一种焊接机器人的仿真分析
2019-11-28 06:54杨丽华
装备制造技术 2019年9期
杨丽华
(广西大学机械工程学院,广西 南宁530004)
0 前言
工业机器人是一个新兴产业,作为一个包括机构学、电子控制学、智能化的综合性学科,近年来已经取得了很大的研究成果。本论文研究的是一种六自由度可控式焊接机器人。1973年,世界上第一台机器人诞生于美国,随后各国也大力推广工业机器人的使用[1]。国内外在工业机器人这方面有了大量研究。清华大学朱志明[2]等为了解决建筑工程自动化焊接问题研制了一种新型箱式焊接机器人。南京理工大学李精伟[3]对PR1400焊接机器人进行研究,并对其进行运动轨迹规划。Yuanfan Zeng[4]等人对工业机器人误差补偿的位置误差相似性进行了研究。Guanbin Gao[5]等对一种六自由度工业机器人的结构参数作了分析。机器人技术将成为社会生存和工业发展重要一部分,因此机器人比较具有研究前景。
1 可控式焊接机器人的结构设计
1.1 结构组成
这种可控式的焊接机器人利用电机驱动的方式,具有活动空间大,灵活性好的优点,能输出多样化的运动轨迹,也提高了焊接精度。利用平行四边形原理可以提高机器的整体刚度,使得其可控性变得更好。本文研究的焊接机器人主要由底座、主动杆、连杆、大臂、小臂、转动臂、摆臂、焊枪组成,其三维模型如图1所示。

图1 焊接机器人三维图
1.2 自由度的计算
机构自由度是分析运动机构的基础,机构自由度数计算公式:n为机构中活动构件数目,pl为低副数,ph为高副数。本焊接机器人活动构件数为10个,所以n=10,转动副是12个,pl=12,本机构都是转动副,没有高副,所以ph=0。代入自由度公式得,F=3×10-2×12=6,该机构存在一个虚约束,计算得该焊接机器人的自由度为5。
2 焊接机器人的仿真分析
2.1 刚性体建模
在焊接机器人的仿真中,会把机构视为刚体,刚体在受到力的作用下,不会产生任何变形。在solidworks中建立三维模型,导入到Adams软件中。通过环境设置,焊接机器人导入Adams的刚体模型如图2所示。

图2 焊接机器人导入Adams刚性体模型
将焊接机器人三维模型导入Adams后,定好各构件材料,添加约束并给约束副添加驱动函数,进行仿真分析,添加的驱动函数如表1所示。

表1 约束副添加驱动函数
在焊枪末端设置一个分析点,仿真后测量得到的焊接机器人主线各个关节的力矩图如图3~5所示。

图3 关节15的力矩图

图4 关节9力矩图
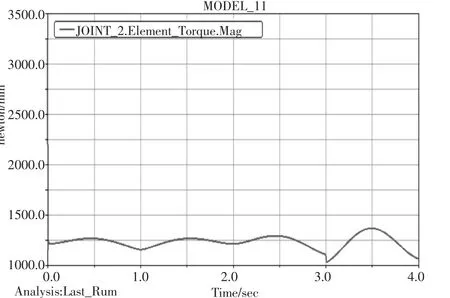
图5 关节2力矩图
通过上图可以得到焊接机器人各个主要关节的驱动力矩,驱动力拒可为电机为伺服电机选择提供理论依据。
运行仿真后可以看到焊接机器人的运动轨迹,在设置驱动函数后,转台圆周转动,主动杆来回摆动,转动臂转动,4 s后焊枪的运动轨迹如图6所示。

图6 焊接机器人轨迹图
2.2 柔性体建模
在大多数情况下把模型当作刚形体来处理不会产生很大的误差,与实际情况结果相比差异也比较小,是在误差范围之内的误差。如果机构都是用刚性体建模,可能不能达到机器精度要求。对于焊接机器人来说,微小的变形都会对焊接机器人的焊接精度产生一定的影响,从而降低焊接质量。所以在仿真时需要把部分构件作可以产生变形的柔性体处理。在ViewFlex中生成MNF文件,用生成的柔性体代替原来的刚形体,在进行仿真计算。在本文研究的焊接机器人中,大臂是主要受力构件,其变形的可能性会比较大,因此本文把大臂用柔性体替换原来的刚形体来研究系统的性能。通过点击Adams软件中建模工具条刚形体至柔性体的按钮,再替换其位置信息即可生成柔性体。
通过仿真,焊接机器人在刚形体和柔性体的末端位移曲线如图7所示。

图7 机器人刚性体柔性体末端位移对比曲线
在上图中,可以对比刚形体和柔性体的计算结果差异。虽然两条曲线几乎接近,但是还是可以清楚的看见其中的误差,也说明了这会直接影响到焊接精度。所以在进行仿真时需要考虑到机构的柔性体,避免仿真造成较大的误差。
3 结束语
本文通过基于一种新型可控五自由度焊接机器人建立三维模型并对其进行结构分析和自由度计算。并用Adams软件对焊接机器人进行仿真分析,分别建立其刚形体和柔性体模型,得到其仿真后计算结果的末端轨迹位移差异。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
中国特种设备安全(2022年2期)2022-07-08
石油沥青(2021年5期)2021-12-02
河北画报(2021年2期)2021-05-25
文化创新比较研究(2020年7期)2021-01-13
流行色(2019年7期)2019-09-27
流行色(2018年10期)2018-03-23
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15