基于改进下垂理论的虚拟同步发电机控制策略
2019-11-22 07:15:00曾航航苏宏升
三峡大学学报(自然科学版) 2019年6期
曾航航 苏宏升
(兰州交通大学 自动化与电气工程学院, 兰州 730070)
为缓解能源短缺和环境污染带来的影响,光伏、风电等新能源发电系统得到大量推广[1-2].然而分布式发电系统的间歇性和波动性会对电网运行产生冲击,为减小这种影响,以分布式发电为主的微电网概念被提出.微电网能够平抑分布式发电系统的间歇性和波动性,对分布式能源的应用具有重要意义,因此得到国内外学者的大量关注[3-4].
微网逆变器作为连接分布式发电系统与微电网的主要电力电子装置,由于其低阻尼与低惯性的特性,使得微电网孤岛运行时面临着频率波动和电压波动等问题[5-6].现有的孤岛微电网运行模式主要有两种,一种是基于V/f控制的主从控制,该控制方法具有稳定频率和电压的优点,但对主控单元要求较高,不易于系统的扩容,因此实际中应用较少[7].另一种是基于下垂控制的对等控制,下垂控制可以模拟同步发电机的静态特性,实现微电网的一次调频和一次调压,但下垂控制不具备同步发电机的转子惯性和阻尼特征,通过这种控制方法并网时,系统频率抵御负荷扰动能力较差[8].通过在下垂控制中引入转子运动方程,使得并网逆变器在机理和外特性上更接近同步发电机,更好地模拟同步发电机的运行特性,这就是所谓的虚拟同步发电机(VSG)控制[9].
本文通过对下垂控制和VSG控制的基本原理进行分析,从而得出两者之间的相同点和不同点.此外还建立了VSG控制的数学模型,且基于下垂控制的参数设计原理,得出了VSG控制模型的参数设计方法.最后,利用Matlab/Simulink建立了两种控制方法的仿真模型,比较二者的仿真运行特性,而且通过仿真结果分析了各参数对VSG控制的影响,为在VSG控制中引入下垂控制的研究成果提供了理论支持.
1 下垂控制基本原理
下垂控制的原理是各逆变器检测输出功率的大小,根据自身容量,通过频率与电压幅值来调节输出的有功和无功功率.逆变器通过下垂控制得到输出电压频率和幅值的指令值,然后微调其输出电压幅值和频率达到系统有功和无功的合理分配[10].下垂控制的本质为输出功率的负反馈控制,其主电路拓扑和控制结构如图1所示.

图1 下垂控制主电路拓扑
图2为下垂控制的控制框图,其有功-频率和无功-电压的数学关系式如下:
ωN-ω=-Dp(Pref-P)
(1)
UN-Uref=-Dq(Qref-Q)
(2)
式中,Pref、Qref为有功和无功功率给定值;P、Q为输出的有功和无功功率;Dp、Dq分别为有功频率下垂系数和无功电压下垂系数;ωN表示额定角频率,UN和Uref表示额定电压和给定电压.由上式可知,下垂控制可以模拟同步发电机的静态特性,当系统负荷发生变化时,下垂控制通过改变逆变器电压和频率来调节输出功率,以满足系统变化.由于其控制结构简单和较高的灵活性,在分布式能源并网中应用广泛.

图2 下垂控制框图
2 VSG控制基本原理
VSG控制的本质是在逆变器的控制上引入同步发电机转子运动方程和定子电气方程,使逆变器获得类似同步发电机的惯性、阻尼、频率和电压调整等特性[11],其主电路拓扑和控制结构如图3所示.

图3 VSG控制主电路拓扑
2.1 有功-频率控制
同步发电机由于转子惯性的存在,可以防止系统频率产生突变,因此将其转子运动方程引入逆变器的控制算法中便得到了VSG的有功-频率控制方程[12].假设极对数为1,则机械角速度和电角速度相等,VSG的有功-频率控制方程可表示为:

(3)
式中,ωN和ω分别为额定角频率和实际转子角频率;Pm和Pe分别为VSG的机械功率和电磁功率(即逆变器输出功率P);J为转动惯量;D为阻尼系数;δ为功角.
为了简化分析,一般假设机械功率Pm等于有功功率给定值Pref,由式(3)可得式(4)、(5).

(4)
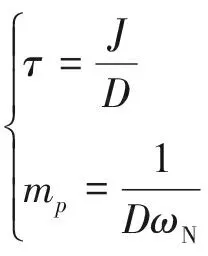
(5)
式中,τ和mp分别为一阶惯性时间常数和有功-频率下垂系数.
对比式(1)和式(4),可见VSG的有功-频率控制本质上也属于下垂控制,只不过较下垂控制的有功-频率控制其增加了一个一阶惯性环节,使得VSG控制不仅具备与下垂控制同样的静态性能,而且拥有更好的动态性能.
由上述分析可知,在逆变器控制算法中引入式(3)可模拟同步发电机的转子运动方程,为系统提供惯性和阻尼支撑;式(4)和式(5)使VSG有功-频率控制具备一次调频特性,且能实现多微源间的有功功率按容量分配.
2.2 无功-电压控制
VSG的无功-电压控制主要基于无功功率与电压的下垂关系[13],从而得到给定输出电压Uref,使得逆变器具备一次调压特性,其表达式为:
Uref=UN+mq(Qref-Q)
(6)
式中,UN为额定电压;Qref和Q分别为给定无功和输出无功;mq为无功-电压下垂系数.
总的来说,VSG控制的设计思路就是将同步发电机的频率和电压控制引入到逆变器的控制算法中,通过模拟同步发电机的运行特性来提高系统稳定性[14].图4为VSG的控制框图.
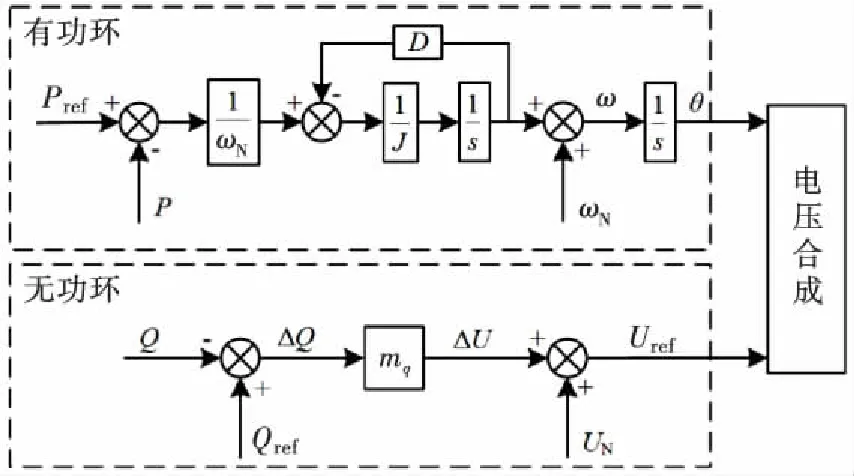
图4 VSG控制框图
3 VSG参数设计
VSG需要设计的参数为转动惯量J、阻尼系数D和无功-电压下垂系数mq.根据前文分析可知,VSG控制本质上也属于下垂控制,且与下垂控制拥有同样的静态特性,故其下垂系数mp和mq可以参考下垂控制的参数设计方法,然后由式(5)得出阻尼系数的取值.此外,根据系统稳定性和动态性的要求可以求出转动惯量J的取值范围.
3.1 D和mq的设计
由于下垂系数的设计是由相应的电网标准决定的,故VSG的下垂系数mp和mq可由下述表达式求得:

(7)

(8)
由式(5)和式(7),可推导出求阻尼系数D的表达式为:

(9)
3.2 J的设计
要使VSG具备提供惯性的能力,J的取值必须大于0.由2.1的分析可知,VSG控制较下垂控制增加了一阶惯性环节,其一阶惯性时间常数τ由转动惯量J和阻尼系数D决定.根据3.1的方法可以确定阻尼系数D的取值,此时一阶惯性时间常数τ和转动惯量J成正比关系,随着J的增大,一阶惯性时间常数增大,系统惯性也就越大.然而,当惯性太大时,系统在受扰动后的频率恢复到额定值的时间也相应增加,不利于系统稳定,故J的取值不能太大.
3.3 设计实例
根据微网运行标准,设定微网频率变化在49.8~50.2 Hz之间,电压幅值变化在正负1%之间,逆变器输出有功功率变化100%(20 kW),输出无功功率变化100%(10 kVar).根据3.1的设计方法有:

(10)

(11)

(12)
4 仿真分析
本文基于Matlab/Simulink软件平台搭建了下垂控制和VSG控制的仿真模型.主电路采用如图1和图3所示的拓扑结构,为了对比两种控制方法的控制效果,设定相同的主电路参数,其中输入电压Udc=800 V,额定电压UN=311 V,电感L=9 mH,滤波电容C=500 μF,电压环控制参数kup=10,kui=100,电流环控制参数k=5.
初始时刻系统带负载Load1(P1=30 kW,Q1=0 kVar)和Load2(P2=20 kW,Q2=10 kVar)稳定运行,0.5 s时负载Load2脱离系统,1 s后又重新接入系统.VSG控制参数D=50.66,mq=3.11e-4,为验证转动惯量J的取值对系统频率稳定的影响,分别取不同的转动惯量值进行仿真对比,仿真结果如图5所示.由图5可知,转动惯量J取值较小,在频率偏离额定值时VSG控制减缓频率突变的作用不明显;J取值较大,会造成频率恢复额定值的时间变长.因此转动惯量的取值不是单纯的越大越好或越小越好,不仅要考虑控制目的要求,还要考虑系统实际惯性容量的大小,选取一个合适的转动惯量值,对VSG控制有着重要意义.

图5 J对频率的影响
为了对两种控制方法进行对比,设定VSG控制的转动惯量J=1,下垂控制参数Dp=6.28e-5,Dq=3.11e-4,仿真结果如图6所示.由图6可知,VSG控制与下垂控制具有同样的静态特性,但由于其引入转子运动方程,为系统提供了惯性,使得暂态过程中的频率稳定性得到改善.
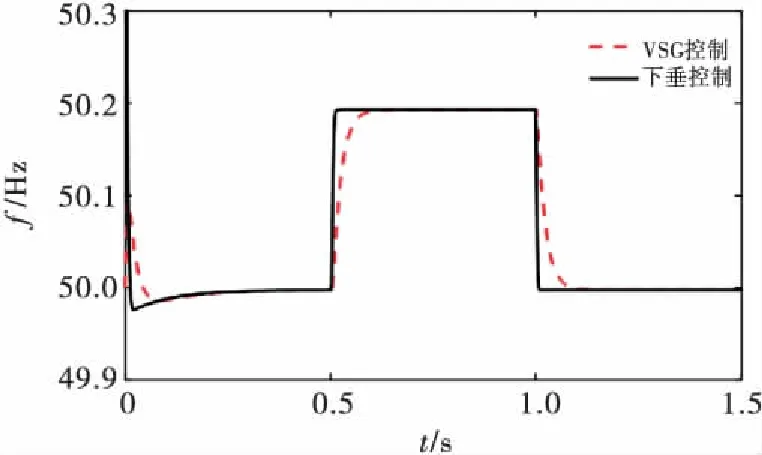
图6 两种控制方法对比
如果只改变阻尼系数D(对应下垂系数mp)或下垂系数mq,研究其对系统频率和电压的影响,仿真结果如图7所示.由图7可知,阻尼系数D主要影响频率的静态特性,对暂态过程的影响较小,而下垂系数mq主要影响电压幅值的稳态值,由此验证了VSG控制本质上属于下垂控制的理论分析.图8表示系统输出有功功率和无功功率变化图.

图7 D、mq对系统频率和电压的影响
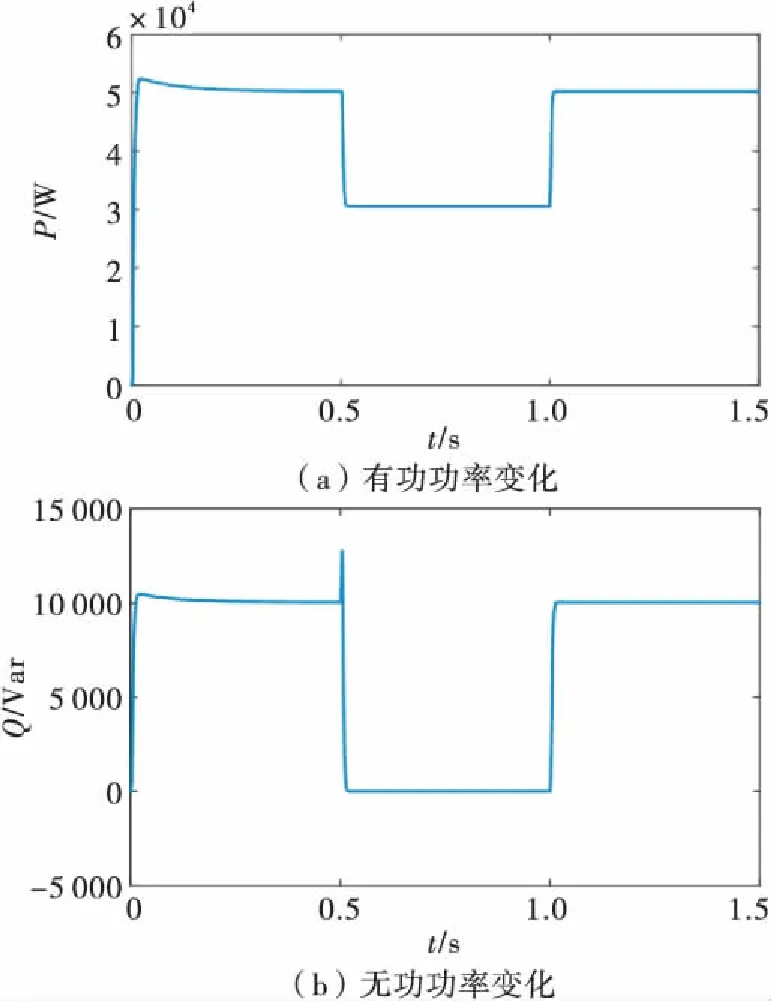
图8 系统输出有功功率和无功功率变化图
5 结 论
为实现分布式能源安全友好地接入电网系统,本文首先阐述了使用下垂控制实现分布式能源并网的不足,然后在下垂控制的基础上对现在应用较为广泛的虚拟同步发电机控制进行深入分析.
1)从本质上对下垂控制和VSG控制进行分析比较,从而得知VSG控制不仅与下垂控制具有同样的静态特性,且具有优于下垂控制的动态性能.
2)建立VSG控制的数学模型,基于下垂控制的参数设计原理,得出了VSG控制的参数设计方法.
3)利用Matlab/Simulink进行仿真实验,首先进行两种控制方法对比的仿真,仿真结果表明VSG控制较下垂控制更适用于分布式能源并网,其次关于阻尼系数和下垂系数对系统频率和电压的影响进行仿真,结果表明VSG控制具有下垂控制的本质,为今后将下垂控制的研究成果引入VSG控制中奠定了理论基础.
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
数学物理学报(2021年3期)2021-07-19 06:02:32
数学年刊A辑(中文版)(2021年2期)2021-07-17 08:38:02
数学物理学报(2021年2期)2021-06-09 08:54:38
高师理科学刊(2020年2期)2020-11-26 06:01:32
四川工商学院学术新视野(2020年2期)2020-08-13 03:18:34
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
小学科学(学生版)(2016年1期)2016-10-09 01:53:02
数学物理学报(2016年6期)2016-04-16 04:41:06