
车路协同环境下信号交叉口速度引导策略
2019-12-17 00:31邵社刚王赵明
重庆交通大学学报(自然科学版) 2019年12期
刘 欢,杨 雷,邵社刚,王赵明
(1. 交通运输部 公路科学研究院,北京 100088; 2. 长春建业集团股份有限公司,吉林 长春 130028)
0 引 言
当车辆通过交叉口时,由于信号灯影响会产生停车等待和车辆加减速等情况,从而造成延误,并产生过多的污染物排放。因此有必要对车辆进行速度引导,使车辆能够不停车通过交叉口,以达到减少延误与排放目的。
国内外众多学者对交叉口速度引导策略进行了研究。YANG Yudi等[1]研究了如何令车辆不停车通过交叉口,通过对交叉口信号状态和对车辆时空轨迹分析,建立了绿波速度引导策略,并基于仿真结果得出:对车辆速度进行引导能使车辆延误时间和在交叉口停车次数减少29%。何乐乐等[2]规定车辆以最高限速行驶,若无法通过交叉口,再以绿灯剩余时间和车辆距交叉口距离及车辆加速度来计算车辆能否顺利通过交叉口的速度引导策略,并利用VISSIM仿真软件进行仿真,证明该引导策略对提高车辆出行效益和减少排放和能耗方面有着较好作用。张存保等[3]基于车-路协同系(vehicle infrastructure cooperative systems, VICS),对交叉口信号控制进行了分析,通过研究控制方法的不足,基于时间窗概念引入了滚动预测方法,信号控制效果用相位饱和度来表示,考虑速度引导策略对车速的影响,提出了车-路协同环境下的交叉口速度引导策略;并对该速度引导策略进行基于VISSIM的模拟试验;结果表明:该策略能减少车辆在交叉口的延误时间和停车次数。安实等[4]提出了一种以多级可变速度限制为基础的信号交叉口绿色速度引导策略,以可变速度限制值为控制变量,在不额外增加行程时间基础上,对车辆行驶轨迹进行平滑处理;其结果表明:该策略能有效降低定时信号控制交叉口的车辆延误,并能同时减少车辆油耗和排放。王东磊等[5]提出了一种模糊控制速度引导策略,通过对车辆加速过程期望速度进行模糊控制,进而实现车辆的低排放;结果证明:基于模糊控制的速度引导策略能有效达到节能减排目的。R.K.KAMALANATHSHARMA等[6]将车辆以消耗最少能源通过交叉口为研究目标,提出了环境友好型的速度引导策略,并通过验证表明油耗减少约30%。CHEN Zhi等[7]提出了定时信号控制交叉口的生态驾驶优化模型,通过遗传算法对车辆时空轨迹进行优化,结果显示生态驾驶策略能减少大概50%的车辆排放。QIAN Gongbin等[8]提出了一种以减少车辆油耗为目标的理论模型,并通过Aimsun软件进行模拟,分析了交叉口车辆行程时间和车辆油耗。LAI Wentai[9]通过对美国部分公交车使用生态驾驶策略前后的燃油数据进行分析,得出了生态驾驶优化策略能减少公交车10%油耗的结论。LIU Huiyuan等[10]通过遗传算法对高速公路车辆进行了有效的速度引导。CHEN Shukai等[11]提出了一种改进的自适应控制方法,包括车辆到达估计模型和信号优化算法,分别考虑了3个目标函数,即最小化延迟,队列长度和流入-流出量最大化;结果表明:该研究在实时交通自适应信号控制系统中具有潜在的适用性。D.J.CHANG等[12]、李宗义[13]、H.LARSSON等[14]分别提出了速度引导策略,得出该策略能减少车辆油耗,且优化效果明显的结论。
上述研究大多针对提高车辆出行效率和减少车辆排放进行了分析。笔者旨在综合考虑减少排放和延误,提出了一种新的综合优化速度引导策略。
1 研究方法
1.1 速度引导方法设计
在高阶车-路协同环境下,智能网联车辆均配置有车载端实时通讯单元,车辆速度、位置等信息会通过车载端上传至网络服务平台,亦称为网联信息端。同时,网联信息端将当前交叉口的信号相位、前方车辆速度与位置等信息发送给车载端,对驾驶员进行调整车速的诱导提示,以实现车辆速度引导。
通过对各种情况的分析,笔者决定对连续定时信号交叉口、主路流量明显大于次路、车速在进入道路前速度保持恒定不受干扰等情况进行仿真分析[2]。网联信息端会根据车辆车速、信号灯周期、信号相位、是否有前车、前车速度等信息对受控车辆速度进行计算。当车辆不能以当前速度匀速通过交叉口时,会对其进行速度引导;若车辆可通过引导在当前绿灯区间加速通过交叉口,则会对车辆进行加速引导,从而使得车辆能在当前绿灯区间通过交叉口;反之,当车辆以当前最高限速行驶都不能通过交叉口时,会对车辆进行减速引导,使得车辆减速到合适速度,并在下个绿灯区间通过交叉口[15]。速度引导策略工作原理如图1。
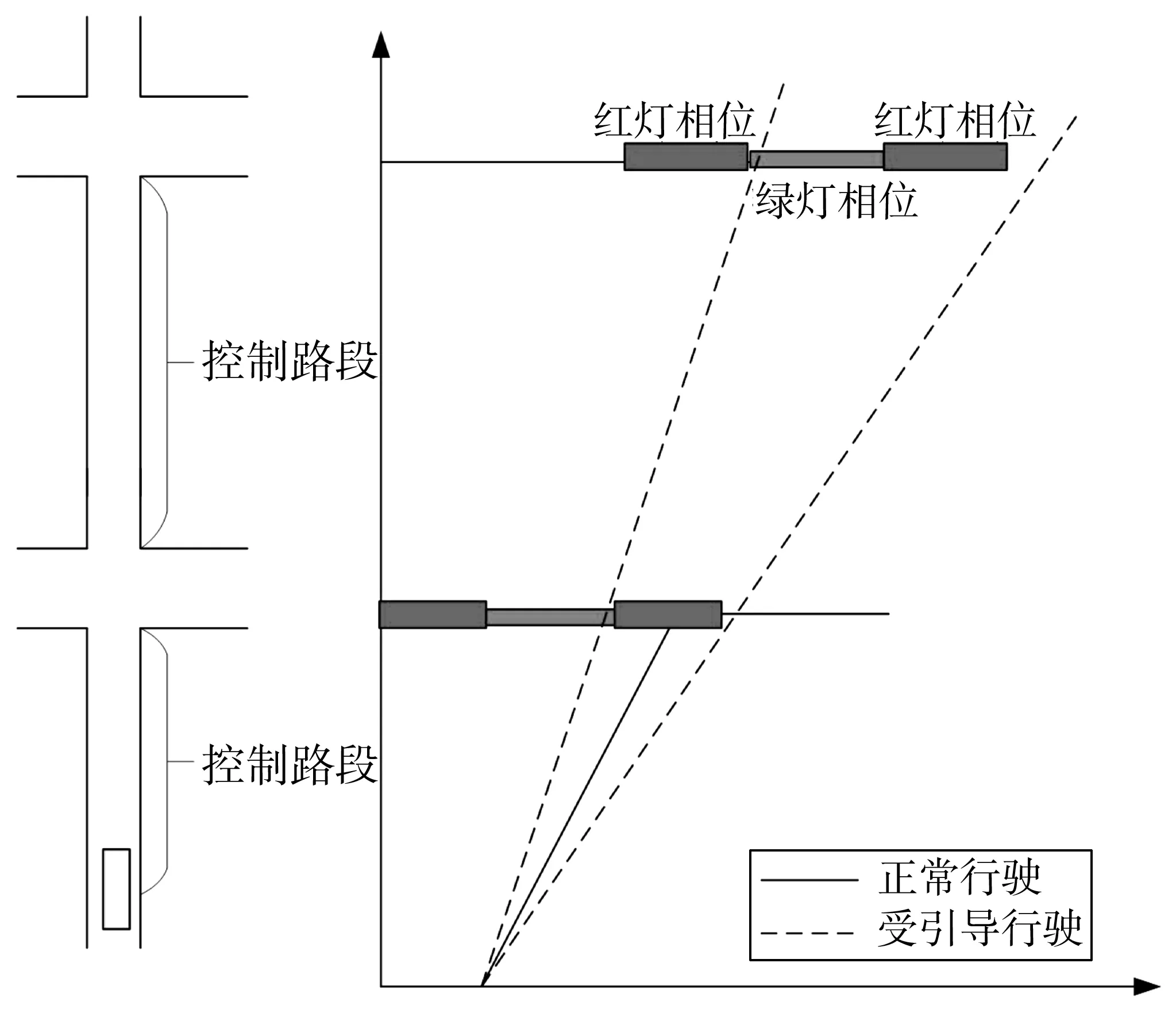
图1 车辆速度引导工作原理Fig. 1 Working principle of vehicle speed guidance
当网联车辆通过交叉口时,对应的速度引导存在以下4种情况:
1)匀速通过:网联车辆不受前方车辆影响,匀速行驶能在当前绿灯相位内通过交叉口,如图2(a)(①→③或②→③过程);
2)加速通过:网联车辆不受前方车辆影响,以当前速度匀速行驶到交叉口时会处于红灯相位,若当前车辆加速行驶至最大限速会在红灯相位之前的绿灯相位通过交叉口,如图2(b) (①→③或②→③过程);
3)减速通过:网联车辆不受前方车辆影响,以当前速度匀速行驶到交叉口时为红灯相位,车辆加速行驶则无法在当前绿灯相位通过交叉口,车辆减速至合适速度,并在下一个绿灯相位通过交叉口,如图2(c) (①→②过程);
4)跟驰通过:网联车辆受前方车辆影响,将网联车辆及后方一系列的非网联车辆视为一个车队,则位于网联车辆前方的非网联车辆各种参数已知,由此令当前网联车辆延后一个相对前车安全的最小车头时距通过交叉口,如图2(d) (①→②过程)[16]。
速度引导策略流程如图3。
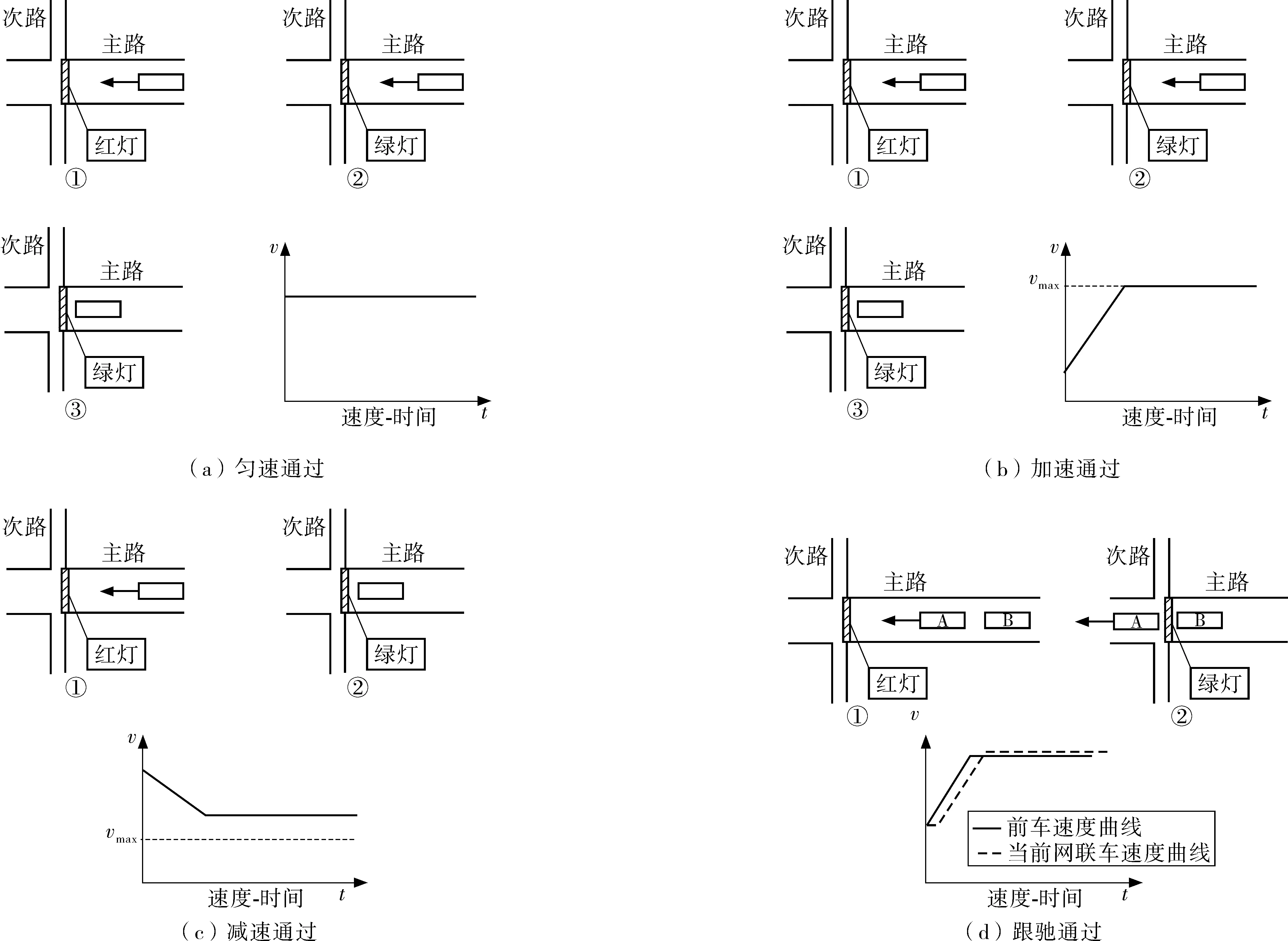
图2 车辆通过交叉口的4种情况Fig. 2 Four situations of vehicle passing through intersections
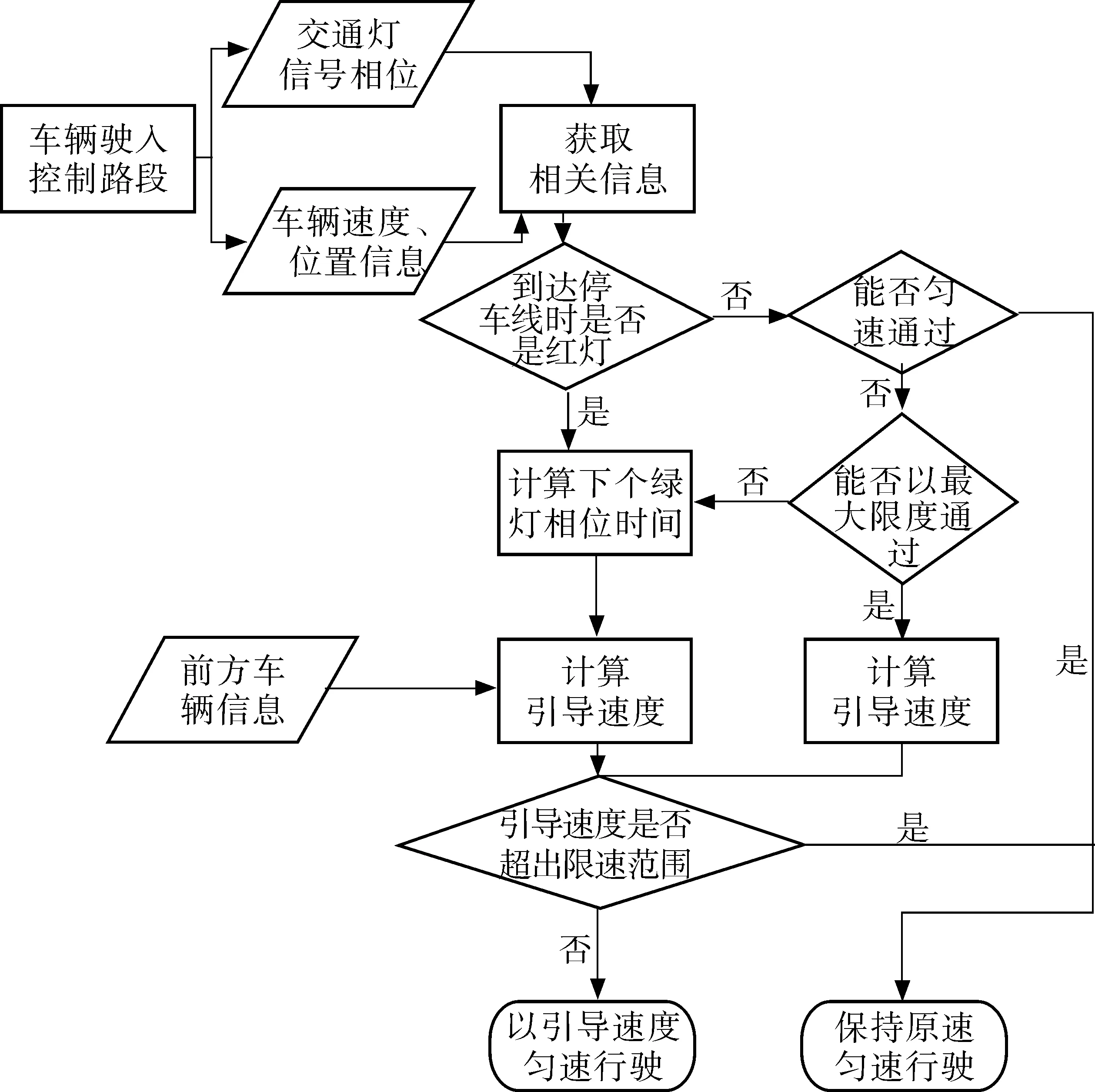
图3 速度引导策略流程Fig. 3 Speed guidance flow chart
1.2 速度引导策略数学模型(图4)
图4中:C为交通控制信号周期;v0为车辆初始速度;l为车辆距停车线的距离;t0为交通信号灯所处的周期内时刻。
车辆最高速度为vmax;车辆的加速度为a,由此可得式(1)~(3):
车辆匀速到达停车线时间:
(1)
车辆匀加速到最高速度,再匀速到停车线时间:
(2)
当车辆到达停车线时,信号灯所处信号周期内时刻为t1:
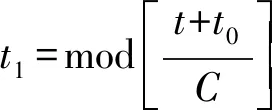
(3)
设交叉口信号灯在0-X时段内为绿灯区间,在X-C时段内为红灯区间。
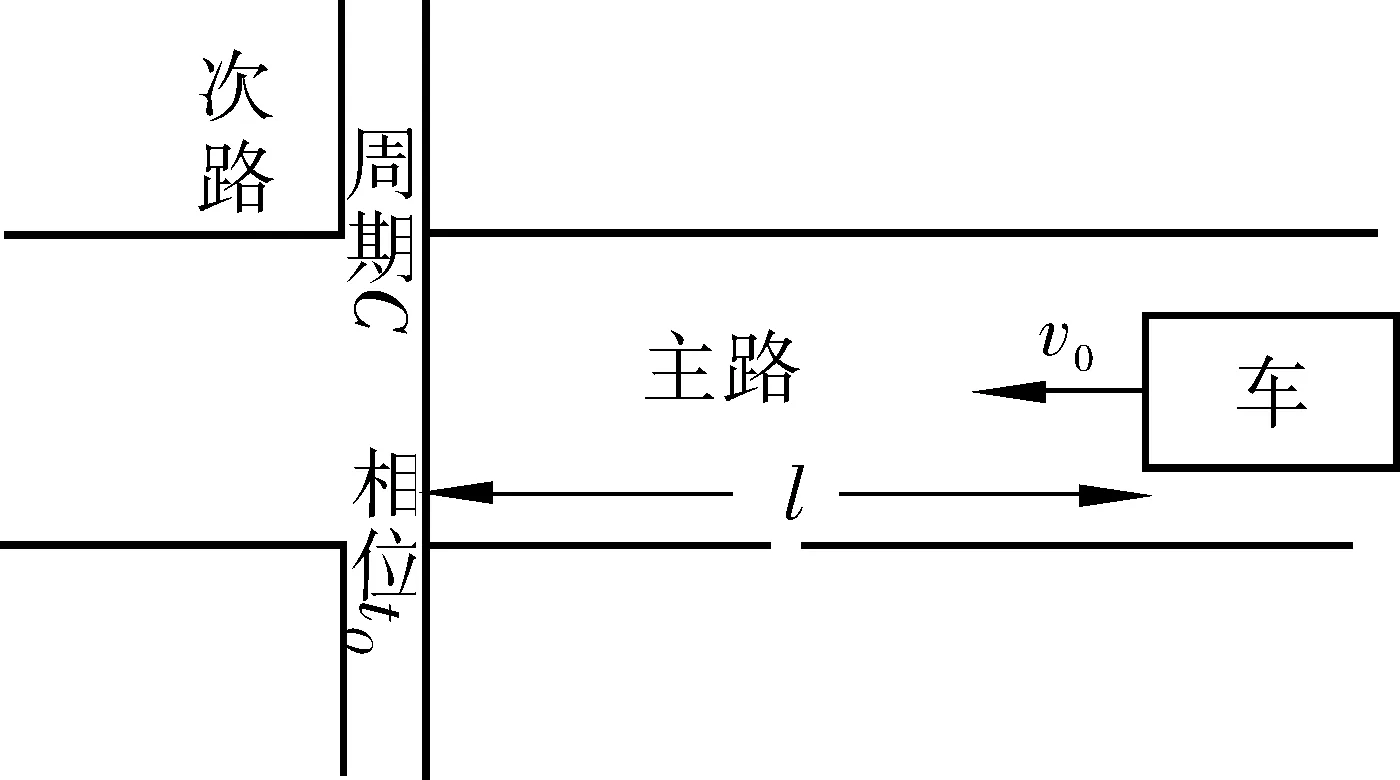
图4 模型示意Fig. 4 Model schematic
1.2.1 匀速行驶情况(0-X时段)
当车辆匀速行驶时,若0≤t1≤X,即车辆匀速行驶到停车线时在绿灯区间内,且该车辆前方没有其他车辆对其速度产生干扰,则该车辆可匀速通过交叉口,那么该车辆在系统引导下以匀速通过交叉口,计算t采用式(1)。
1.2.2 匀速行驶情况(X-C时段)
当车辆匀速行驶时,若X≤t1≤C,即车辆匀速行驶到停车线时在红灯区间内,那么对该车辆进行速度引导,使其匀加速到最高速在匀速到达停车线,即t的计算方式采用式(2)。
这种情况下,又分为两种情况:
1)当车辆匀加速到最高速再匀速行驶时,若有0≤t1≤X,也就是在绿灯区间时,受引导车辆到达交叉口,且该车辆前方没有其他车辆对其速度产生干扰,则该车辆可匀加速到该路段允许的最高速度再匀速通过交叉口;
2)若X≤t1≤C,即车辆以最高速度行驶到交叉口的时刻位于信号灯的红灯区间内。则该车辆匀速和匀加速都无法通过该交叉口。若车辆前方没有车辆对其速度产生干扰,则该车辆应在交叉口信号灯的下一个周期绿灯区间内通过。则该车从驶入控制区间到其到达交叉口的真实时间如式(4):
tr=C-t0
(4)
设车辆的加速时间为tm;车辆匀速行驶的时间为tn;则可得到式(5)~(7):
tm+tn=tr
(5)
vt=v0+tma
(6)
(7)
联立式(5)~(7),可得车辆通过交叉口时的速度(式中加速度为负数),如式(8):
(8)
1.2.3 加速行驶情况
当车辆受引导车辆加速行驶时,前方有车辆影响其行驶状态,且前方车辆速度为vk,则车辆匀加速到vk再匀速行驶到停车线的时间如式(9):
(9)
同样,当车辆到达停车线时,信号灯所处信号周期内时刻t2,如式(10):
(10)
当0≤t2≤X时,受引导车辆能在绿灯时间通过交叉口,则受引导车辆跟随前车在当前周期通过交叉口;当X≤t2≤C时,受引导车辆不能在当前绿灯相位通过交叉口,则车辆根据式(5)~(8),匀减速在下一个绿灯相位通过交叉口。
1.3 排放模型
美国环保局EPA开发的MOVES(motor vehicle emission simulator)排放模型主要采用行驶工况法来估算车辆的排放。其主要是通过分析车辆的比功率VSP(vehicle specific power)来计算车辆排放和油耗。之所以采用VSP,主要是因为车辆速度、加速度等信息都可通过VISSIM仿真得到[17]。比功率VSP计算如式(11):
VSP=v(1.1a+0.132)+0.000 302v3
(11)
式中:v为车辆瞬时速度;a为车辆加速度。
2 仿真运行
2.1 路网模型搭建
本研究以单交叉口为研究对象,以某一方向车辆直行车道进行研究,通过微观交通仿真软件VISSIM建模并用其评价指标来得到车辆行程时间、交叉口排队长度、车辆延误等。故采取以下模拟路网进行研究,如图5。

图5 VISSIM路网Fig. 5 VISSIM road network
图5中:该模型为郊区道路,主路为双向八车道,第一个交叉口为次路双向四车道,第二个交叉口为次路双向八车道。对其进行如下设定[18-19]。
1)研究路段:单个交叉口研究路段采用西进口直行车道,从车辆驶入控制线到车辆到达交叉口的距离为500 m;连续交叉口研究路段采用东进口直行车道,从车辆驶入控制线到车辆到达第二个交叉口的距离为1 500 m。
2)车流量:根据研究中道路车流饱和度不同,其车流量也会不同,主路单车道饱和流量为2 000辆/h,主路单方向流量分别选取3 200、4 800、6 400辆/h,饱和度分别为0.4、0.6、0.8。由于研究路段为西进口直行车道,次路流量不会产生变化,故次路流量为500辆/h。道路饱和流量为8 000辆/h,是车辆在自由流速度下所能通过的最大流量。
3)车速:在无速度引导策略引导下,自由车辆期望速度为50 km/h,速度引导策略控制下的车辆车速为30~70 km/h。
4)加速度:在速度引导策略控制下的车辆加速度和减速度都为3 m/s2。
5)信号配时:此模型中,主路信号灯信号周期为60 s,绿灯时间为1~39 s,黄灯时间为3 s,全红时间为3 s,两交叉口相位差为12 s。
6)仿真时间:仿真时间为0~3 600仿真秒,每300仿真秒记录一次数据。
7)评价指标:在模型评价指标中选取车辆从西进口进入路网直行800 m的行程时间、连续交叉口直行2 000 m的时间、车辆延误和交叉口排队长度作为该研究的评价指标,统计分析基于10次仿真实验结果平均值。
2.2 车路协同仿真平台搭建
基于VISSIM将基础路网模型构建之后,对模型进行外部处理,搭建车路协同仿真平台,如图6。

图6 车路协同仿真平台搭建示意Fig. 6 Construction of vehicle infrastructure collaborative simulation platform
图6中:利用外部程序控制VISSIM的COM接口,进而控制VISSIM仿真模型,仿真获取数据又通过COM接口反馈到外部程序。通过调用COM接口中的仿真、车辆、车道、评价等接口,实现对仿真路网中车辆实时速度进行引导控制。在运行过程中,通过外部程序面向对象的二次开发来减少COM接口的读写次数,从而提高仿真速度和仿真效率。
2.3 车辆渗透率设置
通过构建不同仿真场景进行对比分析。笔者采用不同饱和度和不同渗透率即网联车辆比例来进行对比。不同饱和度可从VISSIM仿真路网模型中进行修改,车辆渗透率从外部控制程序中进行修改,如图7。对应不同渗透率下的车辆运行状态,设定白色车辆为网联车辆即受控车辆,黑色车辆为不受控的自由行驶车辆。笔者设定渗透率分别为0、20%、50%、80%、100%;其中:0对应为无网联车辆,即对车流不进行速度引导的场景。
通过不同车辆渗透率仿真设置,可发现渗透率对引导车辆数影响较大,同时速度引导策略对应的优化效果也会受到一定影响。
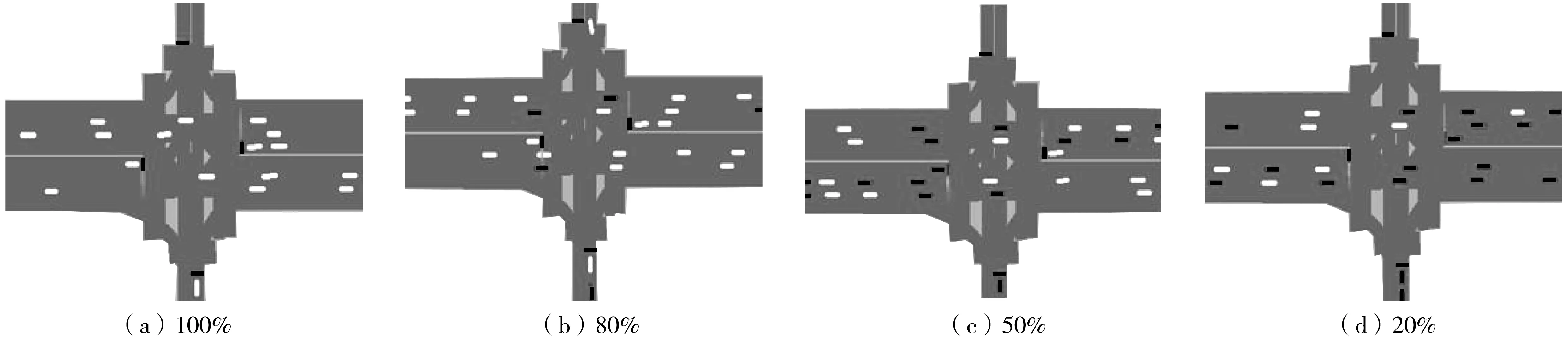
图7 不同渗透率仿真Fig. 7 Simulation with different permeability rates
3 结果分析
3.1 单交叉口出行效益分析
速度引导模型的优化指标总体分为出行效益指标和车辆排放指标。笔者对车辆出行效益指标进行分析,出行效益分析又具体分为行程时间分析、交叉口排队车辆数分析、车辆延误时间分析。
3.1.1 车辆行程时间分析
车辆行程时间为车辆从西进口进入直行800 m的行程时间。在速度引导策略控制下,车辆行程时间较无控制情况下有所减少,则说明速度引导策略可提高车辆出行效益。
当道路交通饱和度为0.4时,即西进口直行车道单车道流量为800辆/h,对不同渗透率车辆行程时间进行对比分析,结果如图8(a)。同理,当道路交通饱和度分别为0.6、0.8时,车辆行程时间对比分析分别如图8(b)、(c)。
当渗透率不为0时,速度引导策略能显著减少车辆的行程时间,随着车辆渗透率增加,车辆行程时间也随之减少。当渗透率达到100%时,车辆行程时间达到最小,饱和度分别为0.4、0.6时,行程时间分别减少了10.43%、14.72%;当饱和度为0.8时,行程时间减少了45.19%。在有速度引导情况下,车辆有序通过交叉口,道路堵塞现象比无引导情况下有所减缓,随着渗透率提高,交叉口拥堵情况也随之逐渐减少,从而使得车辆行程时间趋于车辆不停车通过交叉口时间,故在饱和度为0.8情况下,速度引导策略对车辆行程时间减少效果显著。
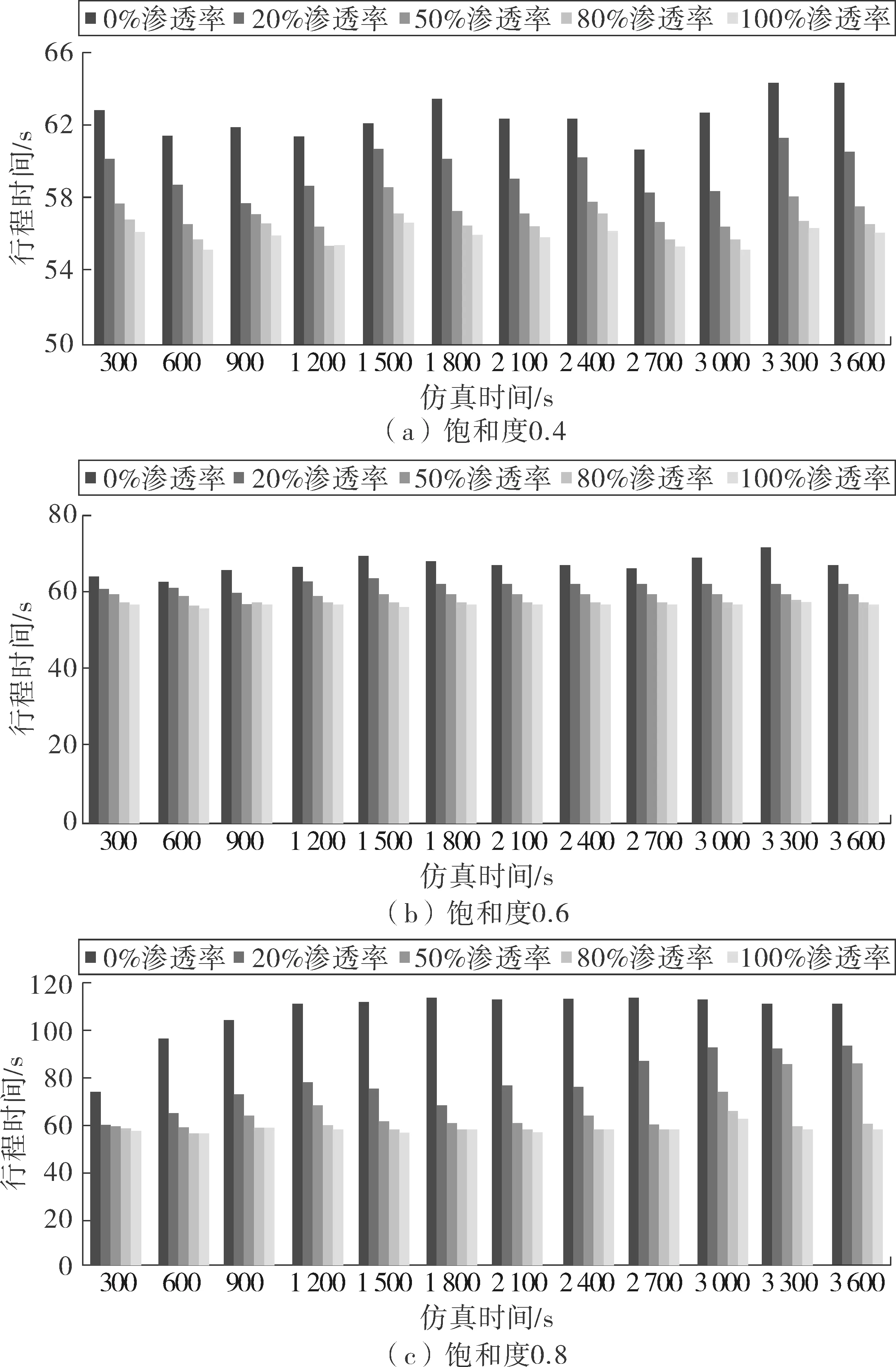
图8 车辆行程时间对比Fig. 8 Comparison of vehicle travel time
3.1.2 排队车辆数分析
速度引导策略的目标之一是令车辆尽可能不停车通过交叉口,因此交叉口排队车辆数是其重要的指标之一。当排队车辆数减少至0或接近0时,可证明速度引导策略在提高车辆出行效益方面效果显著。
当道路交通饱和度为0.4时,即西进口直行车道单车道车流量为800辆/h,其中渗透率0%为无速度引导的仿真场景。对排队数进行对比分析,其结果如图9(a)。同理,当道路交通饱和度分别为0.6、0.8时,交叉口排队车辆数对比分析结果分别如图9(b)、(c)。
在不同的饱和度情况下,排队长度都随着渗透率增加而减少,并且当渗透率为100%时,交叉口排队车辆数基本为0。由图9(c)可看出:在0.8高饱和度情况下,由于车辆数较多,在渗透率为20%时,因每个绿灯时长内通过的车辆数有限,在车辆进入数量较多情况下,速度引导车辆较少,由此无法令所有车辆都能够不停车通过交叉口,且由于车辆数不断增多,其排队车辆数会逐渐增多,在仿真即将结束前没有通过交叉口的车辆数将达到一个最大值,因此会有排队车辆数大量增加。
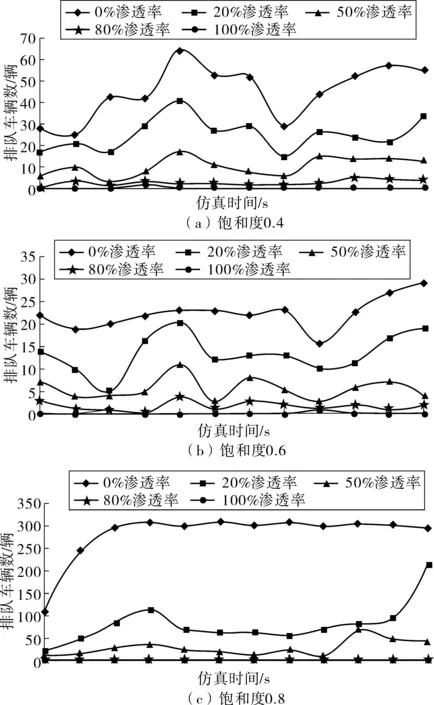
图9 交叉口排队车辆数对比Fig. 9 Comparison of the number of queuing vehicles at intersections
3.1.3 车辆延误时间分析
在此仿真模型中,会因为车辆在交叉口停车或排队,导致车辆加速和减速造成延误。在速度引导策略控制下,车辆会减少停车和排队行为,及一些不必要的加减速行为,从而减少延误。
当道路交通饱和度为0.4时,其渗透率0为无速度引导场景,对比分析结果如图10(a)。同理,当道路交通饱和度分别为0.6、0.8时,车辆延误时间对比分析结果分别如图10(b)、(c)。
在速度引导策略控制下的车辆延迟时间显著减少,当渗透率为100%时,延误时间为一个较小的稳定值,延误时间平均减少率约为90%。
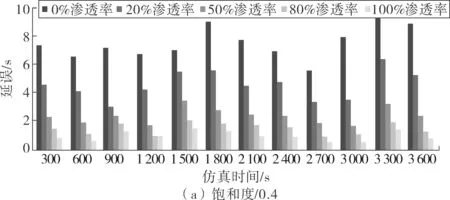
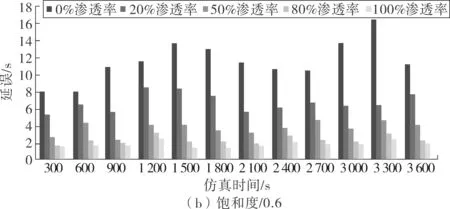
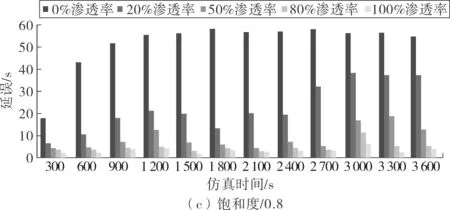
图10 车辆延误时间对比Fig. 10 Comparison of vehicle delay time
3.2 单交叉口排放能耗分析
排放及能耗分析采用MOVES微观排放模型,并基于VSP概念来计算车辆排放和能耗。笔者选取HC、CO、NOx和能耗作为分析指标,HC、CO、NOx单位为g,能耗单位为kJ。对饱和度0.4、0.6、0.8的仿真场景分别进行统计,结果如表1。
笔者对不同渗透率不同饱和度下的HC、CO、NOx和能耗进行对比分析,其中HC对比结果如图11。
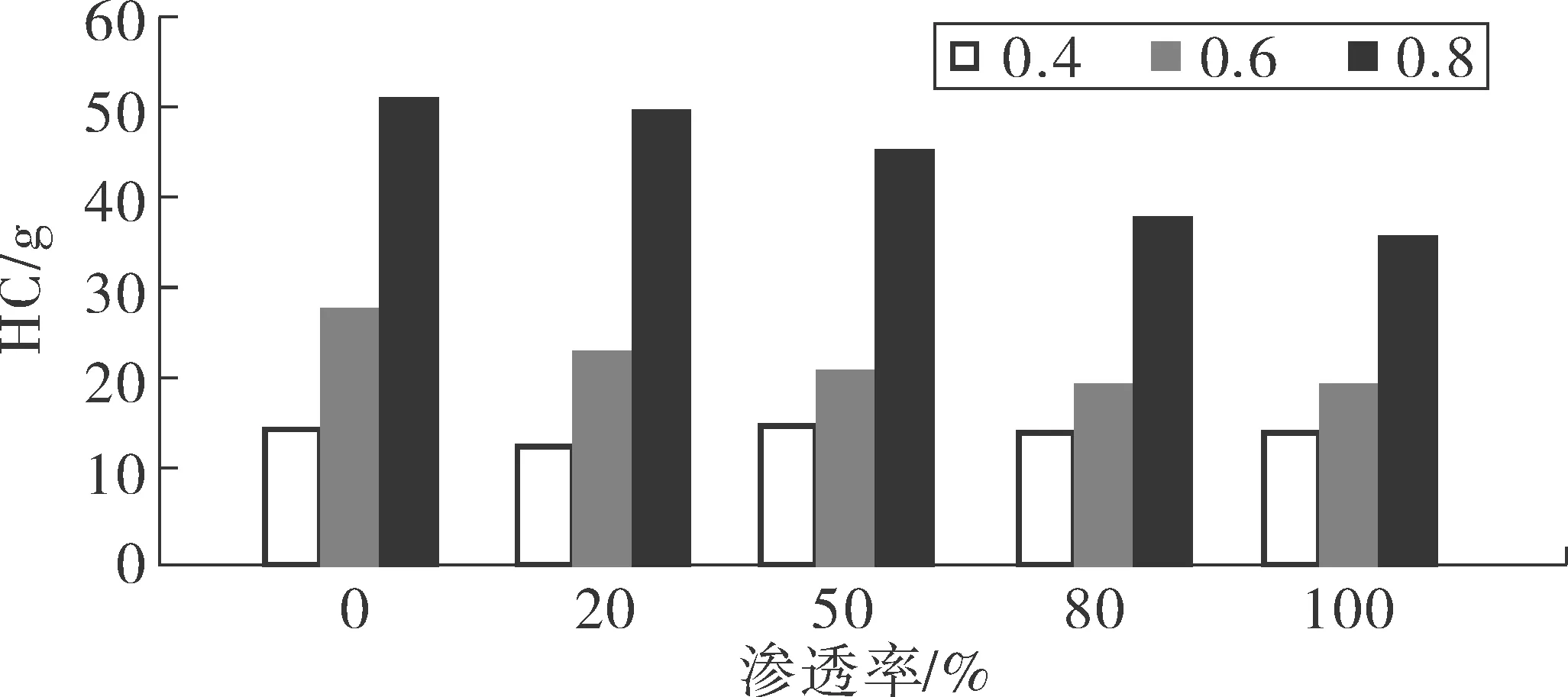
图11 不同饱和度不同渗透率下HC排放Fig. 11 HC emissions at different saturation and permeability rate
在100%渗透率情况下,与没有速度引导的情况相比,HC排放量减少了约20%,但能耗减少率仅有3%。当饱和度为0.4时,由于车流量较小,车辆停车、排队、加减速行为也相对较少,污染排放较少,因此渗透率为100%时的HC排放量减少量较少;饱和度为0.6、0.8时,其渗透率100%HC排放量减少量较多。总体来说,速度引导策略对减少能耗具有较小效果。这是因为车辆进行加速或减速时会匀速行驶,导致消耗更多燃料,然而速度引导策略控制下的车辆为提高出行效益,会比自由行驶车辆具有更多的加减速行为。虽然交叉口排队停车能耗略有减少,但是车辆加减速所导致的能耗则较大。
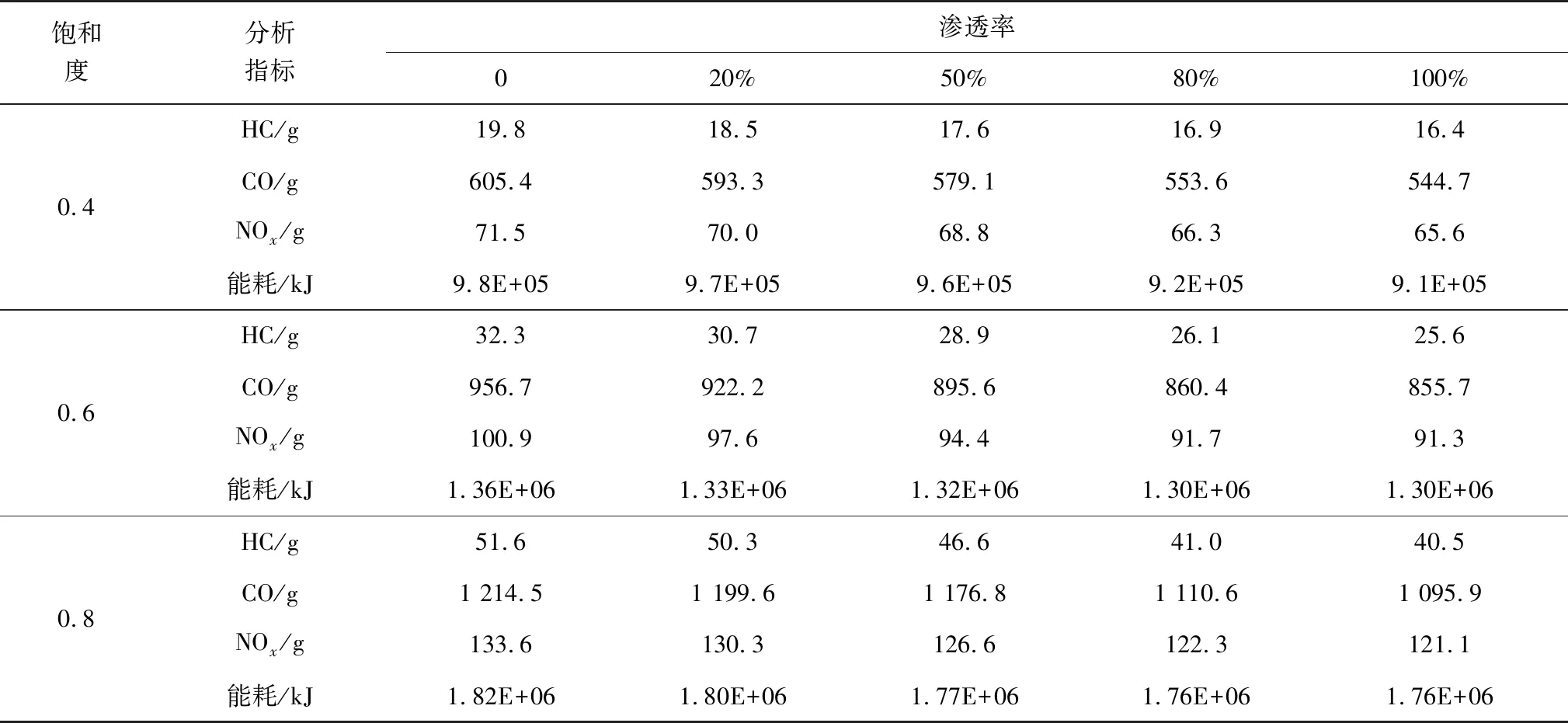
表1 不同饱和度不同渗透率下指标Table 1 Indicators at different saturation and permeability rate
3.3 连续交叉口出行效益分析
不同饱和度、不同渗透率情况下对连续多交叉口的出行进行分析比较复杂,需考虑多种因素。因此笔者只针对连续两个交叉口,渗透率分别0%和100%的情况进行分析。
3.3.1 车辆行程时间分析
在连续两个交叉口情况下,车辆受到速度引导时,会明显降低车辆行程时间,在高饱和度情况下其效果十分显著;在100%渗透率情况下,车辆行程时间在减少之后趋于稳定,说明在速度引导策略控制下,车辆在进入路网后逐渐形成有序的车队通过交叉口,从而减少了延误,提高了出行效率,减少了行程时间,如图12。
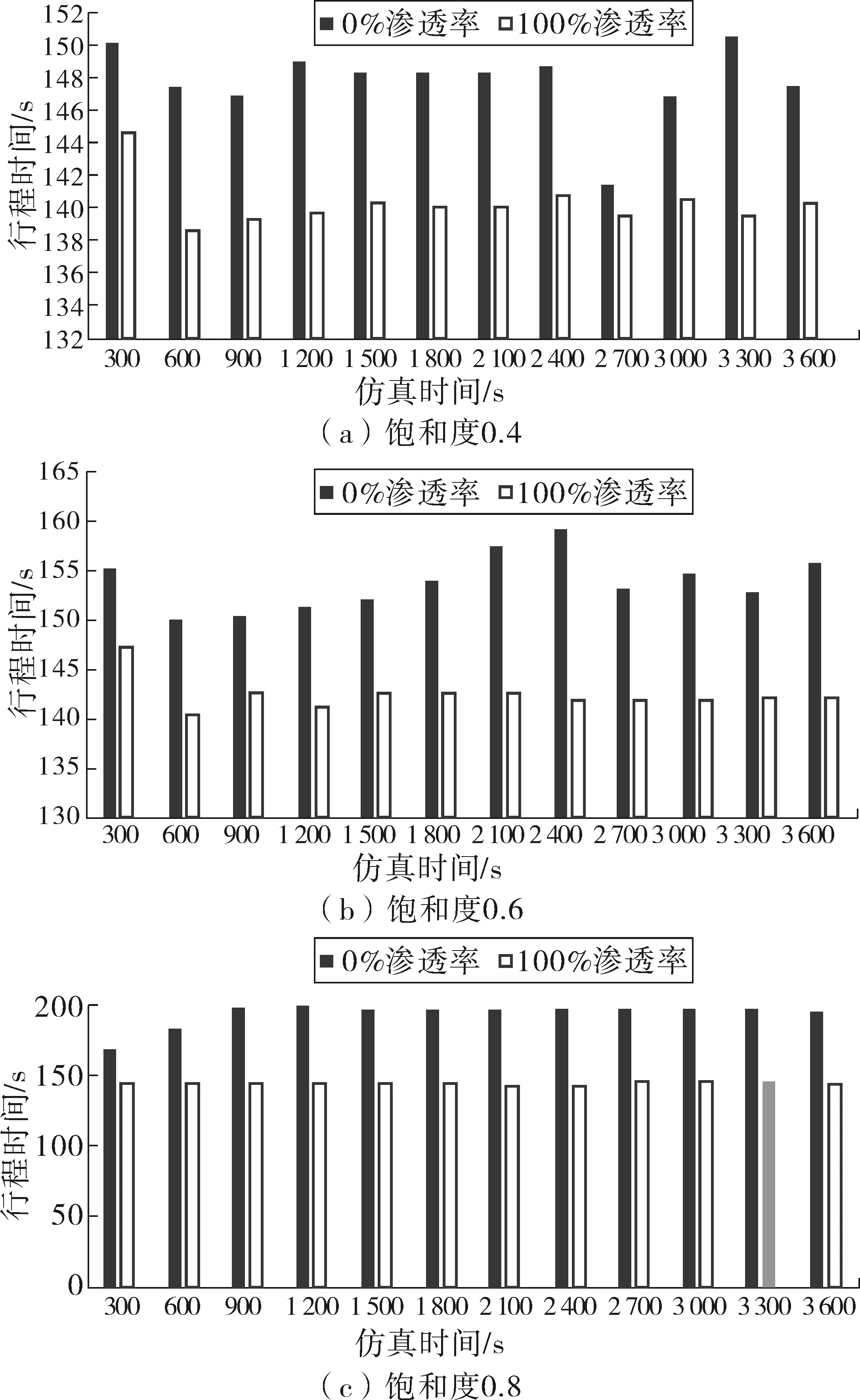
图12 车辆行程时间对比Fig. 12 Comparison of vehicle travel time
3.3.2 排队车辆数分析
排队车辆数为连续两个交叉口排队车辆数之和,对比情况如图13。在不同的饱和度下,当渗透率为100%时,交叉口排队车辆数基本为0。由图13可看出:在0.8的高饱和度情况下,因车辆数较多,在刚开始的300仿真秒进入路网的车辆较少,因此当车辆数增多之后会有排队车辆激增,而后趋于稳定。所有情况下速度引导排队车辆数都基本为0,说明速度引导策略对减少车辆排队具有较为明显作用。

图13 交叉口排队车辆数对比Fig. 13 Comparison of the number of queuing vehicles at intersections
3.3.3 车辆延误时间分析
在100%渗透率情况下,对于通过连续两个交叉口的车辆,车辆延误有显著减少,并趋于稳定,说明速度引导策略能有效减少车辆延误时间,提高车辆出行效益,如图14。

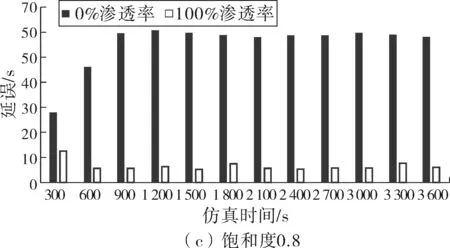
图14 车辆延误时间对比Fig. 14 Comparison of vehicle delay time
3.4 连续交叉口排放能耗分析
采用与单交叉口排放能耗分析同样的方法,基于VSP概念,通过MOVES微观排放模型对连续两个交叉口的排放能耗进行分析,结果如图15。
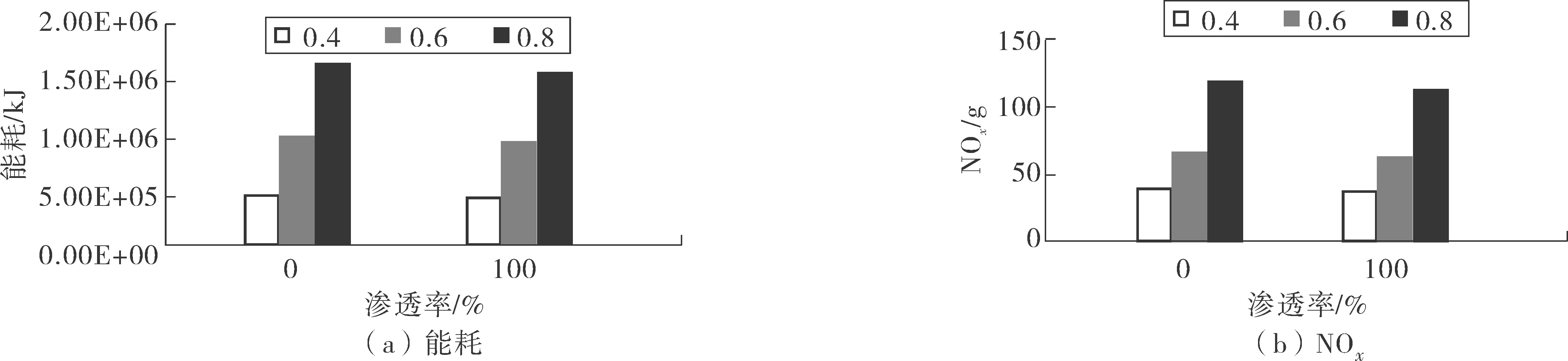
图15 不同饱和度不同渗透率下能耗和NOx对比Fig. 15 Comparison of energy consumption and NOx at different saturation and permeability rate
对车辆通过连续两个交叉口情况,在100%的渗透率下,与车辆无引导的情况对比,饱和度为0.4、0.6、0.8的时候车辆的NOx排放量分别减少了8.86%、10.25%、10.55%,能耗分别减少了7.2%、4.3%、3.4%。在低饱和度情况下,能耗减少效果十分明显;在高饱和度的情况下,因车辆数较多,速度引导策略会进行较为频繁的加减速,因此能耗的减少量会相对减少。综合以上结果,该速度引导策略对减少排放及能耗有着较为明显效果[20-21]。
4 结 语
考虑到速度引导策略的实现方式,笔者所提出方法仅适用于具有较大间距的连续定时信号控制交叉口,及车流间相互干扰较小的城市主干道。此外,笔者对单交叉口直行方向及连续两个交叉口间的直行车辆进行了分析,下一步将重点研究多交叉口多方向行驶车辆的速度引导策略。
笔者所提出的速度引导策略可用于提高车辆出行效益,减缓交叉口拥堵,减少道路交通拥堵状况,能对车辆在交叉口的通行起到较好促进和引导作用。
猜你喜欢
建材发展导向(2022年14期)2022-08-19
内燃机与配件(2022年2期)2022-01-17
建材发展导向(2021年19期)2021-12-06
西南石油大学学报(自然科学版)(2018年6期)2018-12-26
西南石油大学学报(自然科学版)(2018年2期)2018-06-26
西南石油大学学报(自然科学版)(2018年1期)2018-02-10
金融经济(2017年9期)2017-09-13
中国公共安全(2017年9期)2017-02-06
中国机械(2016年6期)2016-06-21
中国房地产业(2016年2期)2016-03-01
