最佳,得到干扰抑制的算法 (9) 式中,1/α为微分增益(一般取0.1≤α≤1.0)。 为使给定值跟踪特性最佳,得到对设定值控制的算法 (10) 从上式可看出系统的两个闭环传递函数只与控制对象和扰动对象相关,是相互独立的,故为双自由度系统。为了简化系统分析,本文在速度环使用了此双自由度模型。 本文在Matlab中针对整个系统进行建模,控制目标是80ST小惯量永磁同步电机,参数如表1所示。 表1 系统参数表 为了对比整个系统的控制性能,先使用了经典的PID算法,系统额定转速1000 r/min时,按抗扰动特性最佳整定控制器参数,0.2 s时负载转矩由2.3 Nm变为0.5 Nm,转速和电磁转矩响应曲线如图5所示。同样条件下,使用前馈型双自由度PID控制算法,取α=0.1进行仿真得到转速和电磁转矩响应曲线如图6所示。 由图5、图6可见,前馈型双自由度PID系统电磁转矩的输出快速的跟随了负载转矩的变化,克服了经典PID系统的超调和振荡,保持了良好的抗扰性能,加快了响应速度。 图5 经典PID 算法 图6 前馈型双自由度的PID算法 由上图6可见。前馈型双自由度PID系统输出转矩快速跟随了负载的变化,克服了原系统的超调和振荡,保持了良好的抗扰特性,响应加快。然后改变初始条件,带负载2 Nm起动,速度给定在0.2 s处阶跃1000 r/min下降至500 r/min,所得结果如图7和图8所示。 图7 经典PID 算法 图8 前馈型双自由度PID算法 由图7和图8对比分析可见,当速度给定变化时,经典PID系统转速调整时间长,系统的给定跟踪特性差。而采用了双自由度PID控制算法后,显著降低了系统转速跟踪时间,系统跟踪特性达到了最佳,表明双自由度PID对给定参数变化和负载扰动具有很强的鲁棒性。 双自由度控制就是“完全分离”了前馈控制和反馈控制。本文将双自由度PID控制算法引入到了永磁同步电机伺服驱动系统中,充分利用了它的优点,在保持外部扰动响应最优状态的同时,可以改善指令响应。这样高速动作和振动抑制可以分开单独调整,是伺服系统的参数整定更加容易。对比经典PID控制算法,双自由度控制在负载发生变化时有较高响应性。这样驱动系统在机器人的应用中能够应对较大的惯量变化。2 双自由度控制PID




3 仿真结果比较分析




4 结 语
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年6期)2022-01-17
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
