
基于EKF的GNSS/SINS组合导航系统应用
2019-11-29 09:18:18王海霞陈云
山东科技大学学报(自然科学版) 2019年6期
,王海霞,陈云
(1.山东科技大学 山东省机器人与智能技术重点实验室,山东 青岛 266590;2.山东科技大学 海洋工程研究院,山东 青岛 266590;3.山东科技大学 电气信息系,山东 济南 250031)
为获得更高精度的定位结果,将多种导航定位技术组合,已成为导航定位的热门发展方向。全球卫星导航系统(global navigation satellite system, GNSS)是全球所有的卫星导航系统的总称,包括GPS(美国)、GLONASS(俄罗斯)、GALILEO(欧洲)和 BDS(中国)等卫星导航系统。随着各导航系统的不断发展建设,多频多系统GNSS应用已成为卫星导航定位系统的主要发展趋势之一。与单一系统相比,GNSS系统可以为卫星导航系统提供更丰富的可用信号,更好的星座条件,获得更高精度的载体三维位置信息[1]。然而,当卫星信号被遮挡或受到干扰时,如在室内、高楼密集的城市、茂密的树林、海上等环境,GNSS系统无法得到稳定、持续的定位信息。惯性导航系统(inertial navigation system, INS)是一种自主式导航系统,依据惯性工作原理,应用陀螺仪、加速度计等惯性元件测得载体的角速度、加速度,然后通过积分得到其位置、速度和姿态等定位信息。INS具有自主性、隐蔽性及连续提供位置、速度、姿态信息等优点,但其导航误差会随时间增加而积累,严重影响定位的精度,不适合长时间连续工作[2]。INS主要包括平台惯性导航系统(platform inertial navigation system, PINS)和捷联惯性导航系统(strapdown inertial navigation system, SINS),二者本质相同,但PINS采用物理平台模拟导航坐标系,而SINS采用的是数学平台。SINS由于具有结构简单、体积小、重量轻、成本低和可靠性高等优点,逐渐成为目前最常用的惯性导航系统[3]。
通过以上分析可发现,若将两者结合起来,GNSS与SINS就能达到优势互补的效果[4-6]。当卫星信号接收良好时,利用GNSS的定位结果对SINS定位结果进行校正,消除SINS的累积误差;当卫星信号受到遮挡时,SINS发挥短时间内定位精度高的优点单独进行定位,可以持续得到高精度、高可靠性的导航信息。文献[11]对基于扩展卡尔曼滤波(extended Kalman filter, EKF)的GNSS/SINS深组合导航系统进行仿真,其位置误差较大,地向误差达到10 m左右。文献[12]对GPS/SINS紧密组合导航系统进行了仿真研究,表明紧密组合导航比松散组合导航收敛性更好、精度更高,仿真实验的位置误差在0.5 m左右。文献[13]通过仿真实验证明基于EKF的GPS/SINS松组合导航算法能对载体的速度和姿态实现有效跟踪,但没有给出是否能对载体的位置进行有效跟踪,且载体的导航误差8 min后才收敛,位置误差最低值在5 m·s-1左右。本研究针对GNSS、SINS单独应用时存在不足的问题,将两者组合,并通过车载实验采集导航数据,利用EKF算法对GNSS/SINS组合导航系统进行解算,得到的位置误差、速度误差及姿态误差都快速收敛,且位置误差精度保持在厘米级,速度误差在0.1 m·s-1以内。
1 捷联惯性导航
1.1 捷联惯性导航系统基本原理
SINS属于递推导航系统,以初始对准得到的初始姿态、载体的初始位置、速度为基础,利用陀螺仪、加速度计得到角速率及比力值,再通过捷联惯性导航算法推算出下一时刻载体的姿态、位置、速度信息。以此类推,可以计算出载体每一时刻的导航信息。SINS的数据更新频率高,且在短时间内拥有较高的导航精度。
1.2 捷联惯性导航系统基本方程
采用当地地理坐标系作为导航坐标系(n系), 当地地理坐标系也称为东北天(east-north-up, ENU)坐标系[7]。SINS导航方程[8-9]主要包括姿态微分方程、速度微分方程和位置微分方程:
1) SINS的姿态微分方程为:
(1)


(2)

2) SINS的速度微分方程为:
(3)

3) SINS的位置微分方程为:
(4)
2 GNSS/SINS组合导航
2.1 GNSS/SINS组合导航原理
研究的组合导航[9]形式为松组合,松组合中SINS的加速度计、陀螺仪分别输出载体当前的比力、角速度信息,通过捷联惯性导航解算系统可求得位置PSINS、速度VSINS、姿态矩阵;而通过GNSS得到位置PGNSS、速度VGNSS。SINS与GNSS的位置、速度的差值为扩展卡尔曼滤波器的输入,通过组合导航算法得到惯导系统状态误差估计值[10-11],利用该误差估计值对捷联惯导系统输出值进行校正,最后得到高精度、稳定连续的载体位置、速度及姿态信息。其原理图如图1所示。
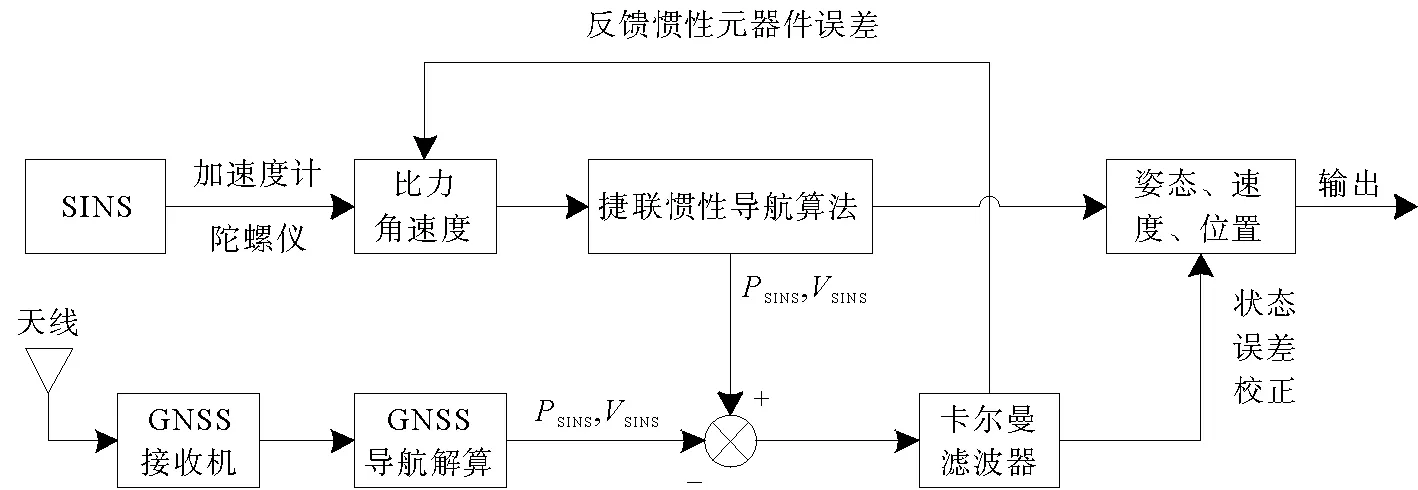
图1 GNSS/SINS组合导航原理图Fig.1 Schematic of the integrated navigation of GNSS/SINS
2.2 GNSS/SINS组合导航模型
GNSS/SINS组合导航模型将惯导误差方程、GNSS定位测速的误差方程分别作为系统状态方程和量测方程的基础,该系统的状态变量是由姿态误差、速度误差、位置误差、陀螺仪测量误差及加速度计测量误差组成的15维向量组成[12],即
X=[φE,φN,φU,δνE,δνN,δνU,δL,δλ,δh,εx,εy,εz,▽x,▽y,▽z]T。
(5)
系统的状态方程和量测方程[13]分别为:
(6)
式中:F(t)为系统状态矩阵;G(t)为系统噪声矩阵;Wd(t)为系统噪声向量;Z(t)为量测向量;H(t)为量测矩阵;V(t)为量测噪声向量。Wd(t)与V(t)均服从零均值白噪声,相互独立且互不相关。
式(6)中的系统状态方程和量测方程是线性连续的,为了能够在计算机中实现对数据的编程处理,需将其进行离散化处理[14],即
(7)
式中:Xk-1、Xk分别为k-1、k时刻系统的状态向量;Φk,k-1为k-1时刻至k时刻的系统状态转移矩阵;Γk-1为k-1时刻的系统噪声驱动矩阵;Wk-1为k-1时刻的系统噪声向量;Zk为k时刻的量测向量;Hk为k时刻的量测矩阵;Vk为k时刻的量测噪声向量。
3 EKF算法
卡尔曼滤波(Kalman filter, KF)是状态估计算法的基础,同时也是导航系统解算中最常用的滤波方法。KF在处理线性系统时,一般能够得到较好的结果。而GNSS/SINS组合导航系统的本质是非线性系统,使用KF则不能得到理想的滤波结果。1969年,Bucy等[15]提出了扩展卡尔曼滤波算法,并将其成功的在非线性领域中进行应用,其原理是将非线性系统进行泰勒级数展开,只取至一次项,从而得到其线性化的系统模型,解决了非线性系统不能得到理想的滤波结果的问题。
GNSS/SINS组合导航系统采用闭环反馈校正系统,使状态误差能够保持在较小值,提高组合导航定位的精度。扩展卡尔曼滤波过程包括时间更新和量测更新两部分,其基本步骤[9]:
1) 时间更新:
(8)
(9)
2) 量测更新:
(10)
式中,Rk为k时刻的量测噪声协方差矩阵,Kk为k时刻KF增益矩阵。
Pk=(I-KkHk)Pk,k-1,
(11)
式中,Pk为求得的k时刻系统状态协方差矩阵。
(12)

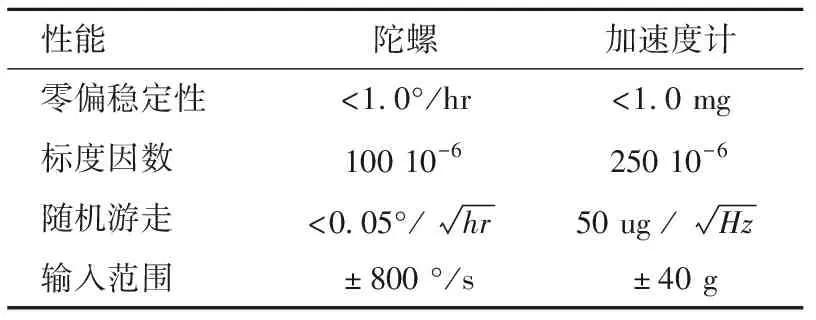
表1 SPAN-LCI惯导性能指标Tab.1 Performance index of the SPAN-LCI
由于SINS数据更新率比GNSS高,当只有SINS数据时,该系统仅进行时间更新过程,当GNSS的数据时间与SINS的一致时,组合导航系统既进行时间更新过程也进行量测更新过程。GNSS与SINS每次组合后的定位结果都会对该时刻SINS的结果进行校正,以消除其累积误差,使GNSS/SINS组合导航系统持续取得高精度的载体导航信息。
4 车载实验及分析
本实验在山东科技大学附近采集车载数据,实验设备为NovAtel的SPAN-LCI战术级IMU惯导、双系统GNSS(GPS、GLONASS)接收机。其中惯导数据的采样频率为200 Hz,GNSS数据的采样频率为5 Hz,惯导比GNSS的数据更新率更高。IMU惯导性能指标如表1所示。在Google Earth上显示的车辆轨迹如图2所示。实验分别对SINS单独导航和GNSS/SINS组合导航进行了定位解算,并将高精度组合导航后处理软件IE 8.6的解算结果作为参照值。其中,在GNSS信号不丢失的情况下,由IE软件处理的位置误差精度水平方向能达到0.01 m,垂直方向能达到0.015 m;其速度误差精度在水平和垂直方向都能达到0.01 m·s-1;其姿态误差中的横滚角、俯仰角误差精度都达到了0.005°,航向角误差精度达到了0.008°[16]。

图 2 Google Earth 中显示的跑车轨迹图Fig. 2 Vehicle trajectory in Google Earth
4.1 SINS单独导航实验
对由SPAN-LCI战术级IMU惯导采集的车载数据单独进行SINS导航解算,得到纯惯导定位在ENU三个方向的位置、速度以及姿态结果,并通过与IE解算的高精度结果比较得到SINS的定位误差,其位置误差、速度误差及姿态误差分别如图3~5所示。
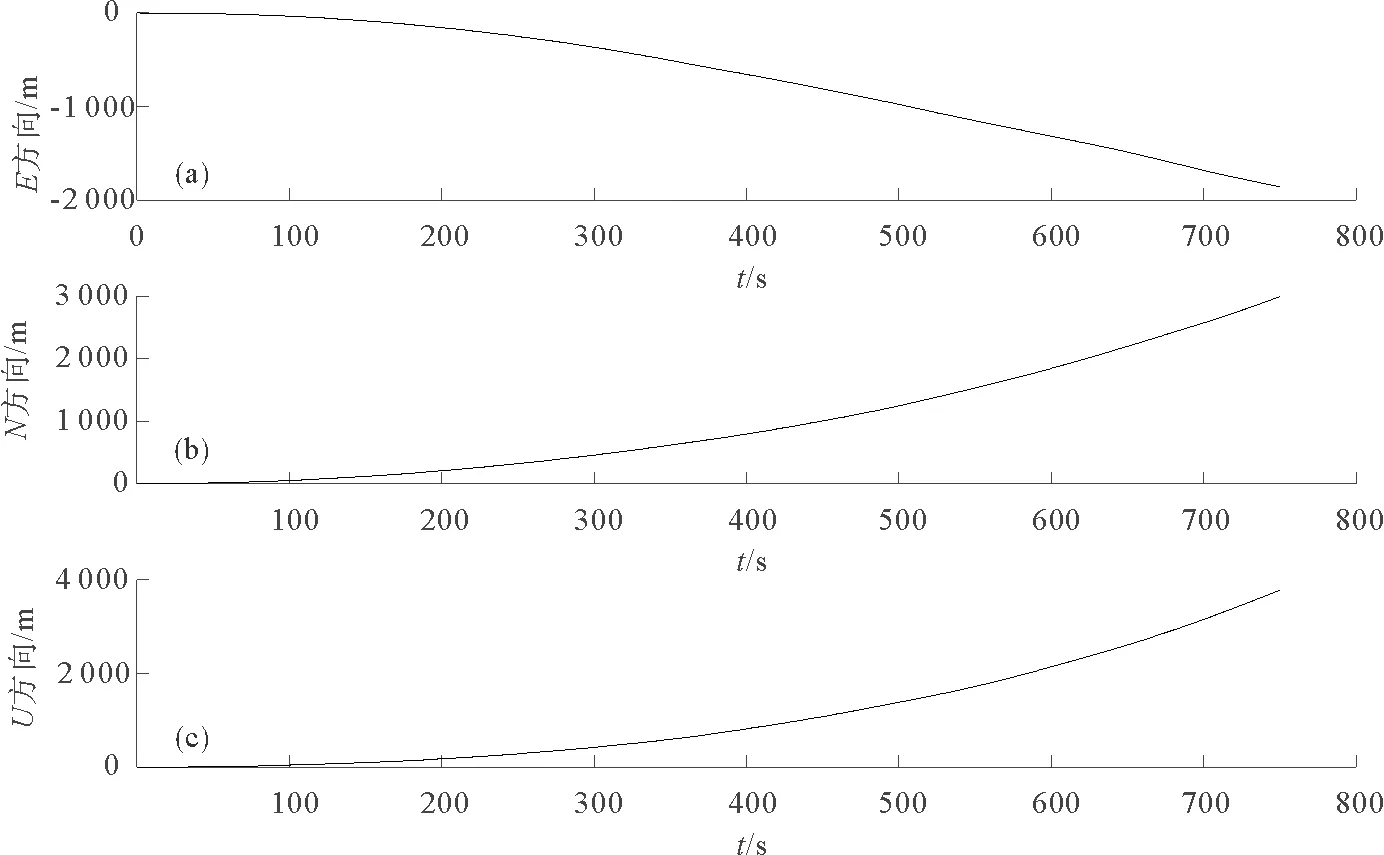
图 3 SINS位置误差Fig. 3 The position error of SINS
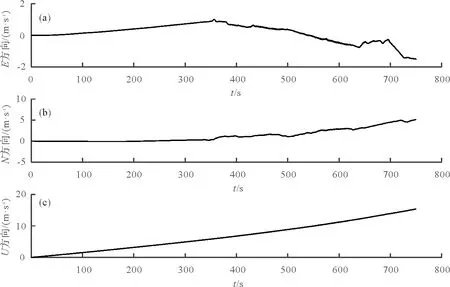
图 4 SINS速度误差Fig. 4 The velocity error of SINS
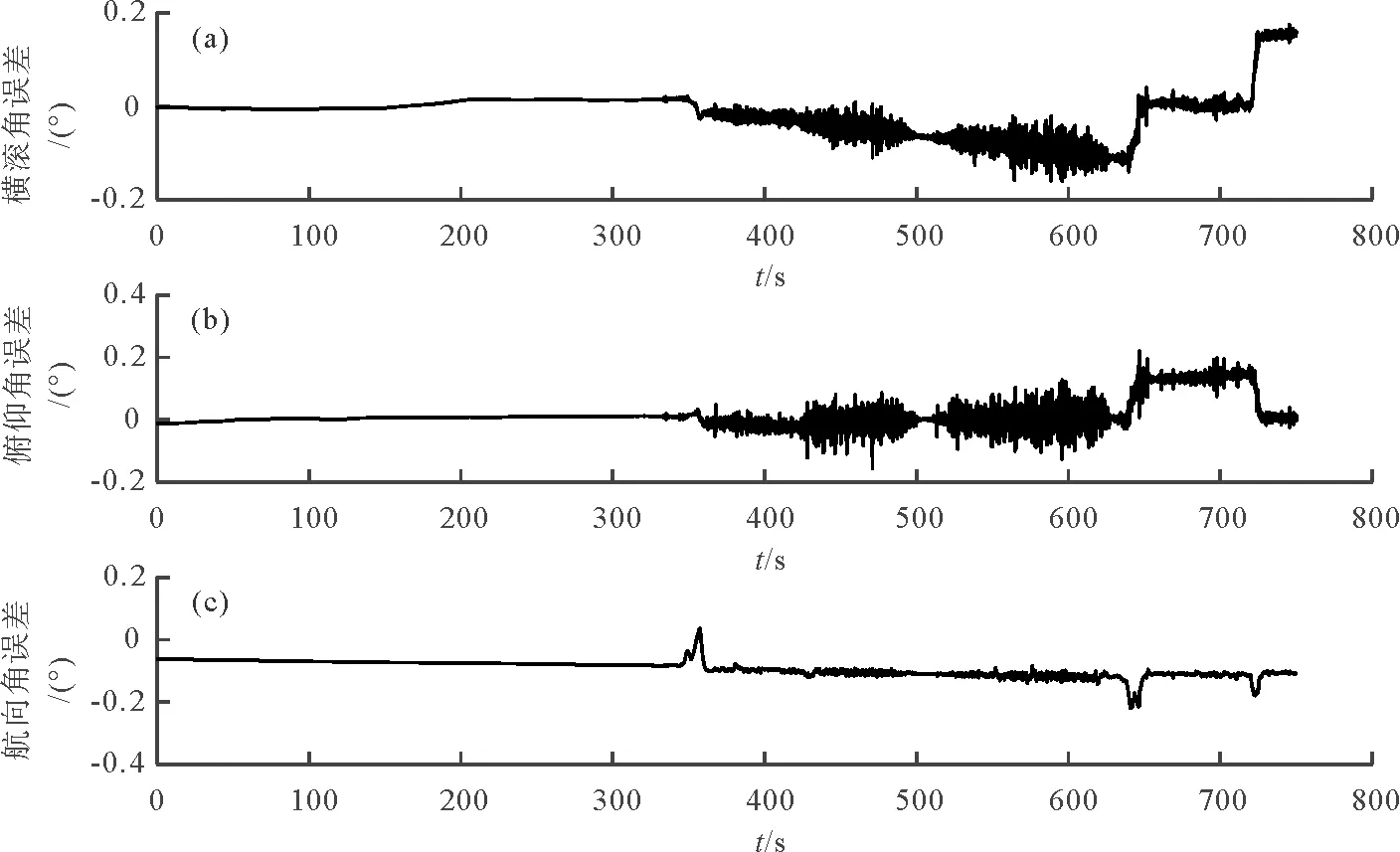
图 5 SINS姿态误差Fig. 5 The attitude error of SINS
由图3可以很明显看出,SINS单独导航时,其ENU三个方向的位置误差只在最开始的短时间内较小,但是随时间的增长,该误差不断累积,最后甚至达到几千米。同样,由图4可得,SINS导航在ENU三个方向的速度误差也随着时间存在不同程度的累积,其中U方向的速度误差累积最大,达到20 m·s-1。而由图5可得,SINS单独导航得到的三种姿态角误差没有随时间的增加不断累积。由此可知,SINS不适合单独导航,需要其他的导航系统的辅助才能消除累积误差。
4.2 GNSS/SINS组合导航实验
利用GNSS与SINS优势互补的特性,对SPAN-LCI战术级IMU惯导和GNSS采集的车载数据进行基于EKF算法的组合导航解算,得到GNSS/SINS组合导航系统的定位结果,通过与IE解算的结果比较后得到的位置误差、速度误差和姿态误差分别如图6~8所示。
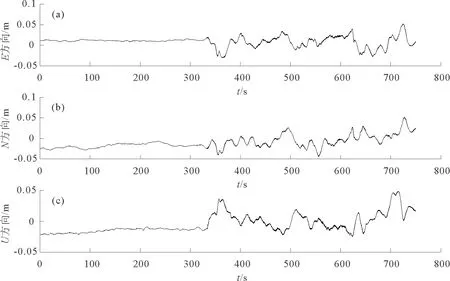
图 6 GNSS/SINS组合导航位置误差Fig. 6 The position error of GNSS/SINS integrated navigation
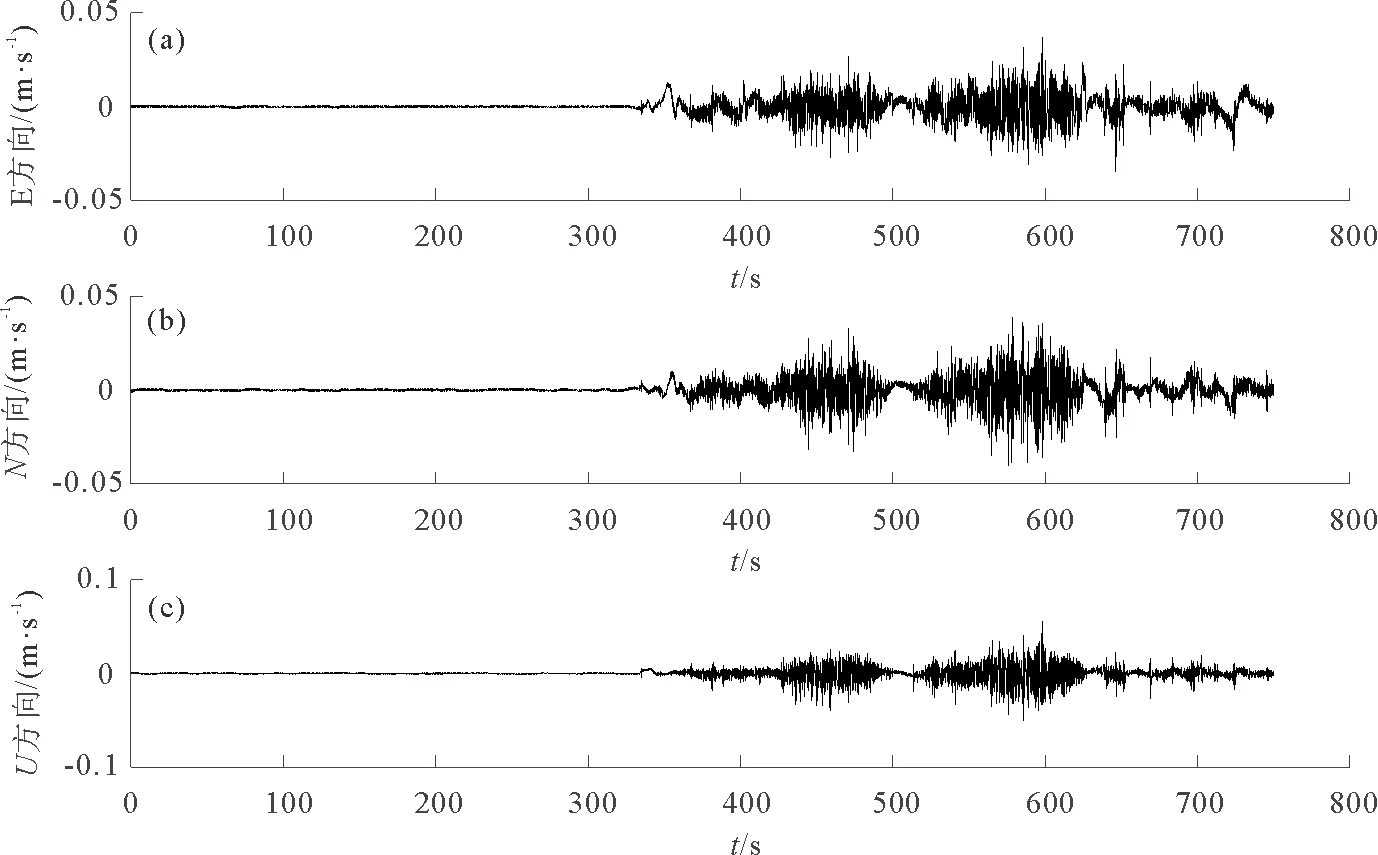
图 7 GNSS/SINS组合导航速度误差Fig. 7 The velocity error of GNSS/SINS integrated navigation
由图6可得,GNSS/SINS组合导航的ENU三个方向的位置误差都收敛了,其中位置误差的精度很高,一直保持在厘米级。通过图6与图3的对比可看出,GNSS/SINS组合导航比SINS单独导航在位置精度方面存在明显优势。由图7得,GNSS/SINS组合导航在E、N两个方向上的速度误差都保持在0.05 m·s-1以内,U方向上的速度误差也保持在0.1 m·s-1以内,与图4相比,GNSS/SINS组合导航的速度误差收敛了,并具有较高的精度。对图8与图5进行对比可以看出,GNSS/SINS组合导航的三种姿态角误差比SINS单独导航时精度稍有提高,其中横滚角误差提高了0.1°左右,俯仰角误差与航向角误差大概提高0.2°左右。尽管GNSS本身不能提供姿态信息,但是SINS与GNSS组合后能得到精度更高的姿态值。
通过对SINS单独导航、GNSS/SINS组合导航的车载实验解算分析可得,基于EKF的GNSS/SINS组合导航算法弥补了GNSS信号失锁、数据更新率低、无法获得姿态信息及SINS误差累积等单系统导航定位中的不足,其能够充分利用两者的优势,得到连续、高数据更新率和高精度的载体导航信息。
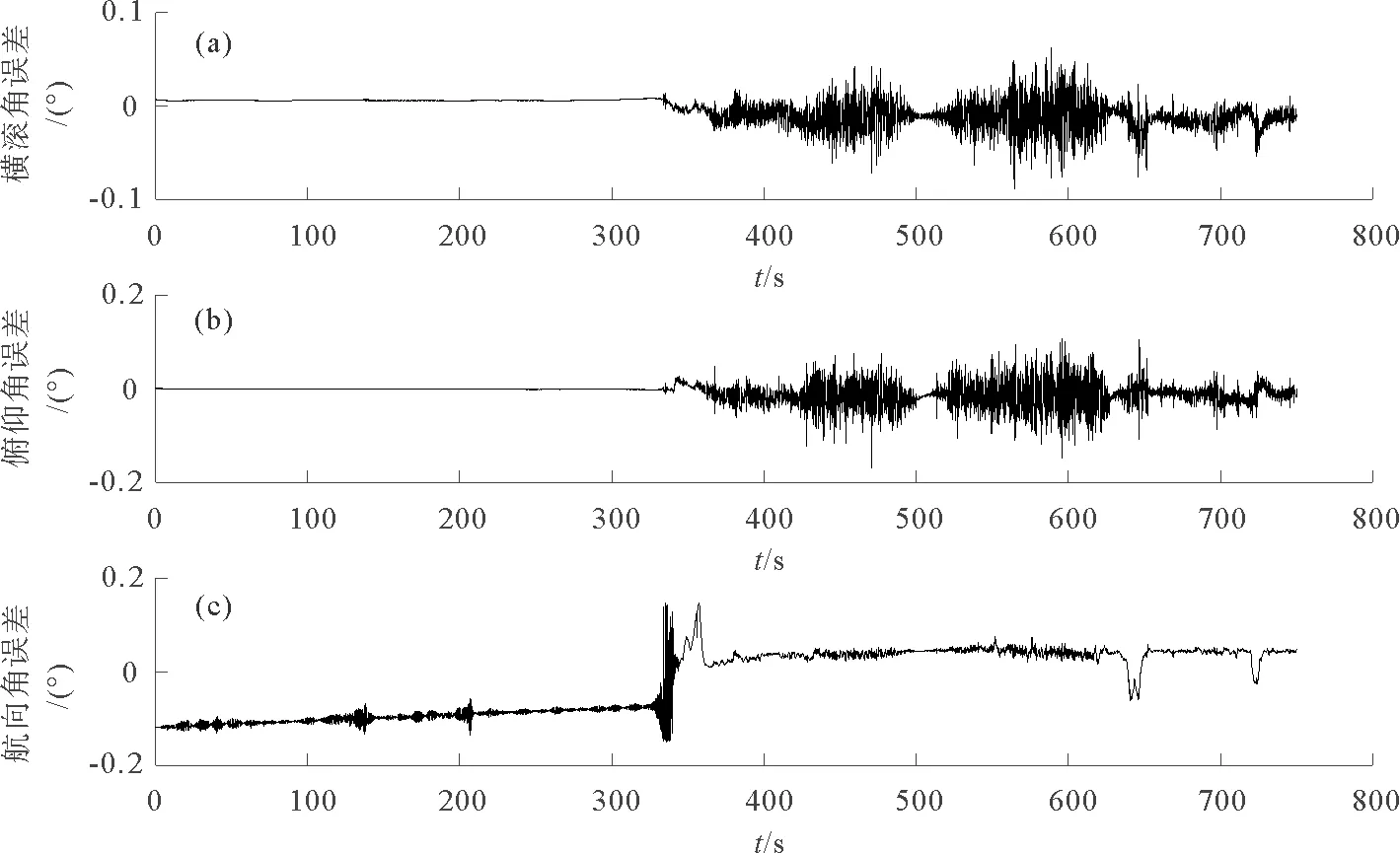
图 8 GNSS/SINS组合导航姿态误差Fig. 8 The attitude error of GNSS/SINS integrated navigation
5 结语
研究了基于EKF的GNSS/SINS组合导航算法,利用GNSS、SINS优势互补的特性,通过EKF算法将两者的定位信息进行融合。首先,研究了SINS、GNSS/SINS以及EKF算法方程,为组合导航算法的实现提供理论基础;其次,实验通过由NovAtel的SPAN-LCI战术级IMU惯导、双系统GNSS(GPS、GLONASS)接收机组成的车载设备进行数据采集,并分别对SINS导航、GNSS/SINS组合导航系统进行解算;最后,将通过自身组合导航算法解算的数据与高精度组合导航后处理软件IE 8.6解算的数据对比,得到GNSS/SINS组合导航解算的位置误差能快速收敛,且精度达到了厘米级,与SINS单独导航系统相比,该组合导航系统具有明显优势。本研究为以后组合导航融合系统的发展提供了一定的实验基础。
猜你喜欢
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
学生天地(2020年3期)2020-08-25 09:04:16
测控技术(2018年2期)2018-12-09 09:00:56
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14
