轨道涡流对磁浮车辆头部悬浮间隙传感器的影响*
2019-12-20 00:52罗茹丹李中秀
传感器与微系统 2019年1期
罗茹丹, 吴 峻, 李中秀
(国防科技大学 智能科学学院,湖南 长沙 410073)
0 引 言
常导中低速磁浮列车采用无接触的电磁悬浮和直线牵引原理,以其无磨损、噪音低、安全、平稳、舒适等优点而受到了广泛关注,在运行过程中,悬浮系统控制车厢始终与轨道之间保持在8~10 mm左右的悬浮间隙,悬浮间隙检测由悬浮间隙传感器完成。悬浮间隙传感器安装于电磁铁的端部和F型轨道中间,处于在F轨下部,是一种高频反射式电涡流位移传感器[1~3],是悬浮控制系统实施主动控制的关键检测部件。为了保证车体的正常稳定运行[4~6],悬浮间隙传感器必须为悬浮控制系统反馈可靠、实时间隙信息[7]。
中低速磁浮轨道通常采用无叠片F型钢轨,在运行过程中,车辆底部的悬浮电磁铁与轨道发生相对运动,轨道中会感应出涡流(简称为F轨涡流),研究[8~11]表明,F轨的这种涡流现象造成了悬浮力的下降,并随着速度的升高而增大,且越靠近车辆头部越明显。运动电磁铁引入的涡流在电磁铁两端所对应的轨道处表现较大的密度,而在电磁铁中间所对应的轨道处表现较小的密度,且两端的涡流方向相反,车辆运动前端的轨道涡流削弱悬浮磁场,而后端的轨道涡流则加强悬浮磁场[12]。
外界环境中的电磁场会对电涡流传感器造成影响[13~17],但被测导体中存在的涡流对传感器检测的影响研究不多,特别是这种运动电磁铁引入的F轨涡流对悬浮间隙传感器的影响研究更少,目前尚无文献展开分析研究。
本文对车辆头部悬浮电磁铁进行了有限元仿真,分析了车辆运动引入的涡流,仿真了悬浮间隙传感器检测线圈正对F轨检测面的涡流及磁通密度情况,并探究了F轨涡流对车辆头部悬浮间隙传感器的影响。
1 轨道涡流情况仿真
根据北京中低速磁浮S1线的磁浮列车情况,其最高运行速度设计为100 km/h,由文献[10,11]可知F轨的涡流情况与列车的运行速度呈正相关,即速度越高,F轨涡流效应越明显,对悬浮间隙传感器造成的影响可能越大,因此,本文主要分析讨论时速100 km/h条件下F轨涡流对悬浮间隙传感器的影响。
悬浮电磁铁模块3D模型如图1所示。一个悬浮电磁铁模块由四个悬浮电磁铁线包组成,上方是导轨,下部是由极板、铁芯、和线圈组成的电磁铁,中间部分是悬浮间隙为9 mm(定义悬浮间隙为电磁铁极面与轨道下极面之间的距离),线圈电流40 A,匝数为384,轨道、极板和铁芯采用Q235材料,线圈材料为铝,运动对象为轨道,仿真轨道向z轴正方向运动。根据相对运动原理,电磁铁相对轨道向z轴负方向运动。

图1 悬浮电磁铁模块三维仿真模型
检测线圈设置为距离轨道下表面13 mm的原因是,为了防止电磁铁处于吸死轨道状态时,传感器的检测探头线圈不会碰到轨道而受损,电磁铁与轨道贴住时,传感器的检测探头与检测的轨道面之间依然保留4 mm间隙,这样,当悬浮间隙为9 mm时,传感器的探头线圈距离检测的轨道面之间就是13 mm。
悬浮间隙传感器由于是一种高频反射式电涡流传感器,检测磁场在F轨表面所形成的涡流。由于趋肤效应,涡流的渗透深度很薄[18]。参照渗透深度的计算式(1),激励频率为2 MHz,硅钢片电导率为5×106S/m,相对磁导率为7 000~10 000,计算得到悬浮间隙传感器检测涡流形成的趋肤深度约为0.006 mm,即
(1)
为探究F轨涡流对悬浮间隙传感器的影响,根据所计算的趋肤深度,选取模型中距离悬浮间隙传感器正对应的F轨下凹表面0.006 mm的面为分析面。悬浮间隙传感器装有三个检测线圈,其与电磁铁的相对位置如图 2[19]。
为方便讨论,如图3所示,沿x方向在悬浮间隙传感器的每个检测线圈中心各取了一条参考线,仿真分析这些位置轨道下表面0.006 mm处的F轨涡流情况。结果如图4所示,图中6条曲线分别为时速为100 km/h下6处参考线位置的涡流侧向分量Jz。
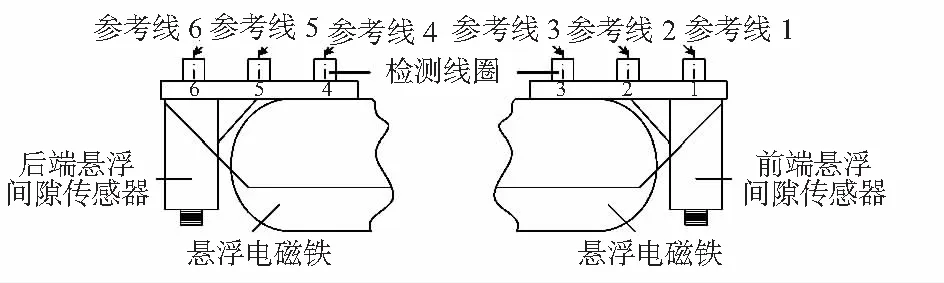
图2 悬浮间隙传感器与悬浮电磁铁的相对位置
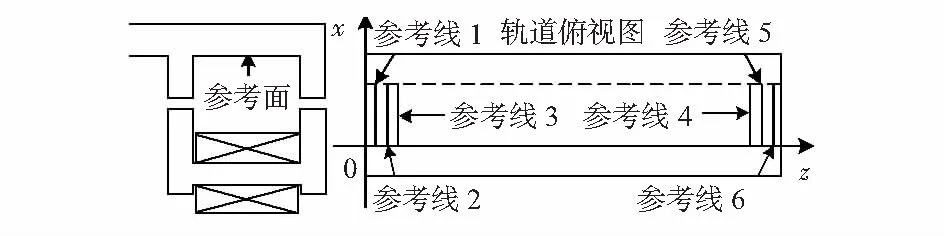
图3 参考线位置示意

图4 时速100 km/h涡流仿真
由图 4可知,前端悬浮间隙传感器检测线圈3和后端悬浮间隙传感器检测线圈6位置的涡流现象最明显,且两端涡流方向相反。仿真参考线3中心处的涡流磁场频率,达到100 Hz左右,因此该F轨涡流为一种低频涡流。
在此基础上,仿真参考线3和参考线6的由涡流侧向分量Jz产生磁通密度侧向分量By的变化情况,结果如图 5所示。因为前端F轨涡流产生磁通密度方向向上,与悬浮间隙传感器检测线圈激励产生涡流是正向作用叠加,而后端F轨涡流产生磁通密度方向向下,与悬浮间隙传感器检测线圈激励产生涡流是反向作用叠加。前后端比较而言,前端F轨涡流更大,导致前端的磁通密度变化比较大。静止时的相同参考面的磁通密度仿真情况如图 5(b)所示,比较可知因为涡流的影响,使得轨道下表面最大磁通密度变化达到了0.23 T。

图5 磁通密度仿真情况
2 轨道涡流对悬浮间隙传感器影响的仿真分析
如图 6所示,为了进一步分析F轨涡流对悬浮间隙传感器的影响,在悬浮电磁铁模块两端悬浮间隙传感器检测线圈3和检测线圈6的位置增加两个检测线圈,如前所述,z坐标比较小的检测线圈为前端悬浮间隙传感器检测线圈,该线圈激励电流频率为2 MHz,线圈距离轨道下表面13 mm,仿真时速100 km/h时悬浮间隙传感器所对应的F轨检测面处的磁通密度分布。检测线圈设置为距离轨道下表面13 mm的原因是,为了防止电磁铁处于吸死轨道状态时,悬浮间隙传感器的检测探头线圈因碰到轨道而受损,电磁铁与轨道贴住时,传感器的检测探头与检测的轨道面之间依然保留4 mm间隙,这样,当悬浮间隙为9 mm时,传感器的探头线圈距离检测的轨道面之间就是13 mm。

图6 仿真模型示意
图7为对应的检测线圈等效电感量值的变化。由图可知,F轨涡流导致了前后端传感器线圈电感值都发生了波动,最大前端传感器发生大约0.065 μH幅值的变化(相对变化1.57 %),且时速100 km/h下的前端传感器线圈与静止时相比,其电感在发生波动的同时,值也有所下降,但后端传感器线圈电感值变化不明显,这是因为在电磁铁的前端引入的F轨涡流比后端更强所致。检测线圈的电感影响越大,传感器间隙检测结果的影响也就越大,检测线圈电感值的变小说明F轨涡流的影响导致悬浮间隙传感器输出测量间隙值偏大。
另一方面,由于F轨涡流是运动导体在恒磁场中切割磁感线而产生,属于低频涡流,而悬浮间隙传感器检测线圈在F轨检测表面形成的是高频涡流。为了分析两种不同频率的涡流叠加影响,如图 8所示,单独建立仿真模型,高频激励线圈中通入2 MHz的高频电流,线圈距离轨道高度与前面仿真模型一致,设置13 mm,为模拟F轨与电磁铁相对运动而产生的涡流情况,阴影部分设为低频激励线圈,通入100 Hz的低频电流,使其在F轨中形成低频涡流,当通入的电流方向与高频激励电流一致时,其表现为两种涡流的正向叠加作用,反之则表现为反向叠加作用。

图8 检测高低频涡流叠加效果模型示意
由于F轨材料的磁导率不是常数,是非线性的磁化曲线,其无法在涡流场进行求解[20],且上文的三维仿真都是在瞬态场进行的,为辅助上文的仿真,仍利用瞬态场分析低频F轨涡流与高频检测涡流叠加后对传感器检测线圈等效电感值的影响,当模型分别为只有高频激励线圈, 高低频涡流正向叠加, 高低频涡流反向叠加时对应的高频激励线圈电感值,分别为4.138 60,4.105 59,4.105 60 μH。
结果显示,低频涡流与高频涡流的叠加导致检测线圈等效电感值的下降,即涡流损耗的增大,减弱高频激励线圈的涡流效果。无论是正向叠加还是反向叠加都将减小线圈的电感值,且两种变化量基本一致。
因为检测线圈与轨道的距离越大,其等效电感值越小,结合上述高低频涡流仿真结果可以得出低频涡流的叠加导致传感器检测的距离偏大的结论,进一步说明了F轨涡流有可能导致悬浮间隙传感器输出测量间隙值偏大的结果。
3 试验与建议
为探究仿真结果的正确性以及悬浮间隙传感器实际受F轨涡流现象影响,对悬浮间隙传感器进行了运行试验。
如图 9所示,在悬浮间隙传感器背部安装的L型支架上安装3只激光传感器,其中2#和3#激光位移计在一条水平线上。通过观测悬浮间隙传感器3只检测线圈探头的输出以及激光位移计3只探头的输出来进行对比。

图9 激光传感器安装示意
试验磁浮车辆设定在7.0 %~7.5 %坡顶的平直段往返运行,由于测试条件受限,试验运行速度为60 km/h,此速度与本文仿真速度100 km/h有一定差距,但因为F轨的涡流现象是随车辆速度的提高而增强的,所以,60 km/h速度条件下的试验结果对本文仿真的验证是合理且可接受的。
从图10的实验结果可以看出,悬浮间隙传感器3只线圈探头输出值均向大的方向漂移了最大约1.5 mm,与前文的仿真结果一致,悬浮间隙传感器因受F轨涡流影响而导致其输出的测量值偏大。

图10 端部试验结果
针对这些影响,提出改善悬浮间隙传感器受F轨涡流影响的几点建议如下:
1)适当延长悬浮间隙传感器探头,使其检测线圈向车辆中间部分移动。F轨涡流的分布情况是两个端部涡流现象比较明显而中间部分则弱一些,取图4参考线3向电磁铁中间位置偏100 mm的位置仿真其涡流情况,仿真值几乎为0 A/m,所以,将悬浮间隙传感器的检测线圈安装位置向中间转移会减弱F轨涡流对悬浮间隙传感器检测的影响。
2)适当增大悬浮间隙。悬浮间隙分别为8,9,9.5 mm的F轨涡流对悬浮间隙传感器检测影响,当列车时速为0 km/h时,对应的仿真电感值分别为4.356,4.138,4.136 μH;当列车时速为100 km/h时,对应的仿真电感值分别为4.310,4.112,4.132 μH。可知,随着悬浮间隙的增大,前端悬浮间隙传感器检测线圈仿真电感下降值逐渐变小,所以,适当地提高悬浮间隙可以在一定程度上减弱F轨涡流对悬浮间隙传感器的影响。
4 结 论
1)由于F轨和电磁铁发生相对运动而切割磁感线,悬浮间隙传感器涡流检测面位置产生了感应涡流,其影响磁通密度变化最大幅值可达0.23 T。
2)F轨涡流导致悬浮间隙传感器检测线圈的电感值会产生呈下降趋势的波动,且涡流越大,电感值下降的越多,使得悬浮间隙传感器输出测量间隙值偏大,试验结果验证了上述结论。
3)针对F轨涡流情况,可将悬浮间隙传感器的检测端向电磁铁模块的中间位置延伸,使检测线圈向其中间位置偏移;并适当地增大悬浮间隙。上述措施可以在一定程度上减弱F轨涡流对悬浮间隙传感器的影响。
猜你喜欢
大电机技术(2022年5期)2022-11-17
小猕猴智力画刊(2022年10期)2022-11-02
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
科学技术创新(2021年22期)2021-08-16
防爆电机(2021年2期)2021-06-09
装备制造技术(2020年11期)2021-01-26
时代农机(2019年5期)2019-08-17
弹箭与制导学报(2018年1期)2018-11-13
通信电源技术(2018年5期)2018-08-23