基于RFCM的PolSAR图像机场跑道区域检测方法
2019-11-27 07:46:20韩绍程
中国民航大学学报 2019年5期
程 争 ,韩 萍 ,韩绍程
(中国民航大学 a.基础实验中心;b.电子信息与自动化学院,天津 300300)
极化合成孔径雷达(PolSAR,polarimetric synthetic aperture radar,以下简称极化SAR)通过发射和接收不同极化方向的电磁波来获取地物的极化信息,其不受天气、光照等因素干扰,可全天时、全天候监测地面目标,因此极化SAR广泛应用于目标检测领域,如舰船检测、城区检测、机场检测、海岸线检测、地貌变化检测、海冰分类等。
机场作为一项重要的国民经济基础设施,其自动检测技术研究受到了越来越广泛的关注[1]。跑道是机场的核心设施,具有稳定且典型的特征,许多学者通过检测机场主跑道来确定机场位置信息。文献[2]根据Freeman分解理论选取合适的类中心,并直接计算像素与类中心的维希特(Wishart)分布距离,最后把像素划分到距离最小所对应的类中。文献[3]采用模糊C均值聚类算法(FCM,fuzzy C-means)筛选出非跑道类像素点,再利用K-means-Wishart方法对图像进行精细分类,降低了聚类分析的运算量。文献[2-3]的两种方法均根据跑道的弱散射特性从分类结果中提取感兴趣区域(ROI,region of interest),并利用跑道的结构征特进行辨识,取得了较好的检测结果。受成像分辨率的影响,极化SAR图像中跑道边缘处的像素点可能是不同地物的混合,其类别具有一定模糊性。而文献[2-3]简单地将像素划分到某一具体的类中,可能会导致边缘像素点误分类,进而影响目标检测的精确度。模糊聚类方法允许像素以一定的隶属度同时隶属于多个类别,分类更加合理。但模糊聚类算法对初始类中心敏感,不同的类中心可能导致不同的分类结果,好的类中心可以加速迭代过程的结束。
针对以上问题,提出了一种基于鲁棒模糊聚类的极化SAR图像目标检测方法。首先,利用极化分解理论提取极化特征信息,按照一定极化差异分类策略对原始图像粗分类,各类地物特征信息均值处理后作为后续分类器的初始类中心;然后,采用鲁棒模糊聚类算法对图像进行模糊分类,并根据机场跑道的弱散射随机特性从分类结果中提取ROI;最后,利用跑道的结构特征对ROI进行辨识,确定跑道区域位置。
1 鲁棒模糊C均值聚类算法
鲁棒模糊C均值聚类算法是一种不需要标记样本信息的聚类算法,其通过使目标函数最小化对图像进行最优化分类。假设一幅原始图像X为

其中:i为像素索引号;N为图像中总像素个数;xi为图像中第i个像素的特征矢量。则目标函数定义为

其中:C为聚类中心的个数;uik为第i个像素属于第k类的隶属度,并且满足约束条件0≤uik≤1和m为用于控制模糊程度的模糊因子,一般设置大小为2;dik为第i个像素到第k类中心的距离;ρ(·)为Huber函数,即

为使目标函数Jm最小,引入拉格朗日算子对目标函数求解,令

在约束条件下,x分别对uik和λi求导,可得隶属度uik和聚类中心vk表达式为
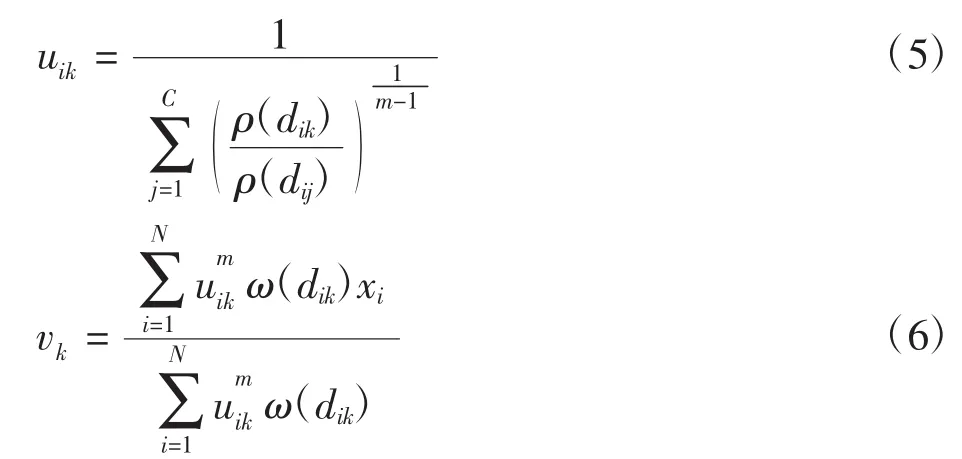
其中:Huber权值函数ω(dik)作用是逐渐降低噪声点的影响,其值与距离dik有关。由式(3)的Huber函数,则权值函数ω(dik)定义为

极化SAR数据服从复Wishart分布,因此鲁棒模糊聚类算法采用Wishart距离作为度量像素与聚类中心相似度的距离因子。因传统的Wishart距离度量方式涉及矩阵求逆和乘法运算,运算量大,且不利于大尺度图像处理。因此,以下将给出一种可快速计算的Wishart距离。
2 基于复Wishart分布的距离度量因子
极化SAR数据服从复Wishart分布,由其分布推导而来的Wishart距离具有良好的性能,在极化SAR领域得到了广泛应用。假设极化SAR图像中每个像素点由一个3×3的相干矩阵T表示,则任一像素点T与聚类中心 Vm的 Wishart距离 d(T,Vm)可表示为

其中:|·|和Trace(·)分别为矩阵的行列式和求迹运算;为矩阵求逆运算。
从数学上分析,Wishart距离因子的运算量主要在于求迹运算,这个过程包含了求逆、矩阵乘法以及求和运算。传统上,的计算方式是先进行矩阵乘法得到新矩阵内全部元素,然后再计算得到新矩阵的迹。在已知聚类中心逆的情形下,该计算过程需要27次乘法运算和20次加法运算。而矩阵的迹仅与其对角线元素有关,传统的计算方法包含了大量冗余运算。因此,鲁棒模糊聚类算法采用一种可快速矩阵求迹的方式[4],通过降低冗余运算量来提高Wishart距离的运算速度。
将极化SAR图像中每个像素点T进行矢量化处理,得到一个1×9的行向量Tnew,表示为



其中:矩阵的迹简化成两个1×9的矢量乘法,该过程需要9次乘法和8次加法运算,运算量约为传统计算方式的1/3,极大地提高了计算效率。至此,Wishart距离可表示为

3 基于RFCM的检测方法
基于鲁棒模糊聚类算法(RFCM,robust fuzzy C-means clustering)的检测方法主要由3部分组成:①初始类中心的选取;②改进模糊聚类算法对原始PolSAR图像分类并提取ROI;③ROI辨识。该检测方法的流程如图1所示。

图1 检测算法流程图Fig.1 Flowchart of proposed detection method
3.1 初始类中心的选取
模糊聚类方法对初始类中心敏感,合适的类中心可提高分类的精度和速度。针对聚类算法对初始中心敏感的问题,结合极化散射熵和Freeman三分解理论对极化SAR图像粗分类以得到合适的类中心,分类策略如表1所示。其中极化散射熵(Entropy)和Freeman分解中的表面散射分量Ps、偶次散射分量Pd、体散射分量Pv的计算方法参考文献[2]。按照分类策略将原始极化SAR图像分为10类,每一类样本的极化相干矩阵均值作为该类别的初始类中心。通过极化SAR数据的特性筛选初始类中心,而非随机筛选,这有利于加快迭代聚类的收敛速度,避免陷入局部最优解。
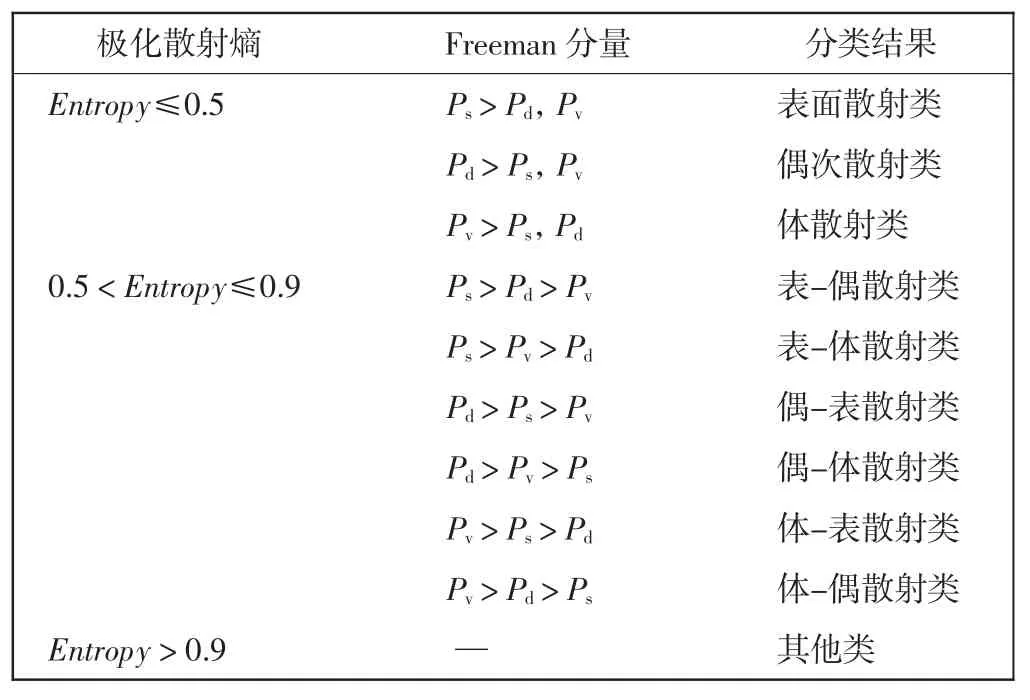
表1 粗分类种类及判决条件Tab.1 Types and judgment conditions of coarse classificaiton
3.2 极化SAR图像分类与ROI提取
利用RFCM对PolSAR图像进行精细分类,待分类过程结束后,根据机场跑道的弱散射特性从分类结果中提取ROI,具体步骤如下。
1)输入 包括:极化SAR数据,初始类中心,最大迭代次数iter=100,误差系数ε=1×10-5。
2)计算Wishart距离度量因子 根据式(12)计算图像中每个像素点与聚类中心之间的距离。
3)更新隶属度与聚类中心 根据式(5)求得像素点与各类别中心的隶属度矩阵,再根据式(6)计算得到新的聚类中心,作为下次迭代过程的输入。
4)迭代终止 当聚类迭代次数iter大于给定阈值itermax或相邻2次迭代得到的隶属度矩阵变化error小于给定阈值ε时,则终止迭代过程。按照最大隶属度准则,将像素点划分到隶属度最大对应的类中,并给像素点分配一个类别标签,输出分类结果。否则,返回步骤2),继续执行。
5)ROI提取 图像分类结果输出后,计算各类样本功率的均值。根据机场跑道的弱散射特性,提取功率均值最小所对应的类别样本作为ROI。ROI中的像素用数字1表示,其他像素用数字0表示,得到一幅二值图。二值图经过形态学滤波处理,去除大量非跑道类小区域后,保留的区域作为下一检测环节的输入。
3.3 ROI的辨识
根据机场跑道区域的弱散射特性提取的ROI中,除包含民用机场跑道区域外,还可能包含与跑道类像素点散射特性相似的地物,如河流、道路等。为了确定最终跑道区域,RFCM方法利用机场跑道的长宽特征、拓扑特征[5]E和平行线特征[6]Dis对疑似跑道区域作进一步筛选。
4 实验分析
为了评估RFCM方法的性能,利用美国半月湾地区的实测数据进行实验,并采用Freeman分解结合Wishart分类器的检测方法(Freeman-Wishart)和传统FCM结合Wishart距离的检测方法(FCM-Wishart)作为对比。实验数据由美国UAVSAR(Uninhabited Aerial Vehicle SAR)系统采集,空间分辨率为7.2 m×4.9 m(距离向×方位向)。美国半月湾地区极化图像如图2(b)所示,图像大小为501×701。图像中除一个机场外,还包括城镇、河流、公路、农田、草地等地物。实验参数设置为:形态学处理阈值为Th0=450;拓扑特征E、平行线对数Dis的阈值分别为0、10。所有实验均在Windows 10操作系统,i5处理器,8G内存的Dell OPTIPLEX 3010台式机上运行。运行软件为64位Matlab 2018。
通过视觉分析与定量分析两种方式来对比3种方法的性能。后者通过计算检测结果的精度指标来实现包括:召回率和精确率、综合评价指标F-Score和检测时间。为了能对检测结果进行定量分析,参照半月湾地区的光学图像,制作该地区的真值图,如图2(c)所示。

图2 美国半月湾地区图像Fig.2 Images of Half Moon Bay in America
4.1 视觉分析
3种方法在分类、ROI提取、ROI辨识阶段的结果如图3~图5所示。经过无监督迭代聚类后,机场跑道区域的内部结构清晰地与周围地物分离,便于后续进一步辨识。其中,FCM-Wishart方法采用基于欧氏距离的FCM算法对原始图像粗分类,结果显示机场跑道区域与机场内部草坪混为一类,如图5(a)白色矩形框所示。FCM-Wishart方法需采用数据分布特性的Wishart距离进一步分类,结果如图5(b)所示。此外3种方法在细节部分均有所欠缺,如图 3(a)、图 4(a)和图 5(b)中白色椭圆和菱形选中的区域。首先,白色椭圆区域内的机场滑行道有部分缺失,原因是滑行道上存在的物体改变了该区域的散射特性,从而导致该区域内像素误划分到非跑道类;其次,白色菱形选中的区域内的跑道与草地混为一类,原因是二者的极化散射特性非常相似,这与图2(b)Pauli图相符合。仅依靠Wishart距离无法有效识别二者的类别,后续将针对这一问题继续改进算法。根据机场跑道区域的弱散射特性,从各算法分类结果中提取ROI,提取结果如图3(b)、图4(b)和图5(c)所示。其中FCM-Wishart对比算法提取的机场ROI存在部分缺失,原因是该区域有强烈的相干斑噪声。而RFCM的方法提取区域则比较完整,说明该方法抗噪声性能要优于FCM-Wishart对比方法。提取结果中不仅包含了较完整的跑道区域,还包含河流、道路等与跑道区域极化特性相似的地物。各方法继续采用跑道结构特征对ROI进一步辨识,检测结果如图3(c)、图 4(c)和图 5(d)所示。3 种方法都有效筛选排除了非跑道类区域,确定了机场跑道区域最终位置。

图3 RFCM方法检测结果Fig.3 Detection result of proposed RFCM method
4.2 定量分析

图4 Freeman-Wishart算法检测结果Fig.4 Detection result of Freeman-Wishart method
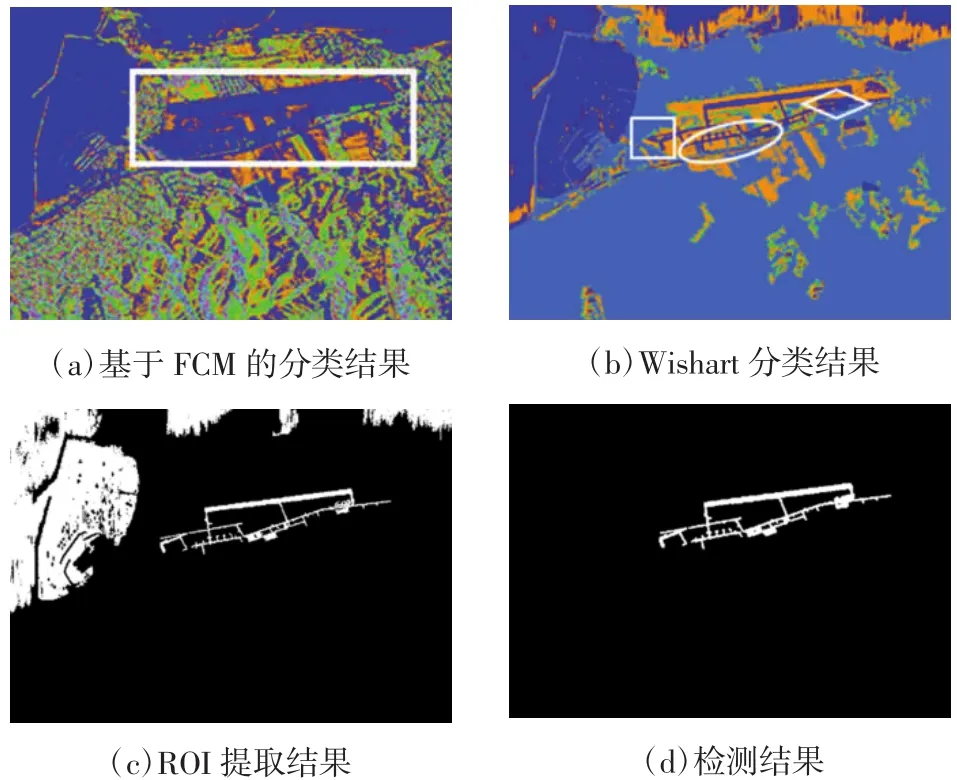
图5 FCM-Wishart算法检测结果Fig.5 Detection result of FCM-Wishart method
针对半月湾地区数据,3种方法的精确率、召回率、F-Score和检测时间数据,如表2所示。3种检测方法中,RFCM方法的召回率略高于Freeman-Wishart方法,达到84.85%,FCM-Wishart方法最低,这表明RFCM方法检测出的机场跑道区域的完整性较好。在3种方法都检测出机场跑道区域且无虚警目标的情形下,RFCM方法的精确率达到80.66%,远高于其它两种对比方法。数据表明,针对跑道与其它地物交界处的像素,基于鲁棒模糊聚类的方法能够更好地诠释地物的类别属性。综合精确率和召回率两个指标分析,RFCM方法的F-Score分数为82.70,整体性能优于其它两种方法。另外在目标检测效率上,FRCM方法的整个检测过程耗时35.81 s,用时最短,是Freeman-Wishart方法检测时间的2.84%(1 258.39 s),是FCM-Wishart方法检测时间的14.67%(244.06 s)。数据说明,基于Wishart距离的分类算法运算量主要集中在Wishart距离的计算上。RFCM方法采用优化的Wishart距离对极化SAR图像分类,去除了传统Wishart距离计算中大量的冗余运算,极大地提升了目标检测效率。
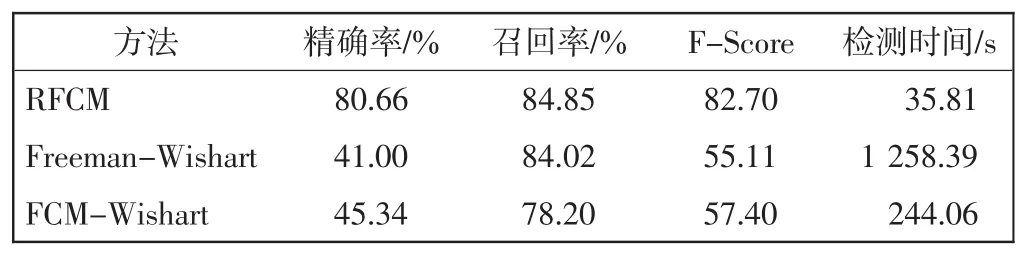
表2 半月湾地区检测结果定量分析Tab.2 Quantitative analysis of detection results in Half Moon Bay area
5 结语
针对极化SAR图像存在相干斑噪声和像素类别模糊的问题,提出了一种基于RFCM的PolSAR图像目标检测方法。该方法以基于极化散射熵和Freeman极化目标分解理论生成的分类结果作为初始化输入,通过求解目标函数最小化问题,迭代交替更新隶属度和聚类中心,直至满足迭代终止条件输出分类结果。再利用跑道结构特征辨识自适应提取的ROI区域,确定机场跑道区域位置。真实的PolSAR实验数据检测结果表明,与其他几种检测方法相比,该方法具有更高的检测精确率和效率。相邻像素具有相关性,但该方法未考虑这种空间上下文信息。在下一步的研究工作中,空间上下文信息将引入到目标函数中,提高算法对相干斑噪声的鲁棒性,以获得更佳的检测效果。
猜你喜欢
艺术家(2023年8期)2023-11-02 02:05:28
建材发展导向(2022年14期)2022-08-19 02:08:22
现代财经-天津财经大学学报(2022年5期)2022-06-01 06:08:32
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:30
成都信息工程大学学报(2021年5期)2021-12-30 06:25:28
红领巾·萌芽(2019年8期)2019-08-27 15:30:15
电子测试(2017年15期)2017-12-18 07:18:51
CHIP新电脑(2016年3期)2016-03-10 14:22:03
电源技术(2015年1期)2015-08-22 11:16:18
电子设计工程(2015年3期)2015-02-27 12:04:04