
基于状态观测器的LQR四轮转向控制
2019-12-17 00:31王薇薇徐灏飞
重庆交通大学学报(自然科学版) 2019年12期
李 伟,王薇薇,徐灏飞
(重庆交通大学 机电与车辆工程学院,重庆,400074)
0 引 言
四轮转向4WS(four-wheel steering)的基本原理是利用车辆行驶中的某些信息来控制后轮的转角输入,以提高车辆的操纵性和稳定性。早在20世纪初,车辆工程师们就发现了在低速工况下,后轮与前轮反向转动时可以有效地减小车辆转弯半径的特点,并将其运用于军用和工程车辆。四轮转向技术在现代汽车(尤其是轿车)中的应用源于对中、高车速下的车辆操稳性和驾驶员主观评价的研究。
近年来,国内外众多学者都致力于解决四轮转向控制系统中,同向危险性及反向控制策略矛盾性问题,并利用各种控制策略设计四轮转向控制器,以达到追踪最佳操纵稳定性[1-3]。在四轮转向车辆控制模型中,质心侧偏角很难用现有传感器进行测量,在基于最优控制的控制器设计时,大多利用状态调节器,对质心侧偏角和横摆角速度与期望横摆角速度的差值进行加权,使性能指标达到最小,以达到质心侧偏角趋近于零,且横摆角速度能追踪期望横摆角速度的目的。现有方法导致在质心侧偏角趋近于零的同时必然降低横摆角速度的追踪效果,笔者在建立四轮转向车辆状态空间模型的基础上,设计一种降维状态观测器对模型中质心侧偏角进行观测,运用极点配置法和线性二次型最优控制LQR(linear quadratic regulator)两种方法设计控制器,对质心侧偏角和横摆角速度两个重要性能参数均进行加权控制,对典型阶跃工况响应和典型单移线工况进行仿真分析。
1 建立四轮转向车辆动力学模型
车辆本身是一个非常复杂的系统,涉及诸如轮胎侧偏、摩擦、间隙等非线性环节。研究四轮转向系统需在建模过程中设定很多假设,一方面能够为研究提供方便,另一方面也能更好的验证控制器设计效果。现做基本假设如下:
1)车辆行驶于平坦路面,即无垂向路面不平度输;
2)不考虑车身的侧倾和俯仰运动,即包括悬架结构在内的车身结构是刚性的;
3)忽略转向系统,将输入直接施加在前后转向轮上;
4)车辆仅受平衡状态(如直线行驶或稳态转向)附近的小扰动,即前后转向轮转角足够小,从而保证车辆运动方程线性;
5)假定车速恒定,即不考虑车辆前进方向的自由度。
根据假设,车辆被简化为一个仅剩侧向和横摆两个运动自由度的经典“二轮自行车”模型,称之为“基本操纵模型”。简化后的四轮转向2自由度模型,如图1。

图1 四轮转向二自由度模型Fig. 1 Two-degree-of-freedom model of four-wheel steering
汽车前后轮侧偏角与其运动参数有关,根据相关坐标系定义,有:
(1)
式中:αf、αr分别为前后轮侧偏角,°;lf、lr分别为前、后轴到质心的距离,m;δf、δr分别为前、后轮转角,°;u为汽车前进方向的速度,m·s-1;r为整车横摆角速度,rad·s-1;β为整车质心处侧偏角,°,即车辆质心的运动方向与汽车前进方向之间的夹角,定义v为汽车质心处的侧向速度m·s-1,则有:
(2)
由图1假设可列出外力、外力矩与汽车运动参数之间的关系式为:
(3)
式中:Fy为侧偏力,N;Mz为外力矩,N·m;,Cαf、Cαr分别为等效前轴侧偏刚度,N·m-1。
根据牛顿-欧拉方程,二自由度汽车运动微分方程式为
(4)

化为标准状态空间模型为:

(5)
需要注意,车辆的质心侧偏角β很难用传感器测量得到,而车辆的横摆角速度可以通过陀螺仪等仪器测量得到,因此,我们认为系统的输出仅为整车横摆角速度r。则在式(5)中,状态向量x,状态系数矩阵A,输入向量u,控制矩阵B,输出向量y,输出状态系数矩阵C,输出控制系数矩阵分别为:
x=[βr]T,u=[δfδr]T,y=r
C=[0 1],D=0
模型的其他参数如表1。
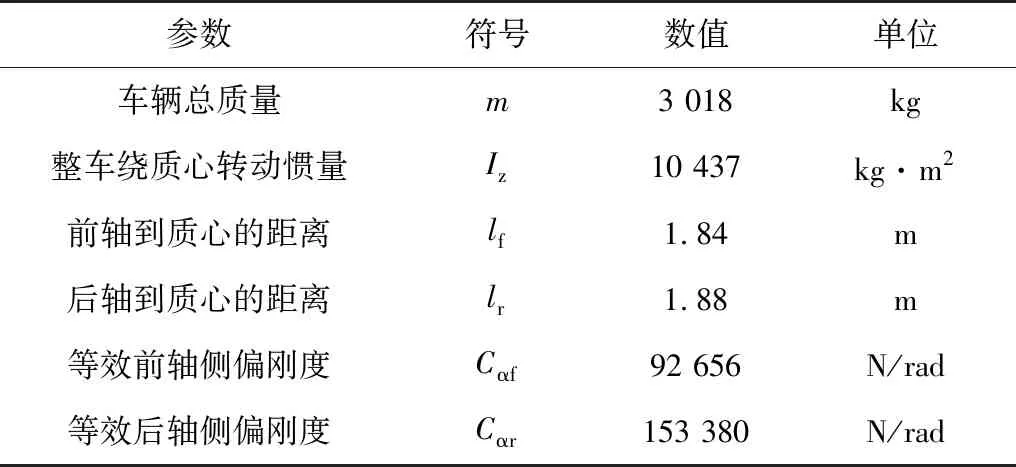
表1 模型参数Table 1 Model parameters
2 系统性能指标
研究中只考虑车辆以较高速度行驶的状态,旨在改进车辆高速操稳性时的四轮转向控制策略,低速时不予考虑(低速时旨在提高车辆转向轻便性,通过前后轮方向转动即可实现)。
车辆前后车轮如果同向转动,产生的车辆质心侧偏角和横摆角速度方向相反,也可验证前后车轮如果反向转动,则产生的车辆质心侧偏角和横摆角速度方向相同,这些结论在各种车速下都是成立的。对比前轮转向与四轮转向,如图2。
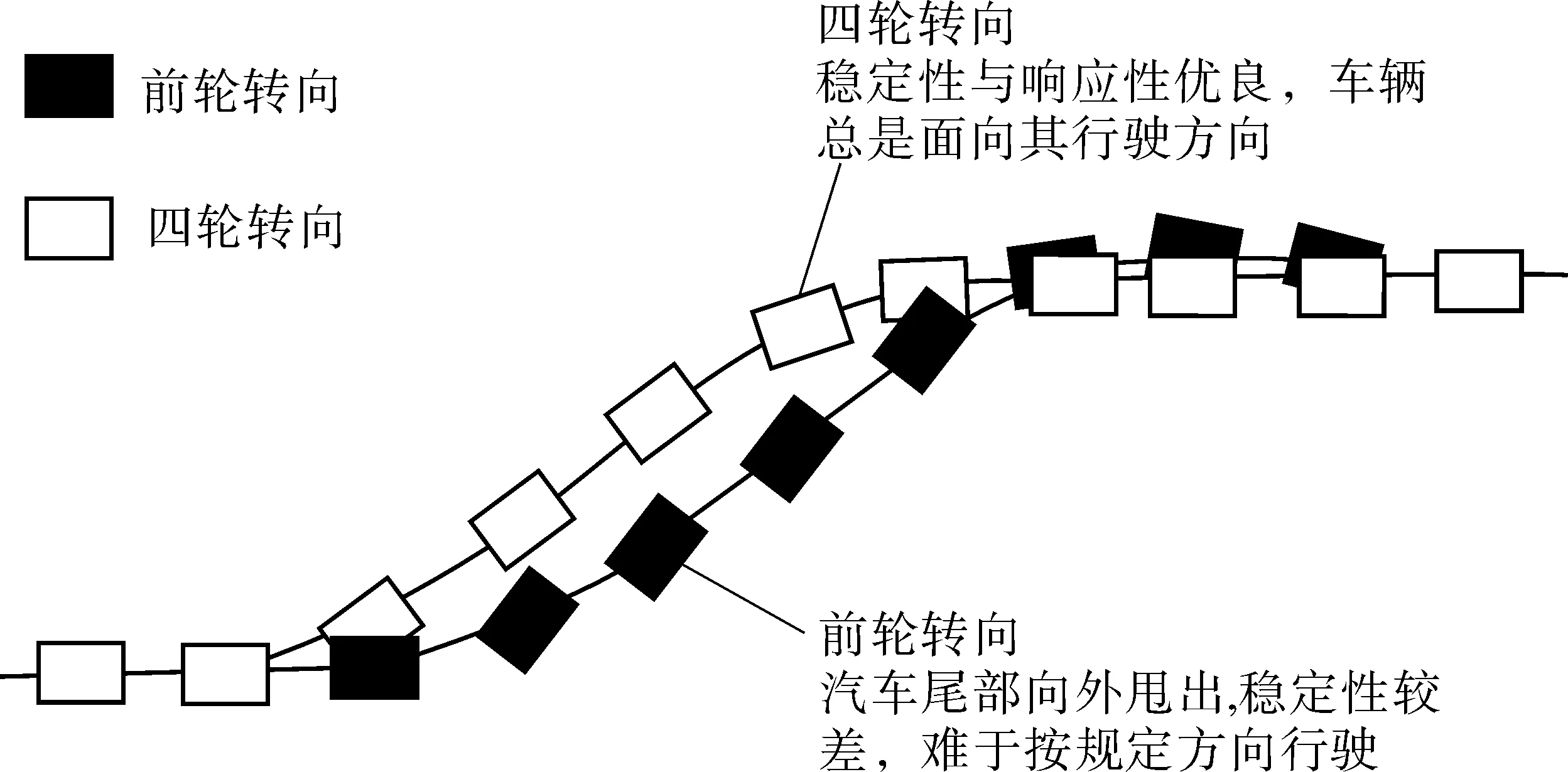
图2 前轮转向和四轮转向对比Fig. 2 Contrast of front-wheel steering and four-wheel steering

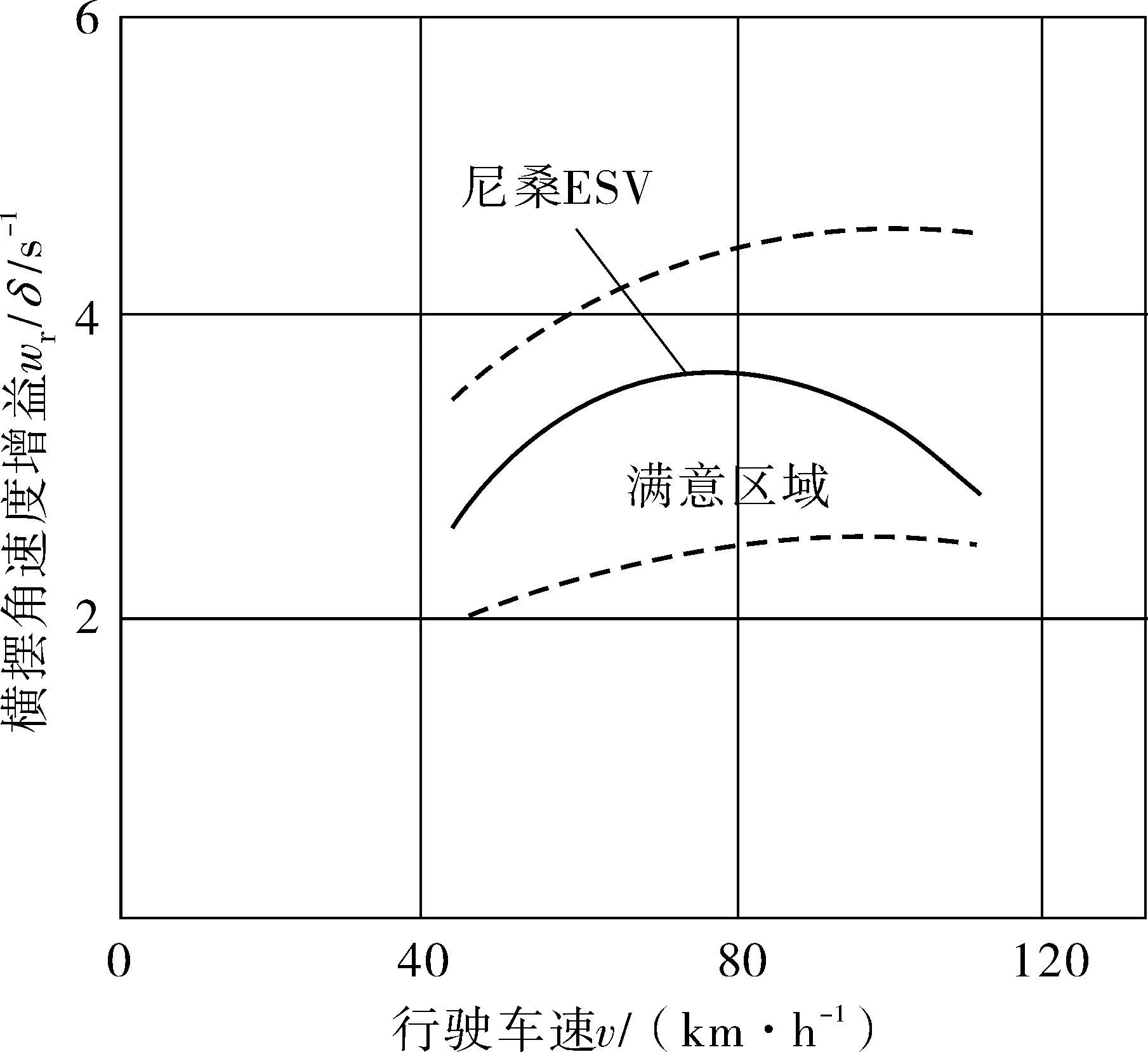
图3 稳态横摆角速度增益的满意区域Fig. 3 Satisfactory area of steady-state yaw rate gain
车辆在高速行驶时,前后轮反向转动是非常危险的情况,因为这会进一步恶化车辆转弯时的操稳性能。当前后轮同向转动时,控制策略存在的矛盾就在于:一方面,同向转动会使车辆的质心侧偏角减小至零附近,有助于提高车辆的路径跟踪能力;另一方面,也有可能使整车横摆角速度降低,从而使驾驶员对转弯时“路感”降低,造成车辆操纵性下降。
当前后轮同向转动相同的角度时,与前轮转动相比整车质心侧偏角变成正值,同时,车辆横摆角速度稳态值基本为零,这种情况下车辆将完全丧失转向能力,斜向前驶离弯道。由此可见,后轮转角控制策略的制定非常关键,制定时如发生前后轮同时转相同角度的情况,不仅不会增加车辆转向时的操控性,反而会恶化操稳性[5-6]。
综上,性能指标可以描述为:在特定车速(25 m/s)和前轮转角(3°)下,通过后轮转角控制策略的实施,使车辆转弯时质心侧偏角响应的稳态值以最好的效果接近于零;同时还需保证车辆的横摆角速度响应的稳态值在满意区间内。前一问题为典型的状态调节器问题,后一问题为典型的跟踪问题。
3 系统状态观测
车辆的横摆角速度可以根据陀螺仪等测得,但整车质心侧偏角的测量很困难,为了实现后期控制器的设计,首先进行系统状态观测。
3.1 判断系统的能观性
当车速为25m/s时,代入相关参数,有:

(6)
因此系统完全能观测。
3.2 系统状态观测器设计
在进行系统状态观测器设计之前,首先求出原系统极点,在MATLAB中输入eig(A),可得原系统的极点为:-3.270 4±3.253 8i。
由于输出变量为系统的一个状态变量,即横摆角速度,因此选择降维状态观测器,观测器极点取为-10,如式(7):
(7)
输出y为x2,因此只需设计一维观测器观测x1即可。

(8)
计算可得g=0.596 7,进一步有:
(9)

(10)
代入数据,有:
(11)
最后采用观测器所得状态变量表达式为:
(12)
对降维状态观测器进行验证,仿真工况为:车速25 m/s,前轮施加3°阶跃激励,后轮施加1°阶跃激励,分别给出仿真直接输出和通过观测器观测输出的状态变量响应曲线,如图4。图4(a)表示仿真直接输出的响应曲线,图4(b)表示观测器观测输出的响应曲线。

图4 仿真直接输出的响应曲线和观测器观测输出的响应曲线Fig. 4 Response curves of simulation direct output and observer observation output
从图4中可以看出,两者的结果吻合的非常好,因此,设计的降维状态观测器能够实现系统状态的观测。
4 反馈控制律设计
线性二次型最优控制(LQR)设计的思路为:车辆以固定车速25m/s行驶,给前轮施加一个固定的阶跃转角取为3°,通过控制后轮的转角以实现车辆的质心侧偏角稳态时接近于0;同时使车辆稳态时横摆角速度在满意区间内。根据图3得出满意的横摆角速度为9°·s-1。
可以将前轮转角视为外界干扰δf,而将后轮转角作为系统的控制输入u,重新列写系统状态方程为:
(13)
式中参数如下,其余参数不变:
4.1 质心侧偏角稳态值接近于零模式
性能指标[7-8]取为:
(14)
控制律为:
(15)
式中,P满足矩阵黎卡提代数微分方程[9]。
(16)
此时,控制律是线性的,即:
u*=-Kx
(17)
选取三组合适的加权矩阵:
分别代入三组加权矩阵进行状态调节器仿真如图5。

图5 质心侧偏角响应曲线和横摆角速度响应曲线Fig. 5 Response curves of sideslip angle of centroid and yaw rate
由三组仿真曲线分析可看出,第二组加权矩阵对应的质心侧偏角相比另外两组加权矩阵更加趋近于期望值0,由于状态调节器的主要目的在于质心侧偏角偏向于0,因此选第二组加权矩阵更为合适,但是横摆角速度并不趋于期望值9°·s-1。
经计算可得,控制律为:
(18)
4.2 横摆角速度趋近期望值模式
取满意的横摆角速度yr=9°·s-1,定义误差向量为e(t)=yr(t)-y(t),性能指标为:
(19)
进而可得:
(20)
根据相关推导[4],最终可得控制律为:
(21)
其中P和g满足:
(22)
选取三组合适的加权系数:
分别代入三组加权系数,进行横摆角速度跟踪仿真如图6。
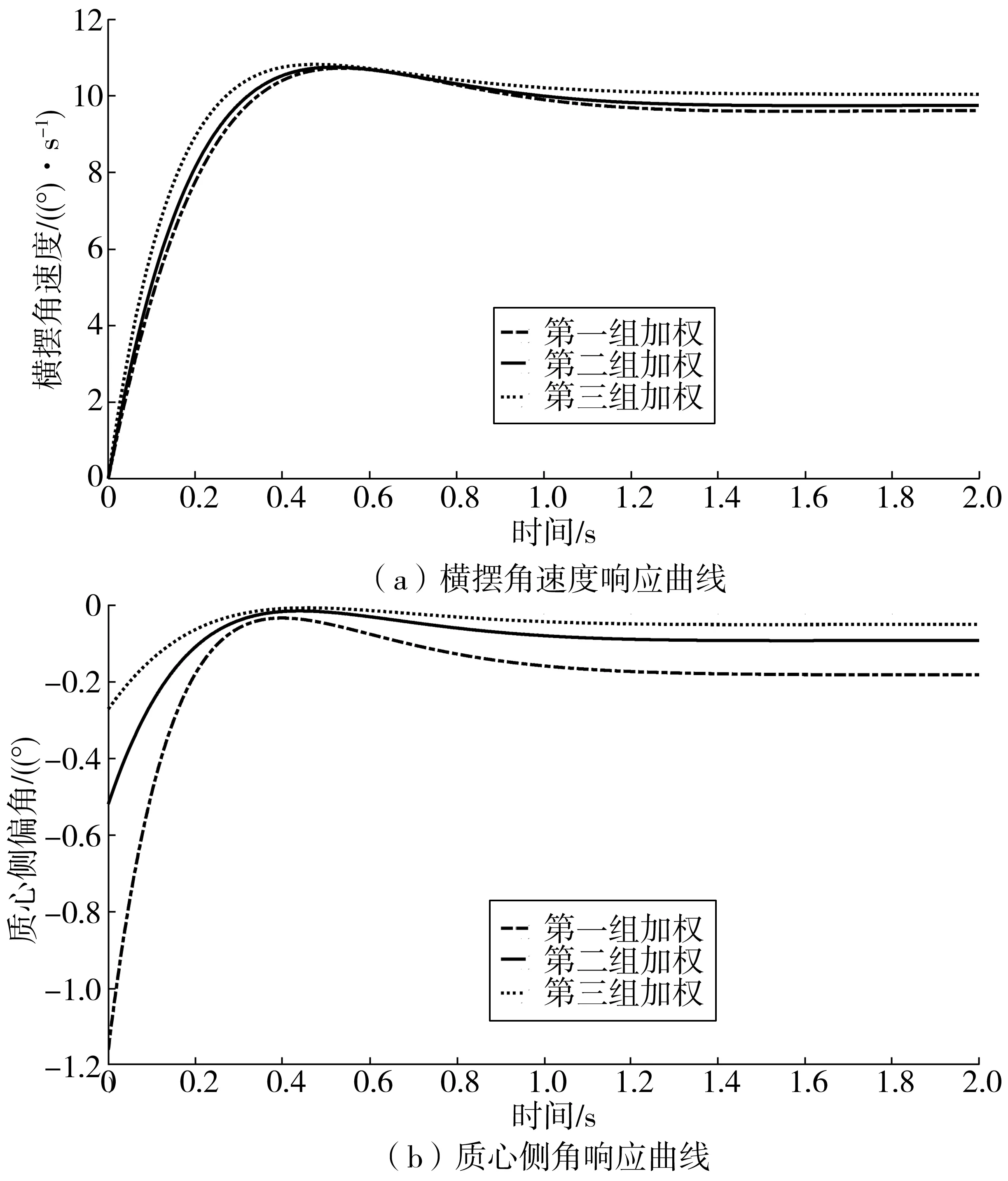
图6 横摆角速度响应曲线和质心侧偏角响应曲线Fig. 6 Response curves of yaw rate and sideslip angle of centroid
由三组仿真曲线可看出,第一组加权系数对应的横摆角速度相比另外两组加权系数更加趋近于期望值9°·s-1,满足横摆角速度追踪期望值的要求。因此选取第一组加权系数,但是质心侧偏角并不趋于期望值0。
经计算可得,控制律为:
(23)
4.3 加权线性二次型最优控制模式
如4.1、4.2所述,采用状态调节器时,车辆质心侧偏角可以稳定在0°附近,满足响应要求,但车辆稳态横摆角速度较小,只有6°·s-1附近;采用车辆目标横摆角速度跟踪法求得控制律时,系统最终的稳态横摆角速度稳定在9°·s-1附近,满足响应要求,但车辆质心侧偏角相对较大,其绝对值达到0.2°附近。
为此,笔者采用两种控制律加权的形式对车辆的后轮进行控制,状态调节器的控制律为:
(24)
横摆角速度跟踪的控制律律为:
(25)
最终的加权控制律取为:
(26)
在给定的25 m/s工况下,输入方向盘3°阶跃,不断调节加权控制率参数k1和k2,使得质心侧偏角趋近于0,同时使得横摆角速度趋近于期望值,达到最优控制效果,根据不断调试的结果选取最优加权控制率参数为:k1=0.2,k2=0.8。
在不同车速工况下,加权控制率参数需根据预先仿真所得参数表进行查表选取。
5 仿真与分析
笔者通过MATLAB/Simulink对输入前轮转角为典型阶跃工况和典型单移线工况分别进行仿真分析,并与前轮转向控制系统进行对比,分析总结控制器对于稳定性的控制效果。
5.1 阶跃工况仿真
典型阶跃工况仿真,整个控制系统在Simulink环境下的仿真模型如图7。

图7 阶跃工况Simulink仿真模型Fig. 7 Simulink simulation model of step condition
取车速为25 m/s,前轮阶跃输入为3°,仿真曲线如图8。

图8 质心侧偏角响应曲线对比和横摆角速度响应曲线对比Fig. 8 Comparison of response curves of the sideslip angle of centroid and yaw rate
5.2 单移线工况仿真
典型单移线工况仿真,转向控制策略采用多点预瞄驾驶员模型[10],整个控制系统在Simulink环境下的仿真模型如图9。
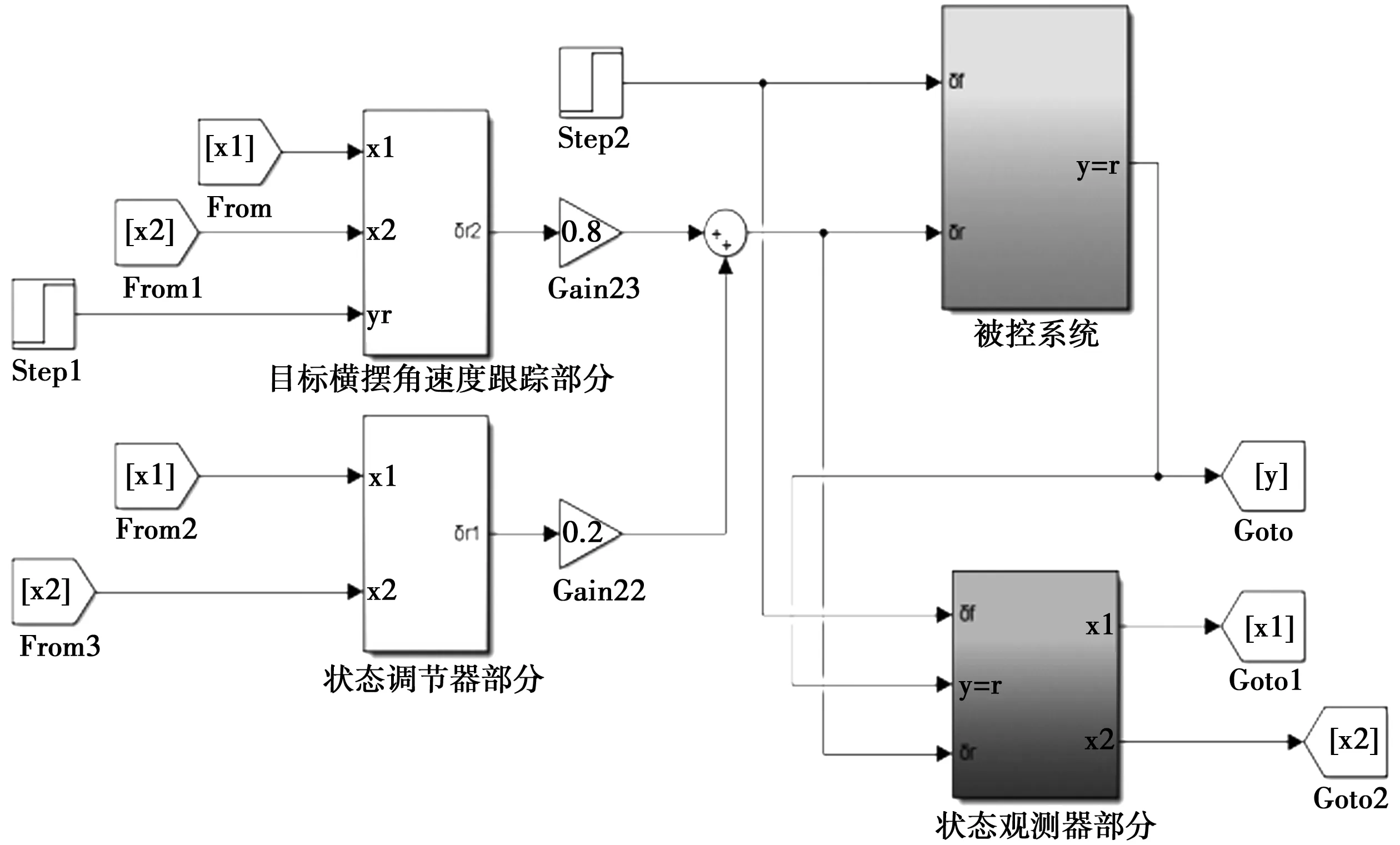
图9 单移线工况Simulink仿真模型Fig. 9 Simulink simulation model of single-lane condition
取车速25 m/s,行车轨迹、前轮转角曲线、试验仿真曲线如图10。
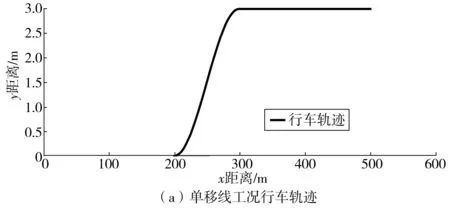

图10 实验仿真Fig. 10 Experimental simulation diagram
5.3 仿真响应分析
仿真结果分析可知:2自由度系统只有一个输入作用的情况下不可能同时将状态变量调到最优,因此设计状态观测器不断观测质心侧偏角,然后通过由状态调节器和由横标角速度跟踪的控制器进行加权,求得最优的控制律。由阶跃工况和单移线工况的仿真结果可见,设计的四轮转向控制器相对于前轮转向车辆而言,在不明显丧失驾驶员转弯时“路感”的同时(稳态时横摆角速度稍有减少)能够显著提高车辆的路径跟踪能力,同时可看出笔者设计的控制器还能够提高系统的响应速度,减小滞后环节,而这对于驾驶员高速时紧急转向安全性很有帮助。
6 结 语
在轮胎侧偏等概念的基础上,运用机理建模的方法,建立了四轮转向系统的2自由度数学模型,设计的一阶降维状态观测器对模型中质心侧偏角进行了观测,结果显示,所建立的观测器具有很好的观测效果;并且在状态观测器设计的基础之上分别运用极点配置法和线性2次型最优控制两种方法对控制器进行设计,提出了一种对状态调节器和目标横摆角速度跟踪进行加权的控制律设计方法,通过阶跃工况和单移线工况仿真试验结果显示,所设计的控制器能够在不显著降低驾驶员转向“路感”的前提下,明显的提升了车辆转弯时的路径跟踪能力,在维持汽车稳定性控制上具有一定的实际应用价值。
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
小学生学习指导·爆笑校园(2019年6期)2019-09-10
天津教育·下(2018年9期)2018-07-13
物理教学探讨(2018年1期)2018-02-13
自动化仪表(2017年8期)2017-08-30
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2014年10期)2014-12-13
中国自行车·骑行风尚(2014年4期)2014-10-10
探测与控制学报(2012年1期)2012-08-27
