基于SMC和AFEKF的PMSM无传感控制*
2019-12-20 02:10吴宇航孟祥宾李紫豪
传感器与微系统 2019年1期
朱 军, 吴宇航, 孟祥宾, 李紫豪
(河南理工大学 电气工程与自动化学院,河南 焦作 454000)
0 引 言
电机无位置/速度传感器控制是永磁同步电机(permanent magnet synchronous motor,PMSM)在高性能驱动系统中的一个重要发展方向[1]。随着20世纪70年代以来,无传感技术[2]飞速发展,常用的电机无传感几种方法中[3~9],卡尔曼滤波(Kalman filtering,KF)是一种线性无偏的最小方差估计算法[10],在电机的无传感控制中,大多采用传统的扩展卡尔曼滤波(extended Kalman filtering,EKF)算法,针对EKF可能会出现的滤波发散的情况,文献[11]提出了在EKF的基础上加入渐消因子,使当前信息所占的比重增大,减小了陈旧信息的影响,使算法更加精确;Sage-Husa自适应滤波[12]原理简单、实时性好,在惯性导航中应用广泛。
目前,转速调节器均采用比例积分(proportional integral,PI)调节器或改进的PI调节器,针对基于EKF的无传感器系统的转速控制策略研究还较少。速度控制器除了要求响应快、精度高和调速范围广外,还要求对负载扰动和系统参数变化具有较强的鲁棒性。滑模速度控制器(sliding-mode speed controller,SMC)作为一类特殊的非线性控制策略[13],在外界扰动或参数变化时会发生抖振现象,文献[14]提出了一种基于新型指数趋近律的滑模控制,有效地抑制了滑模控制器固有抖振问题,增大了趋近速度。
因此,本文根据传统EKF滤波易发散和实时性差的问题,提出了一种基于Sage-Husa自适应滤波器,并加入渐消因子的自适应扩展卡尔曼滤波(adaptive fading EKF,AFEKF)方法来预测转子的位置和速度。并针对传统PI速度控制器的速度超调及滑模控制会出现的抖振情况,设计了一种改进的基于指数趋近律的滑模控制器。
1 系统模型
1.1 数学模型
本文PMSM用于EKF数学模型选择在α—β静止坐标轴系以避免d—q坐标系在建模时产生非线性和增加计算时间,电流状态方程为
(1)
式中iα,iβ分别为α—β坐标下的定子电流;Rs,Ls,ψf,ω,θ分别为电机的定子电阻值,定子电感,转子永磁磁链,转子电角速度和转子位置角。
1.2 状态方程
状态方程描述状态向量的行为。本文定义状态向量为x=[iαiβωθ]T,则本系统对应的非线性方程表述为x(t)=f[x(t)]+Bu(t)+w(t),进行线性化并离散
Xl=Φk,k-1Xk-1+BUk-1+Wk-1
(2)

1.3 观测方程
观测方程是用来描述状态向量和观测值之间的关系。因为α—β轴系的定子电流值是较易测量的电机参数,所以将y=[iαiβ]T作为输出变量,系统对应的非线性方程为y(t)=h[x(t)]+v(t)。其线性离散方程为
(3)

2 SMC控制器
2.1 新型趋近律

对于指数趋近律,可通过增大k值的同时减小ε值加速趋近过程同时减小抖振,但因为存在较大的k值与等速项εsgn(s),使系统并不能在理论上消除抖振。为了克服指数趋近律的缺点,本文设计了一种新型变指数趋近律

(4)
式中 -ε|x|sgn(s)为变速项,-ks为指数项。当系统的状态变量距离平衡点较远时,系统主要以变速和指数两种方式快速趋近滑模面。当系统的状态变量与滑模面的距离较近时,指数项趋近于零,这时变速项起主要作用。当系统的状态量在稳定的状态下趋近于零时,由于滑模控制率的作用使状态变量x进入滑模面并向原点运动,此时的变速项-ε|x|sgn(s)将不断减小,最终稳定在原点,使得造成抖振现象的变速项系数为零,从而抑制抖振现象。
2.2 滑模速度控制器设计
为了便于滑模速度控制器的设置,在d—q坐标系下建立永磁同步电机的数学模型
(5)

对于表贴式PMSM,采用id=0的转子磁场定向控制可获得较好的控制效果,可获得如下数学模型
(6)
(7)

(8)

2.3 系统稳定性分析
为了分析滑模控制器的稳定性,定义Lyapunov函数为
(9)
由于ε>0,k>0,保证了SMC稳定性的条件<0,从而能保证系统能稳定进入滑膜状态。
3 AFEKF算法
EKF算法的缺点为实时精度不够和容易发散。为此,本文提出了一种基于Sage-Husa的AFEKF算法。
针对EKF用于估算PMSM的速度和位置可能会存在滤波发散的情况,本文根据文献[11]采用加权衰减记忆滤波法,采用新的滤波算法加重了当前信息的比重,增大了对陈旧信息的遗忘,充分利用了新数据所包含的信息,以此来抑制滤波的发散。本文在EKF的基础上,引入一个渐消因子s2,使EKF算法中一步预测均方差和滤波增益公式变为
(10)

针对EKF通过试凑得到系统噪声Q和观测噪声R,在滤波估计过程中认为其固定不变,故在实际中存在实时性差和性能不佳的问题,本文引入基于Sage-Husa的自适应滤波器,在估计滤波的同时,利用观测数据的信息来进行递推,对滤波器噪声统计特性不断地进行在线实时估计和修正,进而提高滤波精度,得到估计状态的最优值。但直接使用该方法,容易使噪声统计二阶矩阵的估计k,k失去半正定性和正定性,导致滤波发散。有文献[16]指出R和Q不能同时被估计,只能在Q(R)已知时估计出R(Q),否则由迭代递推出来的估计值与实际值会存在一个常值误差。而又由于输出方程式是线性的,不需要进行线性化计算,可将观测噪声当作零均值的高斯白噪声。因此,可得出简化的Sage-Husa滤波器
(11)
(12)
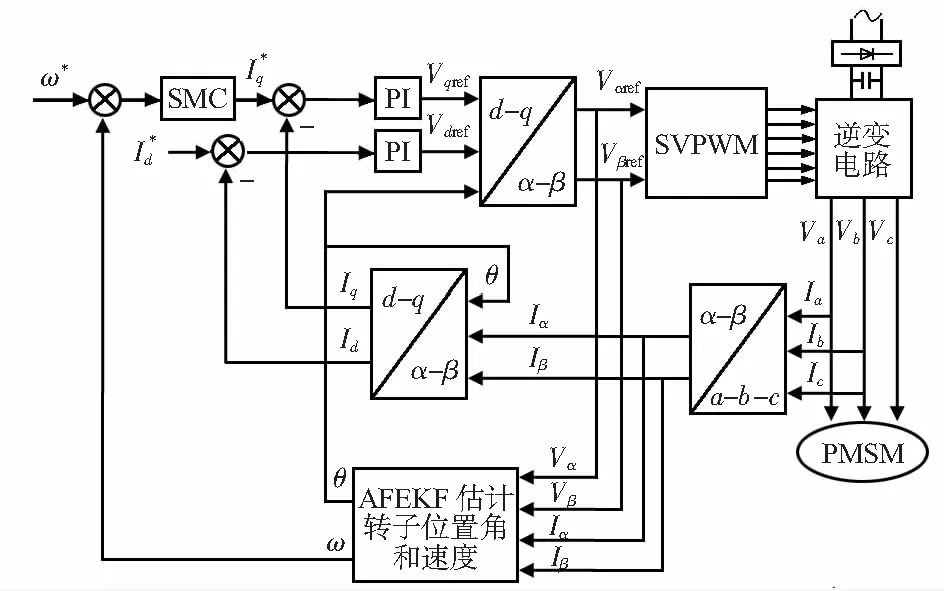
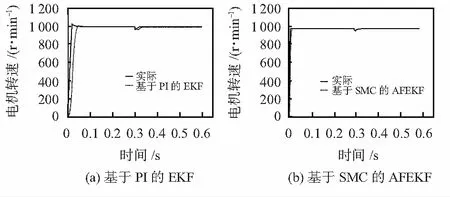
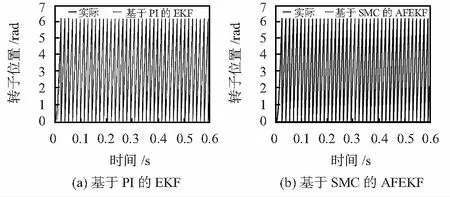
式中 E[ωk]=qk,E[(ωk-qk)(ωj-qj)T]=Qkδkj,dk=(1-b)/(1-bk+1),0 本文采用的基于Sage-Husa的AFEKF算法,主要是通过估计噪声方差与加入渐消因子相结合的方法,推算出最佳稳态增益矩阵Kk,使得增益矩阵Kk不断地与实际观测值相适应,并且在保证实时性的同时,最大程度地提高收敛速度,从而得出最优估计值k。具体的实现过程如图1所示。 图1 简化Sage-Husa的AFEKF算法的实现流程 无论是EKF还是AFEKF在对初始状态参数选择时,卡尔曼滤波增益K的计算与Q,R,P有关。而Q和R取值选择会极大影响系统估计精度及算法收敛性。通常情况下Q和R都是未知的,只能根据系统噪声和测量噪声不断试凑确定其的取值。初始设定与实际值可能有误差,但随着滤波步数的增加,新观测值的权重增大,其滤波输出值会逐渐接近系统的真实状态,而初始值误差的影响也会随着系统程序的运行逐渐消失;P0应选择一个较大的数;在整个估计中,AFEKF要保持观测噪声方差Rk=R0,这要求对观测值先验信息了解的边角充分且准确。本文根据前人的经验,经反复实验最终确定初始状态参数:x0=[0 0 0 0],P0=diag[0.5 0.5 200 5],q0=diag[0 0 0 0],R=diag[0.5 0.5],Q=diag[0.25 0.25 10 0.01]。 图2为基于SMC和AFEKF的PMSM无传感器控制系统框图。本系统采用id=0控制策略,其控制结构是外环为转子速度环,内环为电流环的双闭环。其中内环控制器的输出信号Ud和Uq经过Park逆变换得到Uα和Uβ,电机相电流Ia,Ib和Ic经过Clack变换得到的Iα,Iβ。将Uα,Uβ,Iα和Iβ作为AFEKF模块的输入信号,并估算出转子位置角θ和速度ω,作为矢量控制的反馈控制。 图2 基于AEKF的PMSM无传感器控制系统框图 MATLAB中建立如图2的仿真平台,电机用MATLAB中自带的PMSM模型,电机参数分别为:Rs=2.875 Ω ,Ls=0.008 5 H,pn=4,ψf=0.175 Wb,J=0.000 8kg·m2,转子初始位置为0。本文分别对基于PI速度控制器的EKF和基于SMC速度控制器的AFEKF两种算法进行仿真实验:预定转速为1 000 r/min,在0.3 s时由空载突加负载5 N,仿真持续0.6 s。图3为基于PI和EKF算法与基于SMC和AFEKF算法的系统转速波形;图4为2种算法的转子位置仿真波形。 图3 2种算法的转速曲线 图4 2种算法的转子位置 由图3可以看出,当电机由静止启动达到预定转速时,采用PI转速控制器的EKF无传感系统在初始阶段转速有超调、上升时间长,追踪效果较差,采用SMC转速控制器的AFEKF无传感系统在初始阶段转速无超调,响应快,追踪效果好;在达到预定转速保持稳定状态的0.3 s中,2种算法与实际转速均相差不大,误差范围在0.1 %以内;在0.3 s时突加负载5 N,图5为加载后0.3~0.6 s,2种方法与实际值的误差曲线,可以看出,采用SMC速度控制器的AFEKF相比PI速度控制器的EKF在突加负载时转速跌落较小,能更快更精确地追踪实际转速,速度估计按正弦规律收敛于实际转速,而基于PI速度控制的EKF在加载后更久达到稳定转速,且转速有所跌落,本文所提出的新算法最大速度偏差比传统算法减小了1.77 %,且稳定状态下转速误差下降了0.371 %。由图4可以看出,在启动和加载时基于SMC的AFEKF相比基于PI的EKF在位置估计精度更高,对图4局部放大,可以明显看出在同一时间内,新算法的位置估计准确度更高,最大位置误差比传统算法减小了0.45 %,更接近实际值。 图5 2种算法与实际转速的误差对比 本文为了使PMSM无传感控制更精确地估计速度、位置,提出了AFEKF算法,仿真结果表明,SMC和AFEKF性能均优于PI和EKF,且本文算法可以达到对历史统计数据的遗忘,又能应对PMSM运行过程中参数变化、环境噪声的影响,对电机速度、位置估计更精确。
4 实验与结果分析
4.1 模型框图
4.2 结果分析

5 结 论
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04
军事文摘(2018年24期)2018-12-26
北京航空航天大学学报(2017年4期)2017-11-23
中国化妆品(2017年12期)2017-06-27
北京航空航天大学学报(2016年7期)2016-11-16
太空探索(2016年7期)2016-07-10
北京航空航天大学学报(2016年4期)2016-02-27
海军航空大学学报(2015年1期)2015-11-11
太空探索(2015年8期)2015-07-18
空间控制技术与应用(2015年3期)2015-06-05