枪虾夹螯的结构特性、运动特性与射流聚焦机理研究
2019-11-20 03:59秦诗牧秦俊奇杨玉良韩浩亮狄长春
振动与冲击 2019年21期
秦诗牧,秦俊奇,杨玉良,时 岩,韩浩亮,狄长春
(1.陆军工程大学 石家庄校区 火炮工程系,石家庄 050003;2.南京理工大学 机械工程学院,南京 210000;3.63961部队,北京 100020)
枪虾是一种海洋虾类,身长约5 cm,拥有一对大小不等的夹螯,其大夹螯长度可达2.8 cm,约为身长的一半,见图1。大夹螯结构奇特,由动螯(dactylus)、柱塞(plunger)、囊腔(socket)和定螯(propus)几个部分组成。研究表明[1-5],除传递信息外,枪虾猎食时,通过闭合大夹螯,凝聚成一股高速射流,其速度可达到100 km/h,并在夹螯前侧形成一个空化气泡,气泡破裂产生的压力脉冲足以杀死猎物。
对于枪虾产生空化的机理,国外学者对其进行了研究。Hess等[6]根据枪虾夹螯结构,设计出简化的仿生实验装置,使用PIV技术,拍摄到了装置出口处涡旋的卷起过程,并推测枪虾的空化气泡产生与喷口涡旋有关。由于实验条件受限,实验装置无法对这一推测进行验证。Koukouvinis等[7]对该模型进行仿真模拟,根据仿真结果发现在喷口处形成的涡旋产生了涡空化,且这种涡空化在射流周围形成环状空泡。

图1 枪虾和夹螯结构[1]Fig.1 Shrimp and claw
根据空化产生原理可知,当流场中出现局部压力低于饱和蒸汽压力的区域时,该流动区域就会产生空泡,对于射流流场亦是如此[8]。定义空化数
(1)
式中,p∞和V∞是来流的压力和速度,pv是当地饱和蒸汽压。一般情况下,当空化数σ<1时就会出现空化初生,σ<0.5时会产生稳定的空化[9]。
空化是一个常见的物理现象,水中高速运动的物体均容易产生空化现象,其中以片状空化和云状空化居多。但经高速摄像拍摄观察,枪虾产生的空化气泡为单一空泡,并非云状空化,具有形态清晰、结构稳定的特点,见图2。据此推测出枪虾对产生的空化形态具有一定的控制能力。目前国内外对枪虾的研究主要为生物进化、空化噪声、材料研究等方面,枪虾夹螯产生聚焦射流的机理方面研究较少。研究枪虾夹螯结构与运动特性,对研究新型空化发生器,探索空化机理均具有重要意义。

图2 夹螯产生空化射流的高速摄影Fig.2 High-speed photography of cavitation jet
本文通过CT扫描技术和高速摄影技术分别研究枪虾夹螯结构特性与运动特性,揭示枪虾夹螯的运动规律,使用CFD模拟研究枪虾产生聚焦射流的过程和流场状态,分析枪虾夹螯结构对射流的聚焦作用机理。
1 材料与方法
1.1 显微CT扫描技术
计算断层扫描(CT)技术是目前应用最广的无损三维成像技术,其最大的优势就是可以在不引入人为缺陷的情况下原位地反映样品内部的空间结构。目前CT技术的成像原理是计算样品中每个微元的射线吸收系数(主要受密度的影响),然后以此作为不同组分区分的根据。
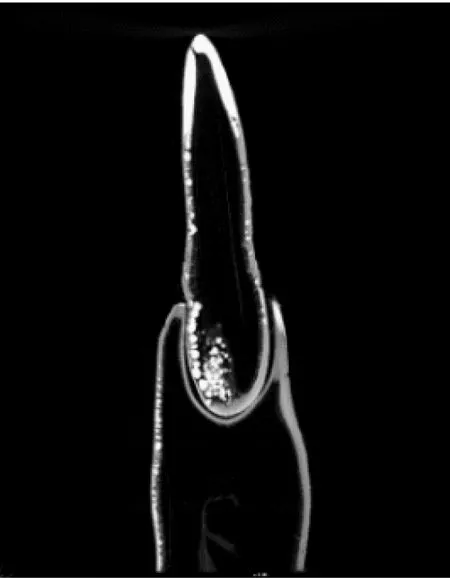
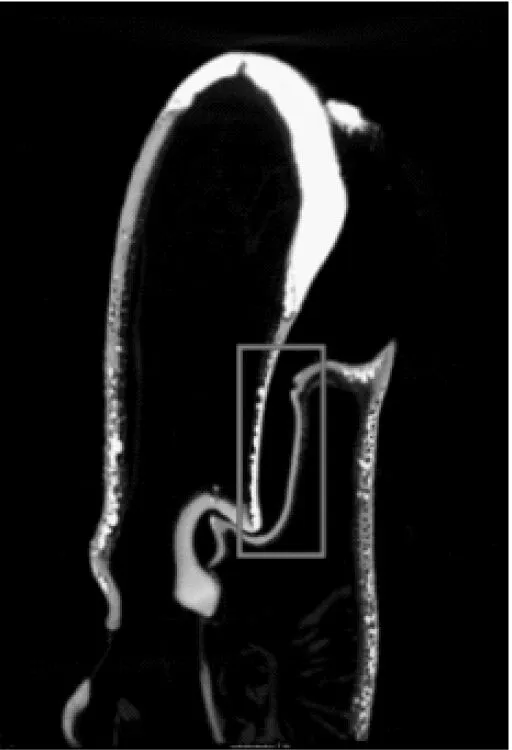
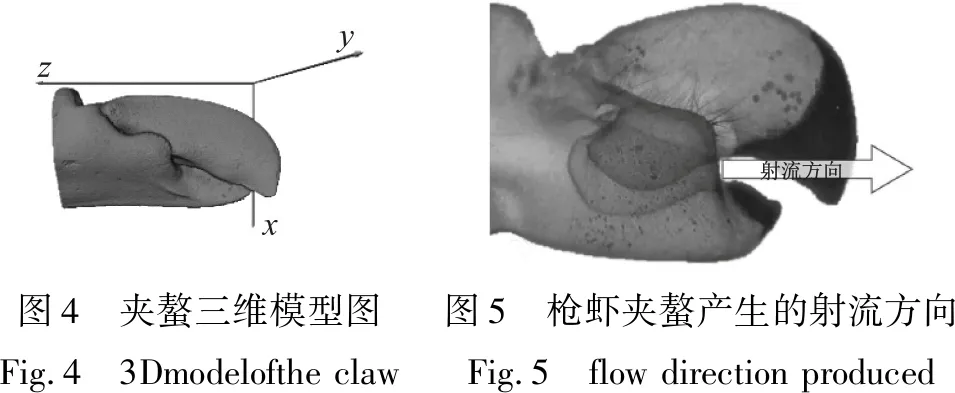
将枪虾夹螯调整到相应的张开角度后固定,制成生物样本,进行CT扫描(nanoVoxel-3000,天津三英精密仪器公司),得到夹螯x-y,x-z,y-z三个方向的切片图,如图3所示,其扫描的精度为6.52 μm,夹螯三维模型见图4。根据扫描切片图可以看到,在夹螯闭合状态下,动螯与定螯之间形成了一个腔体,如图3(b)线框中所示。枪虾夹螯在闭合过程中,动螯绕轴摆动,在夹螯完全闭合时刻,夹螯的角速度达到最高。动螯上的柱塞向前挤压囊腔中的液体,赋予液体向前的初始速度,加上囊腔后方和两侧的密封作用,使囊腔内的液体只能从开口位置射出,聚集成一股高速射流,类似于一个喷嘴结构的工作状态,如图5所示。
(a)y-z方向
(b)x-z方向

(c)x-y方向图3 夹螯CT扫描切片图Fig.3 The CT slices of shrimp claw
将扫描切片图经过三维重构,得到夹螯及囊腔的三维图像。对不同种类的枪虾夹螯进行比对发现,不同种类的枪虾夹螯的柱塞体积和囊腔容积大小不同,但其囊腔开口位置都存在一个沿开口轮廓分布的凹槽结构。使用Avizo三维构图软件对夹螯模型进行测量,实验所用三类枪虾(老虎枪虾(a)、(d)、红纹枪虾(b)、绿枪虾(c))的凹槽平均尺寸为深150 μm,宽150 μm,模型精度满足尺寸测量精度,误差小于5%,如图6所示。研究发现,该凹槽与射流聚焦有密切联系。
1.2 高速摄影捕捉夹螯运动特性
为开展基于高速摄影的夹螯的运动学研究,设计了如图7所示的实验装置。通过软固定的方式将枪虾固定在安装座内,调节枪虾的调节横梁与调节杆控制枪虾在水箱中的位置,位置固定后用调节螺母锁死。利用毛笔刺激枪虾夹螯使其动螯竖起,并触发高速相机捕捉夹螯运动信息。以侧拍高速相机为主视场,以俯拍高速相机为辅助视场,在与相机相对的面上设置坐标纸作为确定拍摄对象的位置、距离、角度以及图像后处理的参考依据,相机的拍摄频率与曝光时间见表1。
表1 高速相机设置
Tab.1 Settings of high speed camera

侧拍频率曝光时间俯拍频率曝光时间19200fps30μs6400fps30μs
根据侧拍像素点来标定坐标纸。经测量,坐标纸上4 mm的距离对应平均56个像素点,每个像素点对应的长度为0.071 43 mm,再由图像上的坐标值得到实际长度。
根据侧拍图片分析夹螯的闭合运动角度,进而得到夹螯的闭合角速度以及闭合角加速度。由于所使用相机帧频的限制,为了更好的拟合夹螯闭合角度与闭合时间的曲线,应该利用尽可能多的图片来获取枪虾夹螯的闭合角度。
利用MATLAB对侧拍图像进行处理,检测边缘拐点确定夹螯轮廓,如图8所示。获取拐点的图像像素坐标,拟合枪虾夹螯定螯和动螯的轮廓曲线,求解曲线夹角,得到夹螯闭合角度。通过高阶多项式拟合夹螯闭合角度与闭合时间的关系曲线,求导得到夹螯闭合角速度,再次求导,得到夹螯闭合角加速度。
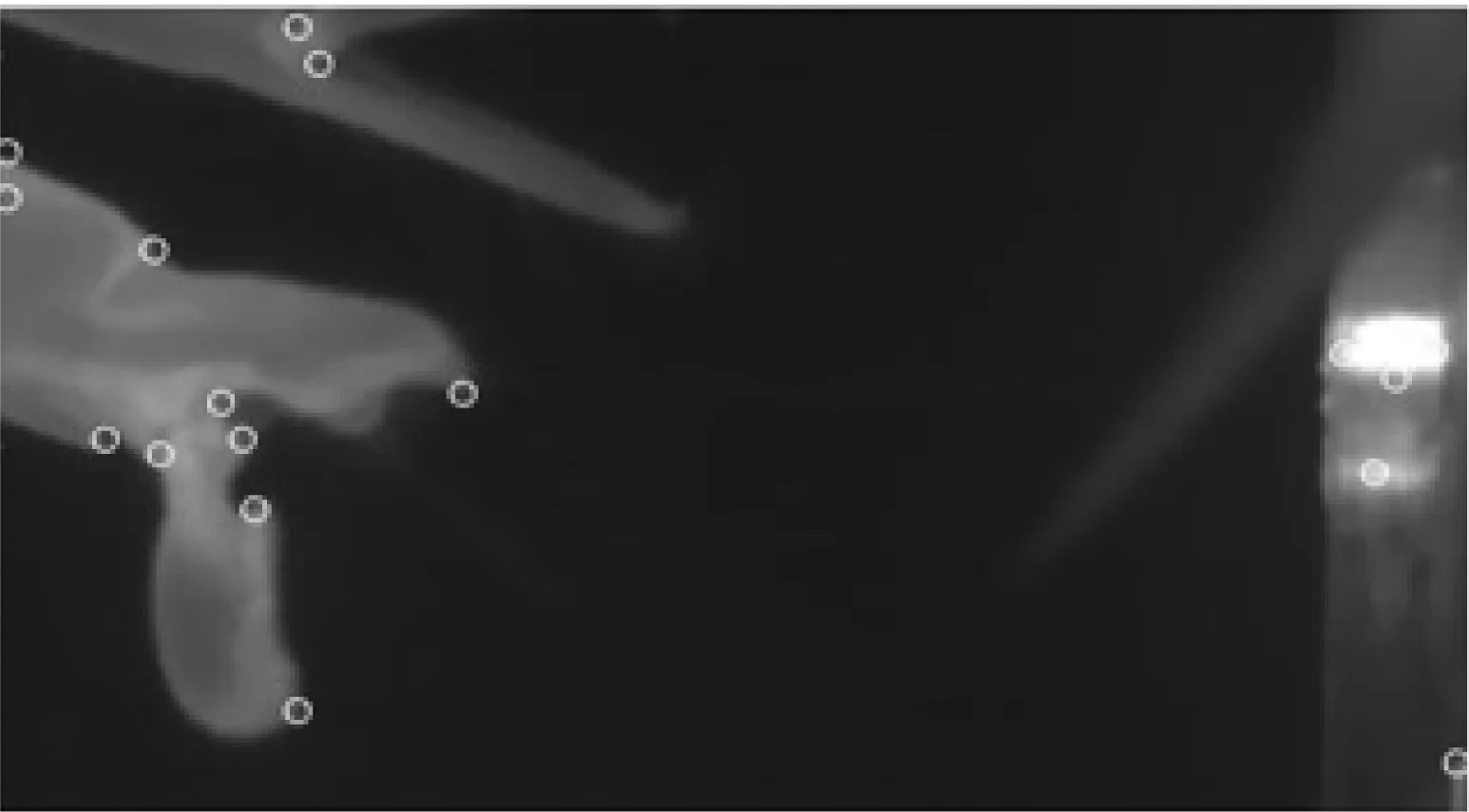
图8 夹螯运动图像处理Fig.8 Processing image of the claw motion
1.3 空化射流的CFD仿真
枪虾夹螯作为生物体结构,具有不规则性和微小性等特点,难以使用夹螯直接进行实验,其次生物存在个体差异,无法保证实验的可重复性,加之夹螯的闭合速度极高,在最后时刻可以达到4 000~5 000 rad/s,通过实验装置很难达到,因此研究枪虾夹螯的结构特性、运动特性成为一大难点。
通过计算机仿真可以方便地建立等效模型,并灵活调控结构参数,完成实验中无法完成的工作,更重要的是,仿真模拟可以获取流场中物理量的分布与变化情况,为研究枪虾空化射流的聚焦过程提供了极大的便利。
1.3.1 控制方程
枪虾通过挤压囊腔中的液体,在夹螯前侧形成高速射流,激发空化气泡产生,并迅速溃灭产生冲击波,整个过程涉及到气-液两相流。为捕捉气泡在水中的产生和运动的边界,采用多相流动的VOF模型进行计算,控制方程为[10]
连续性方程
(2)
式中,ρ为流体密度,v为射流速度。本文所研究的流体密度不发生变化,故方程可简化为

(3)
动量方程为

(4)
式中,u为微元体表面黏性应力,p为压力,g为重力加速度,F为体积力。
联立连续性方程和动量方程可得
(5)
引入体积分率函数αq,表示流体在网格中所占空间的比例,满足:
(6)
式中,下标q为流体中不同的相。
1.3.2 湍流模型
为研究夹螯凹槽结构对射流的影响,需要选择合适的湍流模型进行计算,确保仿真结果的准确性。
通常使用雷诺数Re判定流动类型
(7)
式中,v、ρ、μ分别为流体的流速、密度与黏性系数,d为凹槽结构特征长度。其中v=50~160 m/s,ρ=1 024 kg/m3,μ=0.001 003 kg/m·s,d=0.15 mm,得到Re=7 657.03~24 502.5,因此采用k-ε模型。Realizablek-ε模型相对标准k-ε模型,主要对湍流黏度μt计算式中的系数Cμ进行修正[11]
(8)
(9)
其中
(10)
在湍动黏度计算中引入了旋转和曲率的内容,使模型更适合于射流扩散、旋转流场、边界层流动等情况,满足枪虾夹螯模型仿真的条件,因此选择优化的Realizablek-ε模型。另外凹槽结构属于近壁面,该区域流动分子粘性影响大于湍流脉动影响,因此需要采用壁面函数方法配合Realizablek-ε模型进行计算。本文采用Standard wall function。
1.3.3 流域建立与参数设置
由于生物结构的复杂性,难以进行三维模型仿真计算,故根据夹螯x-z方向的切片图,建立夹螯平面模型,如图9所示,其中凹槽尺寸为0.15 mm×0.15 mm。由于夹螯闭合过程中流场区域随时间发生变化,需要使用动网格描述夹螯的运动及流场的变化,因此采用三角形网格进行全局划分,全局网格单元尺寸为0.1 mm。对动螯周围的网格进行加密,将凹槽内部的非结构网格转化为结构网格,并加密网格尺寸至凹槽尺寸的0.1倍、0.05倍,0.02倍和0.01倍,对应的全局网格数量分别为328 437、403 629、494 361和603 458,经过仿真模拟,得到的射流最高速度分别为120 m/s,143 m/s,166 m/s和165 m/s,当网格数量增大时,仿真射流的速度趋于稳定,即网格数量对计算精度的影响可以忽略,因此采用全局网格数量为494 361的网格进行计算,见图10。将网格导入Fluent软件并进行相关设置,如表2所示。
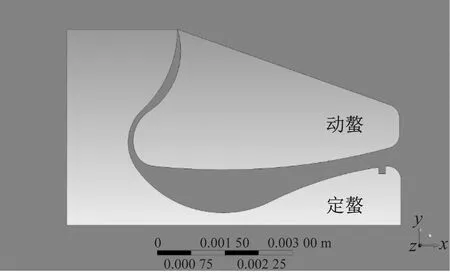
图9 夹螯结构平面模型Fig.9 The Plane model of the claw
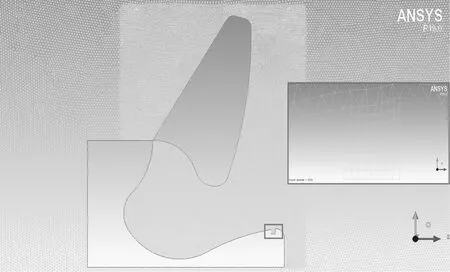
图10 计算域网格划分Fig.10 Computational domain meshing

表2 Fluent软件相关参数设置Tab.2 Parameters of Fluent simulation
将夹螯与囊腔前方的流场外围边界设置为压力出口(101 325 Pa),流场其他外围边界与囊腔设置为静态wall,夹螯设置为绕Z轴按一定角速度旋转的运动wall,壁面按无滑移边界处理。
1.3.4 动网格设置
动网格设置是仿真的关键,要充分考虑夹螯的闭合角度、闭合时间、瞬态闭合角速度。根据高速摄影拍摄结果,枪虾夹螯的闭合是一个加速运动过程,最大可达到3 000~5 000 rad/s。经测量,从夹螯开始运动到完全闭合的时间约为885 μs,最大闭合角速度为4 392 rad/s,将该运动信息写入profile,赋予动螯的运动参数,积分得出动螯运动角度为82.42°。
夹螯闭合过程中,流体区域将发生变形,尤其是夹螯与囊腔之间的流体区域,为模拟该流体变形,采用弹簧光顺模型与局部网格重构模型进行动网格的更新,其主要参数设置如表3所示。
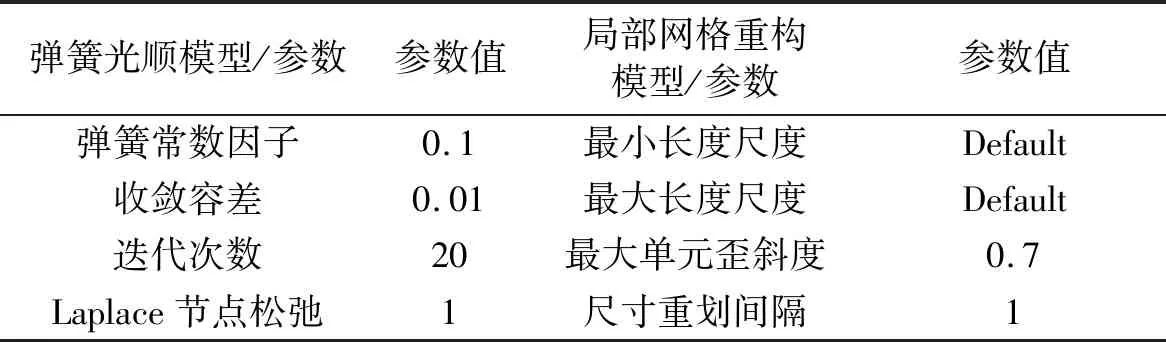
表3 动网格相关参数设置Tab.3 Setting of dynamic mesh
1.3.5 空化射流的数值模拟
通过高速摄像拍摄结果与模型的数值模拟对比,验证模型的可行性。枪虾闭合夹螯产生空化射流,并在夹螯前方形成空化气泡,图11为高速摄影拍摄的枪虾产生的空化气泡。通过CFD仿真模拟该过程,结果如图12所示,模型闭合后,在夹螯前方形成一个空化气泡,且气泡头部呈现锥形,与枪虾产生相似的空化射流效果。因此本文建立的平面夹螯模型能够较为准确地模拟枪虾产生空化射流的过程。

图11 高速摄影拍摄枪虾产生的空化气泡Fig.11 High speed photograph of cavitation bubble
2 结果与分析
2.1 夹螯的结构特性分析
根据夹螯扫描切片图3(a)可以看出,枪虾的夹螯与囊腔配合非常紧密,囊腔的形状随着夹螯的变化而变化,但夹螯与囊腔只在柱塞的根部发生接触,其他地方无接触,见图3(b),这与Amini等[12]的研究发现一致。这种结构可以最大程度避免枪虾夹螯快速闭合所产生的机械碰撞,减少夹螯的磨损。柱塞的表面稍向内凹陷,闭合状态下与囊腔形成一个小腔室,相对于没有小腔室的结构,这种结构可以让囊腔贮存更多的液体,见图3(c)。由于囊腔两侧与夹螯配合紧密,小腔室内的液体只能向开口方向流动,因此夹螯的运动形式和囊腔的构造限定了液体的流动方向。
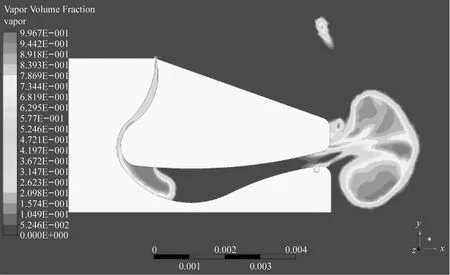
图12 空化气泡的仿真云图Fig.12 Simulation contour of the cavitation bubble
2.2 枪虾夹螯的运动特性分析
分析高速摄影结果,枪虾夹螯运动形式为绕轴加速运动,且加速度持续增大。可以看出当枪虾夹螯受到外界刺激信息时,枪虾夹螯张开,并在最大角度附近保持一段时间,与文献[2]中所述相似,这可能与枪虾动螯肌肉的充能有关。随后枪虾夹螯开始闭合,共17帧,时间约885 μs。通过计算,枪虾夹螯闭合时,初始闭合角速度较小,约70 rad/s,随后角速度持续增大,在闭合的最后阶段,角速度达到4 392 rad/s。同理,分析枪虾夹螯闭合角加速度,初始闭合角加速度约337 594.743 7 rad/s2,随后角加速度不断增大,在闭合的最后阶段,角加速度达到9 874 968.048 rad/s2,夹螯运动特性随时间变化关系如图13所示。
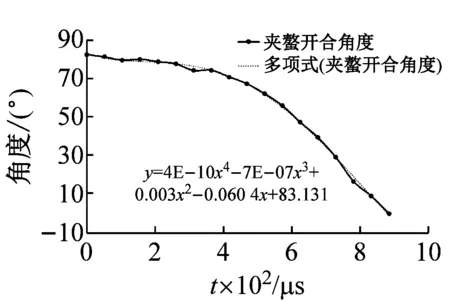
(a)夹螯开合角度与闭合时间曲线

(b)夹螯闭合角速度与闭合时间曲线

(c)夹螯闭合角加速度与闭合时间曲线图13 夹螯运动特性随时间变化关系Fig.13 Motion information of the claw
2.3 夹螯结构的聚焦机理分析
2.3.1 凹槽结构对射流速度的影响
喷嘴是夹螯完全闭合时,动螯与定螯之间形成的开口结构,流体通过喷嘴时反映射流流速情况。受液体黏性的影响,流体的速度从射流中心向近壁面逐渐衰减,取夹螯闭合时动螯与定螯前端连线的中点为监控点,监测射流通过喷嘴时的速度。速度-时间分布曲线如图14所示。根据曲线可以看出,随着夹螯闭合,囊腔开口处的速度逐渐变大,在柱塞结构进入囊腔(约700 μs)之前速度上升缓慢,随着柱塞加速挤压腔体内的水,囊腔开口速度骤增,在夹螯完全闭合时刻(约886 μs)速度达到峰值,随后迅速降低。其中,有凹槽时最大射流速度为166 m/s,无凹槽时最大射流速度为183 m/s,可见凹槽结构会使射流速度峰值降低。
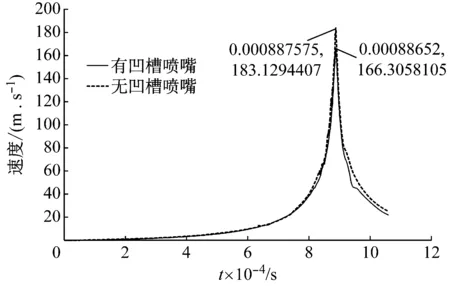
图14 喷嘴位置的射流速度Fig.14 Flow velocity of the nozzle with groove
2.3.2 凹槽结构对射流扩散角的影响
随着夹螯闭合,射流会沿喷口方向向前高速运动,根据淹没射流理论,由于受到环境液体的摩擦,高速射流边界会不断扩大,并呈发散状,如图15所示。枪虾夹螯喷口的速度分布云图也反映出这些特征,见图16。由图16可知,可以看出射流离开喷口以后,边界层不断扩大,扩散角也逐渐增大。

图15 射流结构分布图Fig.15 The structure of jet flow

图16 喷口位置速度云图Fig.16 Contour of nozzle velocity
取射流核心区速度的25%作为射流边界,以喷嘴轴线与射流边界形成的夹角为射流扩散角。其中凹槽结构的上下扩散角分别为β、α,无凹槽结构的上下扩散角分别为γ、θ,如图17所示。对比两种结构,在同一时刻,射流发生不同程度的扩散,有凹槽结构产生的射流扩散角明显小于无凹槽结构产生的射流扩散角。其中上扩散角β=γ,下扩散角α<θ,因此凹槽结构使射流的下扩散角减小。

(a)有凹槽的喷嘴结构
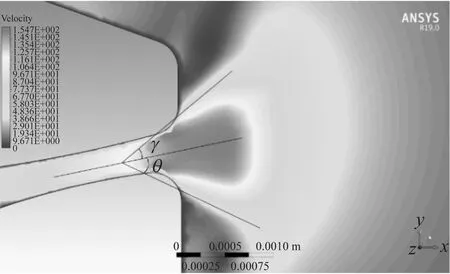
(b)无凹槽的喷嘴结构图17 喷口射流扩散角Fig.17 Diffusion angle of nozzle jet flow
2.3.3 囊腔凹槽结构对射流聚焦的作用机理分析
由于液体粘性力的作用,淹没射流与周围流场有较大的速度差异,在射流的剪切层处存在较高的速度梯度。剪切层中具有较大的剪切力,存在强烈的动量和能量交换。这种特性可以看作是一种摩擦阻力,使射流的速度逐渐降低。因此,淹没射流的聚焦实质上是控制射流剪切层的厚度。
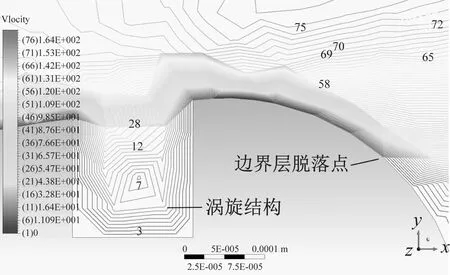
图18 凹槽结构的速度分布Fig.18 Contour of groove velocity

图19 速度卷曲与含气率分布Fig.19 Contour of velocity curl and vapor volume fraction
2.3.4 囊腔凹槽尺寸对射流聚焦的影响
为研究囊腔凹槽对射流聚焦的影响规律,对不同尺寸的凹槽进行数值模拟,取凹槽深宽比为1∶1,尺寸分别为0.05 mm、0.10 mm、0.15 mm、0.20 mm和0.25 mm。得到不同凹槽对应的射流的最大速度、扩散角以及边界层脱落点距凹槽下游顶点的距离,结果如图20所示。
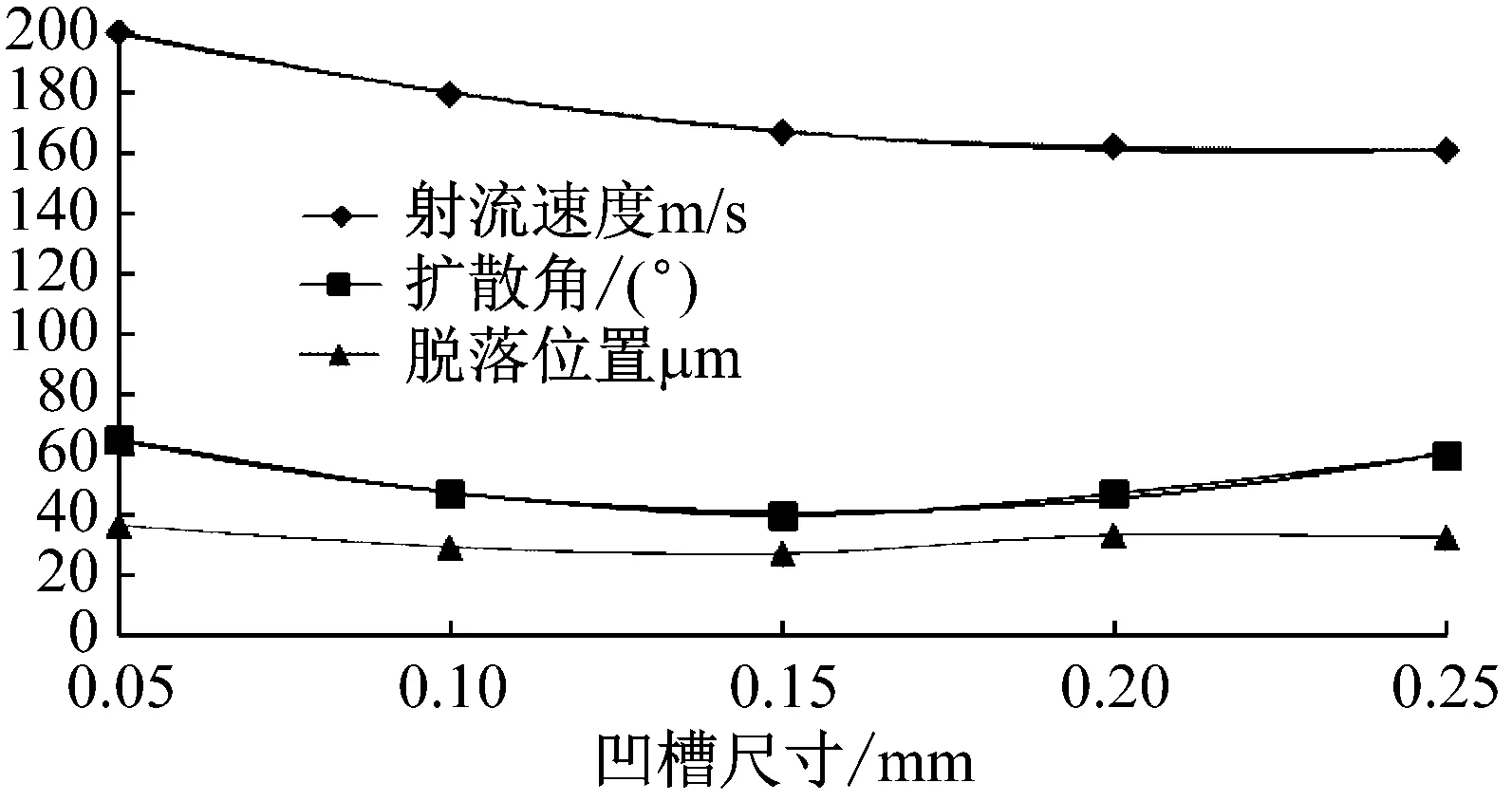
图20 凹槽尺寸对射流聚焦的影响Fig.20 The groove size influence on jet flow
由图20可以看出,随着凹槽尺寸的变大,喷口的射流速度逐渐减小,这是由于凹槽尺寸影响凹槽中涡旋的大小和强度,导致射流的能量损失,从而影响射流的速度。射流扩散角度随着凹槽的尺寸变化发生变化,凹槽尺寸开始增大时,射流的扩散角减小,边界层脱落位置逐渐靠近凹槽结构,当凹槽尺寸为0.15 mm时,射流的扩散角达到最小,约为40°,脱落点距离凹槽最近,为27.1 μm。而后随着凹槽尺寸的增大,射流扩散角逐渐变大,脱落点也逐渐远离凹槽。
将不同尺寸的凹槽结构对射流扩散角的影响关系进行二次拟合,得到y=ax2+bx+c的形式,即扩散角
θ=2 182.9x2-675.66x+93.2
(11)
3 结 论
(1)枪虾夹螯闭合状态下,柱塞与囊腔结构配合紧密,但只有柱塞底部与囊腔根部有直接接触,这种结构可以最大程度避免枪虾夹螯快速闭合所产生的机械碰撞,减少夹螯的磨损。
(2)夹螯闭合过程是一个角速度和角加速度持续增大的过程,初始闭合角速度较小,约70 rad/s,角加速度约337 594.743 7 rad/s2;在闭合的最后阶段,角速度达到4 392 rad/s,角加速度达到9 874 968.048 rad/s2。枪虾先将夹螯张开到最大角度并保持一段时间用于积蓄能量,然后迅速闭合夹螯,将囊腔中的液体向前挤压,形成射流。
(3)枪虾夹螯具有聚焦射流的作用,与囊腔开口处的凹槽结构有密切关系。高速射流通过凹槽时,会在凹槽内形成涡旋结构,发生动量交换,从而降低壁面射流的速度,减小边界层动能,促使边界层在喷口位置提前发生脱落,形成涡旋结构。由涡旋结构形成的涡空化包裹住射流,降低射流边界层的动量交换,减少射流的扩散角度,提高射流的聚焦性。
(4)凹槽结构的尺寸会对射流的速度和聚焦性产生影响。随着凹槽尺寸的增大,射流的速度逐渐减小,聚焦性在凹槽尺寸为0.15mm时达到最佳,与枪虾夹螯中凹槽结构尺寸相符,证明枪虾夹螯具有较强的聚焦射流能力。
猜你喜欢
流体机械(2022年8期)2022-10-13
大电机技术(2022年4期)2022-08-30
火箭推进(2022年2期)2022-05-14
流体机械(2021年1期)2021-02-23
小学教学研究·新小读者(2017年7期)2017-07-29
中学生数理化·高一版(2017年3期)2017-07-08
中国铸造装备与技术(2017年3期)2017-06-21
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
学苑创造·A版(2014年1期)2014-04-09