基于信噪比-虚拟力算法的水下传感网络节点移动策略研究*
2019-11-27 05:16杨海波赵克华祝云凯
传感技术学报 2019年11期
杨海波,赵克华,祝云凯
(1.浙江树人大学信息科技学院,杭州 310015;2.浙江杭佳科技发展有限公司,杭州 310010)
水下无线传感网络(Underwater Wireless Sensor Networks,UWSN)是将低能耗、通信距离受限的节点部署在指定水域中,利用节点的自组织能力组网,对指定区域内的信息进行采集并完成相应的数据整理[1]。UWSN在海洋资源勘探、海洋环境监测以及海洋军事领域有广泛且重要的用途,已经引起工业界、学术界以及军事界的极大关注。
近年来,随着各国发展海洋经济热潮的不断兴起,UWSN已经成为无线传感器网络的热点研究领域。区别于传统无线传感网络(Wireless Sensor Networks,WSN),UWSN需要监测三维水域环境。由于水下环境复杂多变且仅能依靠衰落较快的声波信号传输信息,使得许多传统WSN的方法并不适用于UWSN[2]。尤其水下节点移动策略直接关系网络的节点能量、通信带宽、监测信息的准确性,成为UWSN众多研究方向的首要待解决问题。
虚拟力模型(Virtual Force Algorithm,VFA)是解决WSN节点移动策略的主要方法之一[3-7]。传统虚拟力模型通过采集邻居节点的信息,并与事先确定的阈值进行比较判断,确定节点所受斥力或者引力的大小及方向[3]。网络中的节点将根据所受力的大小及属性(引力或斥力)进行移动。李明等[4]以网络覆盖率最大为优化目标函数,提出一种解决异构WSN覆盖问题的虚拟力导向差分优化算法。在该算法中,节点间距离被用于关键指标并以指数函数形式建立虚拟力模型。区别于传统线性函数形式的虚拟力模型,指数函数能够增加算法收敛速度,减少计算用时。魏连锁等[5]对传统虚拟力模型进行改进,以网络节点的邻居节点数量以及到邻居节点的距离两项因素作为关键指标并以指数函数形式建立虚拟力模型,提出一种适用于WSN的锚节点移动策略。区别于传统虚拟力模型,采用双项指标构建指标函数有效地解决节点移动策略的多目标优化问题。传统虚拟力模型在UWSN中的应用主要体现于节点部署策略,尤其是提高网络覆盖率。由于UWSN特殊性使得难以在网络中实现确定性节点部署,虚拟力模型便可以实现节点动态部署。罗强等[6]在UWSN中引入虚拟力的概念作为节点部署的重要策略,以提高节点初始随机部署后的覆盖率。首先,将节点随机散布于UWSN;然后,通过计算节点间距离从而确定所受力的大小及方向。王军等[7]基于三维网格划分与虚拟力模型,提出了一种适用于UWSN的节点部署策略。在文章中,采用节点间距离作为关键指标并以线性函数形式构建虚拟力模型,从而实现UWSN节点动态部署策略。
综上所述,虚拟力算法制定的节点移动策略多以提高网络整体覆盖率为目标,而较少考虑网络吞吐量、网络生存时间等重要因素。本文基于传统虚拟力模型,提出一种以信道比与节点度双因素作为关键指标的虚拟力算法,并据此制定UWSN节点移动策略(SINR Virtual Force Algorithm,SVFA)。

表1 几种虚拟力构造方式对比表
1 节点模型与信道模型
1.1 节点模型
假设在UWSN中部署N个节点,且每个节点都具备相同的覆盖半径Rcov。在真实环境中,传感器可以监测以其自身为球心,以Rcov为半径的圆球内部数据信息。同时,每个节点都具备相同的通信半径Rcom,传感器可以与以其自身为球心,以Rcom为半径的圆球内部的其他节点进行通信业务。为了便于描述UWSN节点间的连通状况,引入一个0-1连通矩阵T=(tij)N×N,矩阵元素含义如下所示:
位置i与位置j的两个传感器节点三维坐标分别表示为(xci,yci,zci)与(xcj,ycj,zcj),i=1,2,…,N;j=1,2,…,N。连通矩阵元素计算方式如下:
(1)
定义本地节点通信范围内的邻居传感器节点数量为节点度[8]。因此,位置i的传感器节点度ndi计算公式如下所示:
(2)
覆盖率是UWSN节点部署与节点移动策略非常关注的一项指标。为描述UWSN覆盖状况,可以将网络离散成K×M×L的三维长方体网格。覆盖矩阵维度P为网络格点总数,P=(K+1)×(M+1)×(L+1)。引入覆盖矩阵F=(fij)N×P,矩阵元素含义如下所示:
位置i的传感器节点与位置j的探测点三维坐标分别表示为(xci,yci,zci)与(xgj,ygj,zgj),i=1,2,…,N;j=1,2,…,P。覆盖矩阵元素计算方式如下:
(3)
通过覆盖矩阵F=(fij)N×P可得网络中任何一个格点被覆盖的情况K=(ki)1×P,矩阵元素的计算方法如下:
(4)
将UWSN的覆盖效率定义为指定区域被覆盖格点数与网络格点总数之比[9]。网络覆盖效率指标g可以表达如下:
(5)
1.2 信道模型
UWSN节点之间正常通信不仅要求满足连通性指标tij=1,还要满足链路信噪比阈值要求[10]。因此,需要考虑信息传输的信道模型。当发送节点S向目的节点D发送信息时,处于目的节点D通信半径内的其他节点R1与R2将对节点S与D之间的通信产生干扰,如图1所示。
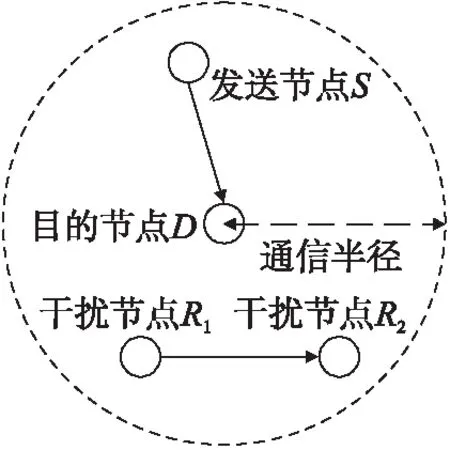
图1 网络传输干扰说明图
以hij表示从发送节点i向目的节点j发送信息时的信道增益,计算方法表示如下[11]:
(6)
式中:dij表示发送节点i与目的节点j之间的距离,α表示介质吸收系数,ρ2表示信道衰弱系数,A表示由于多径传输等因素引起的传输损耗。文献[12-13]指出在深水环境中多径衰落对水声信道的影响较小,可以忽略不计。因此,可以取A=0,ρ2=1。信道增益公式可以简化如下:
(7)
当发送节点i与目的节点j之间的信道信噪比SINRij满足如下条件时,两传感器节点间可以正常通信。信噪比计算公式如下:
(8)
式中:ri表示发送节点i的天线方向,ri∈[0,1],Pi表示发送节点i的信息发送功率,l表示干扰节点的标号,rlPlhljtlj表示目的节点通信范围内的干扰节点所产生的干扰功率,tlj的含义如式(1)所述,η表示信道噪声功率,β表示信道信噪比阈值。
2 基于信噪比的虚拟力模型
2.1 虚拟力的基本思想
假设UWSN每个节点都可以感知其通信范围内邻居节点的相关信息。虚拟力的基本思想可以归纳为:每个节点都将受到邻居节点的影响,这种影响以“力”的方式改变节点的移动方向以及速率。本节主要讨论与覆盖率指标相关的“节点度虚拟力”和与吞吐量指标相关的“信噪比虚拟力”设置方式。
UWSN节点分布不能过于密集,否则将造成网络覆盖率指标下降。为此,需要为每个节点配置节点度阈值Td。当邻居节点的节点度超过阈值时,说明该邻居节点周围有很多节点,本地节点将向远离该邻居节点的方向移动;当邻居节点的节点度低于阈值时,本地节点将向该邻居节点的方向移动,如图2所示。图中标号为1的节点通信范围内有4个邻居节点,可以感知此4个邻居节点的节点度。节点2和节点3 的节点度都低于阈值Td,节点1将向靠近节点2和节点3的方向移动;节点4和节点5的节点度都超过阈值Td,节点1将向远离节点4和节点5的方向移动。
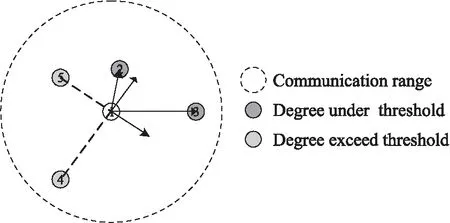
图2 节点度阈值示意图
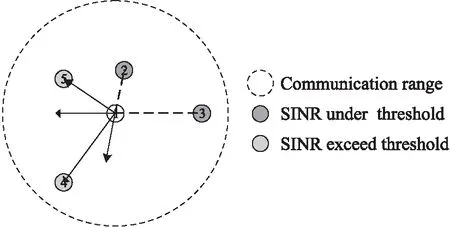
图3 信噪比阈值示意图
由于UWSN节点之间需要满足链路信噪比阈值才能正常通信,故需要为每个节点配置信噪比阈值β。当邻居节点与本地节点构成的链路信噪比超过阈值时,该节点将向邻居节点方向移动,以增强传输信号强度;当邻居节点与本地节点构成的链路信噪比低于阈值时,该节点将向远离邻居节点方向移动,如图3所示。图中标号为1的节点通信范围内有4个邻居节点,可以感知此4个邻居节点的信噪比。节点2和节点3 的信噪比都低于阈值β,节点1将向靠近节点2和节点3的方向移动;节点4和节点5的信噪比都超过阈值β,节点1将向远离节点4和节点5的方向移动。综上所述,节点1的移动方式受到两项阈值的影响。
2.2 虚拟力参数设定
节点度阈值设定是为使得节点位置均匀地分布于UWSN。因此,可以将节点位置均匀分布时,节点度的期望值作为阈值Td。在区域体积为V的UWSN中部署N个节点,节点度的期望计算方式如下二项分布公式所示:
(9)
借鉴Logistic函数[13],定义“节点度虚拟力”和“信噪比虚拟力”为取值范围[0,1]的指数有向函数。定义时刻t邻居节点j对本地节点i的“节点度虚拟力”αij(t)计算方式如下:
(10)

当邻居节点的节点度小于阈值时,“节点度虚拟力”的方向与ij相同,表示向靠近邻居节点的方向移动。此时,邻居节点的节点度越小,虚拟力越大。当邻居节点的节点度等于1时,“节点度虚拟力”达到最大值为1。当邻居节点的节点度大于阈值时,“节点度虚拟力”的方向与ji相同,表示向远离邻居节点的方向移动。此时,邻居节点的节点度越大,虚拟力越大。当邻居节点的节点度等于阈值时,“节点度虚拟力”不会对本地节点的移动方式产生作用。
定义时刻t邻居节点j对本地节点i的“信噪比虚拟力”γij(t)如下:
(11)
当本地节点与邻居节点构成的链路信噪比低于阈值时,“信噪比虚拟力”的方向与ij相同,表示向靠近邻居节点的方向移动;当本地节点与邻居节点构成的链路信噪比大于阈值时,“信噪比虚拟力”的方向与ji相同,表示向远离邻居节点的方向移动;当本地节点与邻居节点的链路信噪比等于阈值时,“信噪比虚拟力”不会对本地节点的移动方式产生作用。
在时刻t本地节点i的虚拟力ri(t)为所有邻居节点所施加的“节点度虚拟力”和“信噪比虚拟力”之和:
(12)
时刻t本地节点i的移动方向与虚拟力ri(t)的方向一致,移动速度的计算方法如下所示:
(13)
式中:vmax表示每个节点允许移动的最大速度,vi(t)为时刻t节点i的移动速率,|ri(t)|表示时刻t节点i所受到虚拟力的数值。由于|ri(t)|是ndi个“节点度虚拟力”与ndi个“信噪比虚拟力”的合力,|ri(t)|/(2ndi)的取值范围为[0,1]。
3 仿真分析
为评价本文所提出的算法效果,本文采用MATLAB 软件进行数值仿真。针对一个60 m×60 m×60 m水下区域随机散布100个传感器节点,节点按照算法制定的移动策略进行移动。假设网络中节点的覆盖半径为15 m,通信半径为20 m,信道信噪比阈值为20 dB。假设每个节点在单位仿真时间内的最大移动速度为1 m,网络中所有节点的初始能量为5 J。
将文献[6]中的传统虚拟力模型VFA、文献[5]中的修正虚拟力模型DVFA作为本文所提出SVFA的对比算法。仿真600个单位时间,传感器节点在每个仿真时间移动一次,网络覆盖率随时间变化趋势如图4所示。同时,对于在网络中部署不同数量的传感器节点,并采用三种不同节点移动策略得到网络最终覆盖率如图5所示。
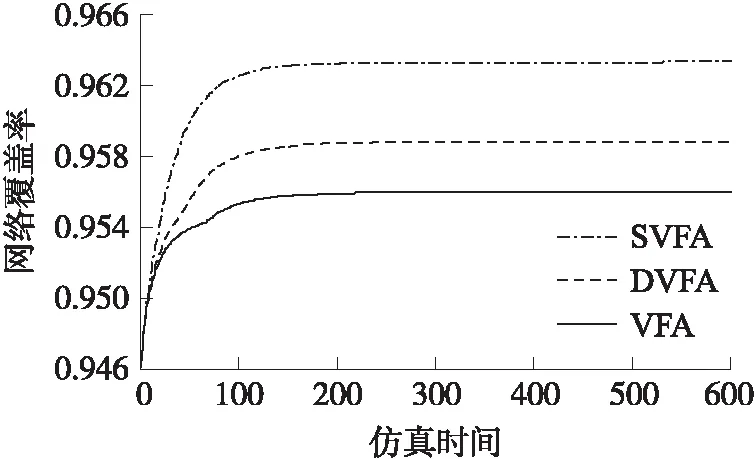
图4 网络覆盖率随仿真时间变化趋势图
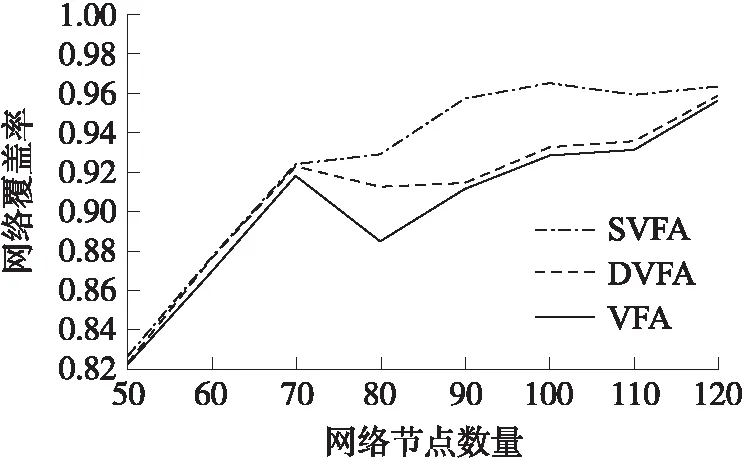
图5 网络覆盖率随节点数量变化趋势图
图4显示:在三种不同虚拟力模型所制定的节点移动策略下,随着仿真时间推移,网络覆盖率快速提升,并在仿真后期逐渐趋于稳定。本文所提出的SVFA在覆盖率上的表现优于DFVA和VFA,可以实现更高的网络覆盖率。此三种虚拟力模型中都考虑以节点间距离或者节点度作为关键指标,这些因素在一定程度上能够保障网络覆盖率。图5显示:网络覆盖率随着节点数量增加而增加,本文所提出SVFA使得网络覆盖率稍高于其他两种策略获得的网络覆盖率。其中,图5中VFA曲线出现的抖动是由于随机仿真所造成的。
当在网络中部署100个传感器节点时,单位时间网络吞入量随时间变化情况如图6所示。定义网络中能量最低的节点为瓶颈节点,瓶颈节点能量百分比随仿真时间变化情况如图7所示。
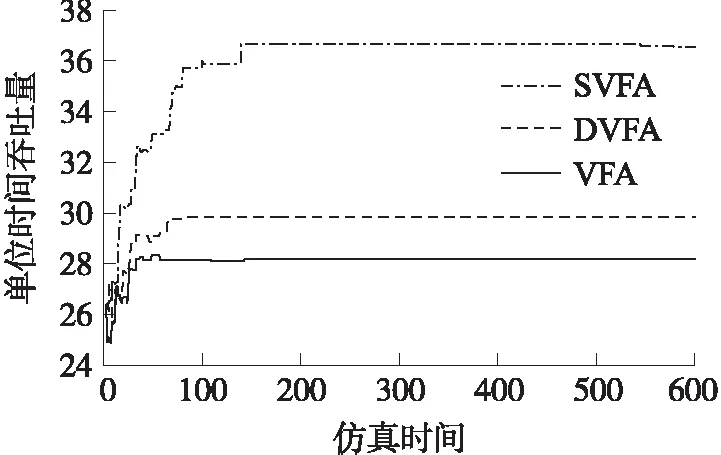
图6 网络吞吐量随仿真时间变化趋势图
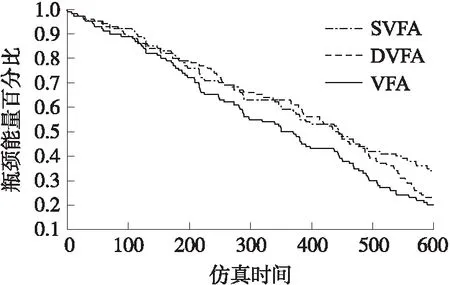
图7 网络瓶颈能量变化随仿真时间变化趋势图
图6显示:在三种不同虚拟力模型所制定的节点移动策略下,随着仿真时间推移,网络吞吐量明显增加。本文所提出的SVFA在覆盖率上的表现明显优于DFVA和VFA,可以获得更高的网络吞吐量,这是由于DFVA和VFA在构造过程中并未考虑链路信噪比所造成。图7显示:在三种不同虚拟力模型所制定的节点移动策略下,网络瓶颈能量下降速度较为接近,本文所提出的SVFA在延缓瓶颈节点能量下降方面稍显优秀。
4 结束语
本文提出一种基于信噪比的虚拟力算法。首先,考虑水下网络信道传输特性,构建信道信噪比数学模型;然后,以信噪比和节点度双指标修正传统虚拟力模型,并制定节点移动策略。结果显示:相比于传统节点移动策略,本文所提出的移动策略可以有效提升网络吞吐量,延长网络生存时间。
猜你喜欢
今日农业(2022年15期)2022-09-20
现代仪器与医疗(2022年1期)2022-04-19
今日农业(2021年21期)2021-11-26
北京航空航天大学学报(2019年9期)2019-10-26
雷达学报(2017年3期)2018-01-19
系统工程与电子技术(2016年7期)2016-08-21
西南交通大学学报(2016年6期)2016-05-04
林业与生态(2016年2期)2016-02-27
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
华东理工大学学报(自然科学版)(2015年4期)2015-12-01