基于区间二型模糊终端滑模控制的飞行器姿态控制*
2019-11-14 00:58马飞越韩吉霞佃松宜
空间控制技术与应用 2019年5期
马飞越,韩吉霞,牛 勃,佃松宜
0 引 言
四旋翼无人机具有垂直起降、操作灵活、控制方便、机动性高等优点[1-4],因此被广泛应用在农业种植、林业资源调查、海洋巡检及城市航拍等诸多方面[5-8].四旋翼无人机系统为非线性动力学系统,本质是多变量的欠驱动系统[9],其飞行控制系统是保障稳定飞行的核心,因此控制问题成为主要的技术难点.
近年来,许多学者提出不同的方法对四旋翼无人机进行控制.文献[10]提出传统PID的方法对无人机系统进行控制,设计结构简单,不依赖对象模型且参数整定有规律,但是系统的反映速度较慢且动态性能较差;传统模型预测的方法需要被控对象提供精确的数学模型[11],但是抗干扰能力较差,当系统存在未知扰动时,效果较差;滑模控制对系统输入响应迅速[12],且具有较好的鲁棒性,但存在抖振,不利于控制器的控制.
本文提出将区间二型模糊控制与非奇异终端滑模控制结合的方法.利用滑模的快速响应特性,令系统在有限时间快速收敛至平衡状态并抵抗干扰,通过设计区间二型模糊控制,增强对干扰的适应能力并再次提高系统的收敛速度且削弱抖振,使四旋翼系统拥有更加优良的飞行性能.
1 四旋翼动力学建模
1.1 坐标系定义
建立地面坐标系E(OeXeYeZe)和机体坐标系B(ObXbYbZb),如图1.
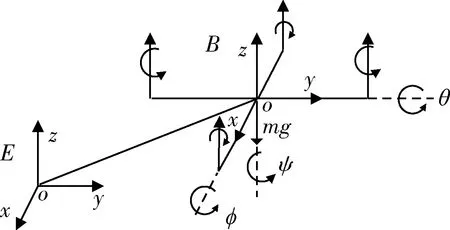
图1 地面坐标系与机体坐标系Fig.1 The ground coordinate system and the body coordinate system
定义地面坐标系原点为四旋翼起点,OeXe轴指向四旋翼飞行方向,OeZe轴垂直水平面向上,OeYe轴垂直OeXeZe平面且与其他两个坐标轴满足右手螺旋定则,OeXeYe平面为水平面.
定义机体坐标系的原点为四旋翼的质心,ObXb轴指向机体平面的正前方,ObZb轴垂直机体平面竖直向上,ObYb轴垂直ObXbZb平面且与其他两个坐标轴满足右手螺旋定则.
1.2 建立动力学模型
本文所设计的四旋翼飞行器在室内理想环境下进行姿态运动,飞行速度较小.建立其动力学数学模型时,可进行合理简化,假设:
1) 四旋翼飞行仿真器为刚体模型,结构均匀对称;
2) 当飞行器处于悬停状态,具有较小摄动时,其欧拉角(θ,φ,ψ)约等于转动角速度在机体坐标系中的投影(ωx,ωy,ωz);
3) 忽略空气阻力且不考虑旋翼的转动惯量;
4) 旋翼产生的升力与电机转速成正比;电机转速与电机电压成正比.
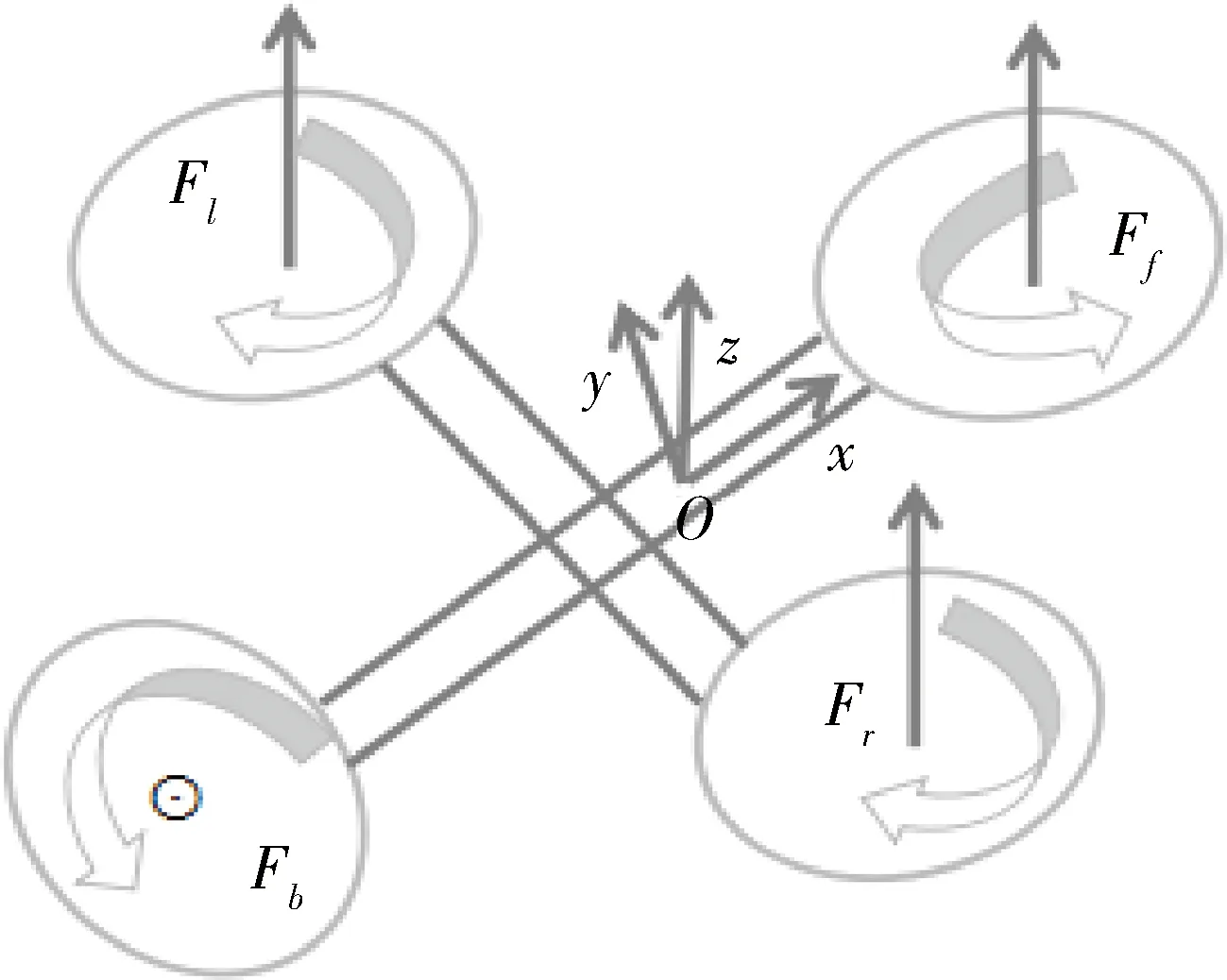
图2 四旋翼飞行器实验平台坐标系与受力分析Fig.2 Coordinate system and force analysis for experimental platform of four-rotor aircraft
四旋翼飞行器在某一时刻的姿态转动,可假设为其沿着该时刻角速度方向的瞬时转轴转动.转动方向随时间变化时刻改变,根据假设(1),将四旋翼的姿态运动简化为刚体绕质心的定点运动.
四旋翼的机体坐标系沿机身惯性主轴,则取其惯性矩阵I为:

(1)
其中,Ix,Iy,Iz是四旋翼绕机体坐标系主轴的三个转动惯量.
飞行器对其质心角动量P表示为:
P=Pxi+Pyj+Pzk
(2)
其中,i,j,k为跟随刚体旋转的单位向量.
i,j,k与机体坐标系下转动角速度ω的关系如下:

(3)
根据角动量定理,求得四旋翼系统综合力矩M为:
(4)
将式(3)代入到(4)中,得到:

(5)
将ω×P分解:
ω×P=(ωyPz-ωzPy)i+(ωzPx-ωxPz)j+
(ωxPy-ωyPx)k
(6)
将式(6)代入(5)中,得到角动量在机体坐标系的投影为:
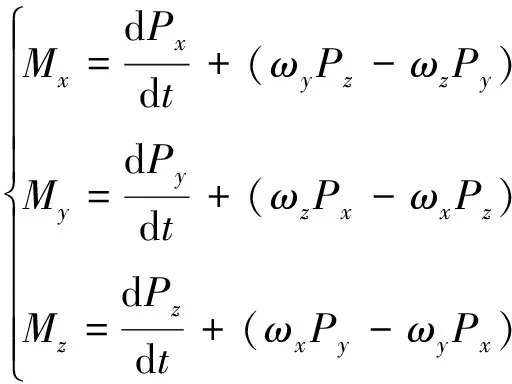
(7)
将(1)代入到(7)中,得到,
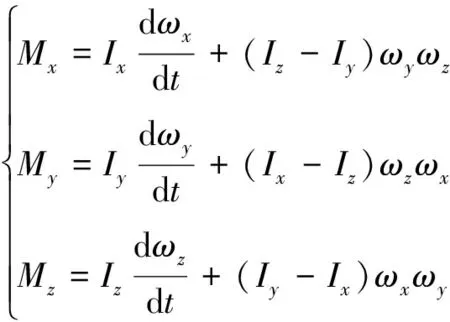
(8)
根据刚体绕定轴转动规律,建立俯仰角通道、滚动角通道及偏航角通道力矩平衡方程:
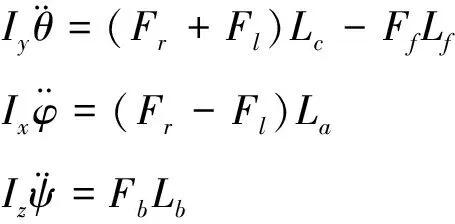
(9)
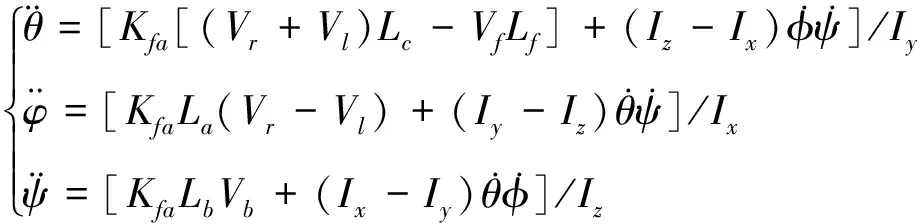
其中,Fr,Fl,Ff,Fb分别是四旋翼左侧、右侧以及前向、后向螺旋桨产生的升力.综合式(9),将式(8)变为:

(10)
其中,Vr,Vl,Vf,Vb分别是四旋翼左侧、右侧以及前向、后向电机电压值,La,Lb,Lc分别为左右旋翼中心到Ox轴、Oy轴和Oz轴的力臂长,Kfa为旋翼电机电压与旋转升力相关系数.
根据假设式(2),则式(10)可整理为:

(11)
所以,四旋翼动力学模型可表示为:
(12)
1.3 状态方程

X=[x1x2x3x4x5x6]T
(13)
其中:

(14)

(15)

(16)
由式(11)可知,四旋翼俯仰角通道与滚动角通道存在耦合,而四旋翼前向电机与左右电机存在如下耦合关系[13]:
Vr+Vl=Vf
(17)
根据俯仰通道、滚动通道和偏航通道选择如下控制输入:
U=[u1u2u3]T
(18)
其中:

(19)
结合式(11),(12)和(18)得到四旋翼系统的状态方程为:
(20)
2 非奇异终端滑模面设计
设俯仰角通道、滚动角通道以及偏航角通道的的理想输入信号分别为x1d,x3d,x5d,跟踪信号分别为x1,x3,x5.则可定义俯仰角、滚动角及偏航角跟踪误差为:
(21)
俯仰角速度、滚动角速度及偏航角速度跟踪误差:
(22)
其中,e1,e3,e5为俯仰角、滚动角及偏航角跟踪误差.e2,e4,e6为俯仰角速度、滚动角速度及偏航角速度跟踪误差.
为使俯仰角、滚动角及偏航角跟踪误差有限时间收敛,提高系统的跟踪速度,设计如下非奇异终端滑模面:
(23)
其中,λ=p/q,p,q均为正奇数,满足1
对滑模面求导,得到:

(24)
设计指数趋近律:
(25)

根据式(24)和(25),可得控制律为:

(26)
3 区间二型模糊调节滑模趋近律
模糊控制是一种不依赖被控对象精确模型的无模型控制器,它对不确定性具有良好的处理能力.与一型模糊控制相比,二型模糊具有更好的对不确定性的处理能力.下面先介绍一些二型模糊控制的基本概念.
3.1 区间二型模糊控制器
通常,区间二型模糊控制器由五部分组成,即:模糊器、模糊推理机、规则库、降型器和解模糊器.如图3所示.
1) 模糊器:模糊器是区间二型模糊控制的前件,通过隶属函数将精确输入转成模糊输入.通常选择三角形函数、高斯型函数等作为上隶属函数(UMF)、下隶属函数(LMF).
2) 模糊规则:区间二型模糊的模糊规则可表示为:


3) 模糊推理机:对于输入si和前件,点火区间Fn,表示为:
(27)
(28)

(29)
4) 降型器:本文选择集的中心法降型,表述为:

(30)

(31)
Ycos=[kl,kr]
(32)

5) 解模糊:通过解模糊,我们可得到最终输出,中心解模糊表示为:

(33)
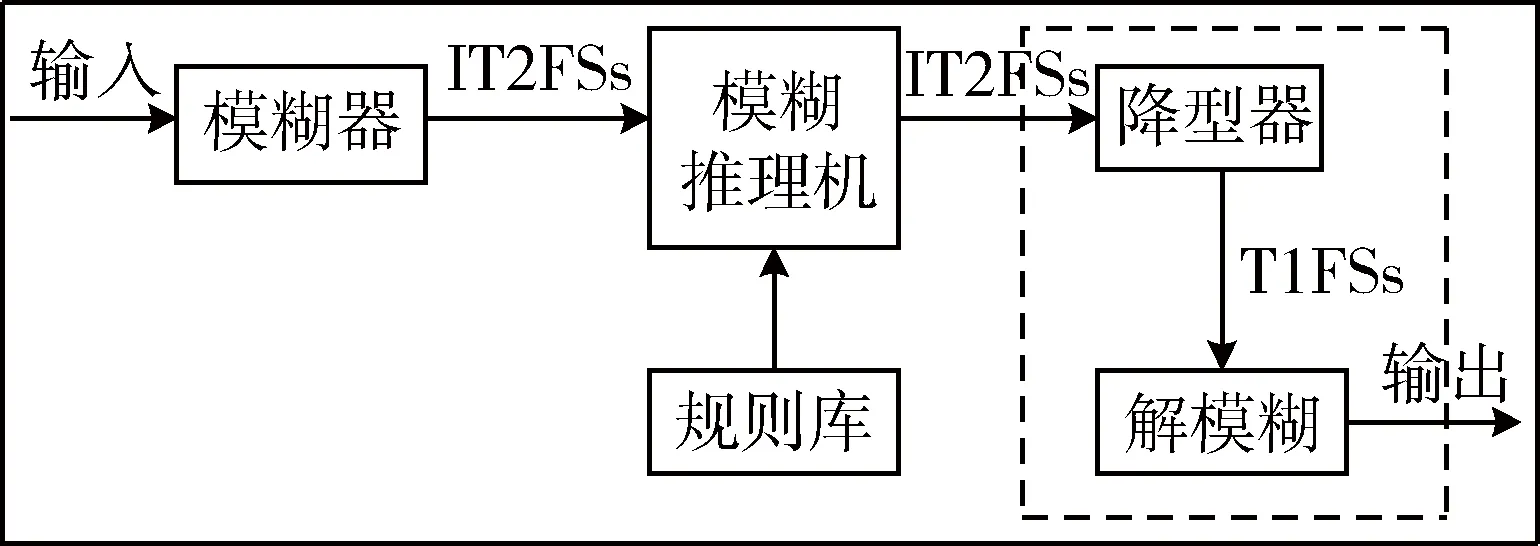
图3 区间二型模糊逻辑结构框图Fig.3 Structure diagram of interval type-2 fuzzy logic
3.2 IT2FLC调节趋近律
基于IT2FLC和NTSMC的四旋翼俯仰角、滚动角及偏航角角度跟踪框图如图4所示.

图4 基于IT2FLC和NTSMC的四旋翼俯仰角、滚动角及偏航角角度跟踪框图Fig.4 Tracking block diagrams of pitch angle, rolling angle and yaw angle of Four-rotor based on IT2FLC and NTSMC control methods
滑模控制因其变结构特性,具有很强鲁棒性,但参数的选择对其有较大影响.本文采用IT2FLC的方法动态调节滑模趋近律参数,使滑模具有更好的适应能力和抗干扰能力,在有限时间内快速收敛至平衡状态.
本文设计了三个模糊控制器分别控制俯仰角速度、滚动角速度及偏航角速度跟踪误差参数.模糊控制器输入分别为s1、s2和s3.输出变量分别为k1、k2和k3.模糊域分为四个模糊集IT2FSs,记为正大(PB), 正中(PM), 正小(PS)及零(ZR).上隶属函数和下隶属函数选择高斯型函数.
根据控制经验,当|s|>1时,应增大s1,s2,s3趋近律增益,让四旋翼俯仰角、滚动角及偏航角从初始位置快速趋近滑模面;当0<|s|<1时,应减小趋近律增益的值,降低四旋翼各角度趋近速度,削弱系统自身抖振.
IT2FLC规则表如表1所示.
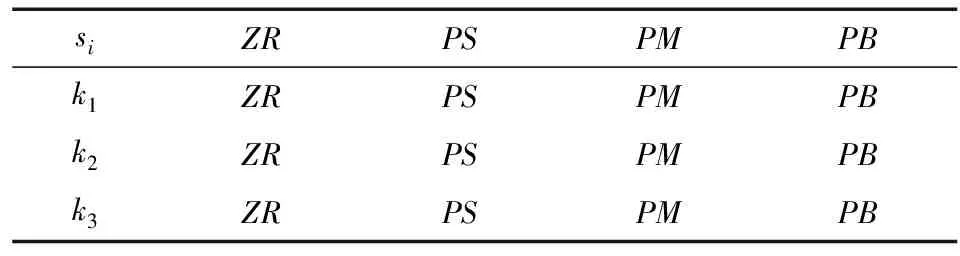
表1 模糊控制规则Tab.1 Fuzzy control rules
4 仿真证明
本节的控制对象如式(12),俯仰角、滚动角及偏航角控制律如式(26).取理想角度指令为:xid=sint,各角度的外部扰动为:d1=0.1×cost,位置初始值为:[0 0 0].为了更好显示本文方法(IT2FLC-NTSMC)的有效性,将本文方法与T1FLC(一型模糊控制)-NTSMC与NTSMC两种方法进行对比.仿真结果显示如图.
图5、6和7分别为外部扰动为d1=0.1×cost时的俯仰角、滚动角及偏航角角度跟踪情况.由图所示,本文采用的IT2FLC-NTSMC方法对理想角度具有最快最好的跟踪效果.
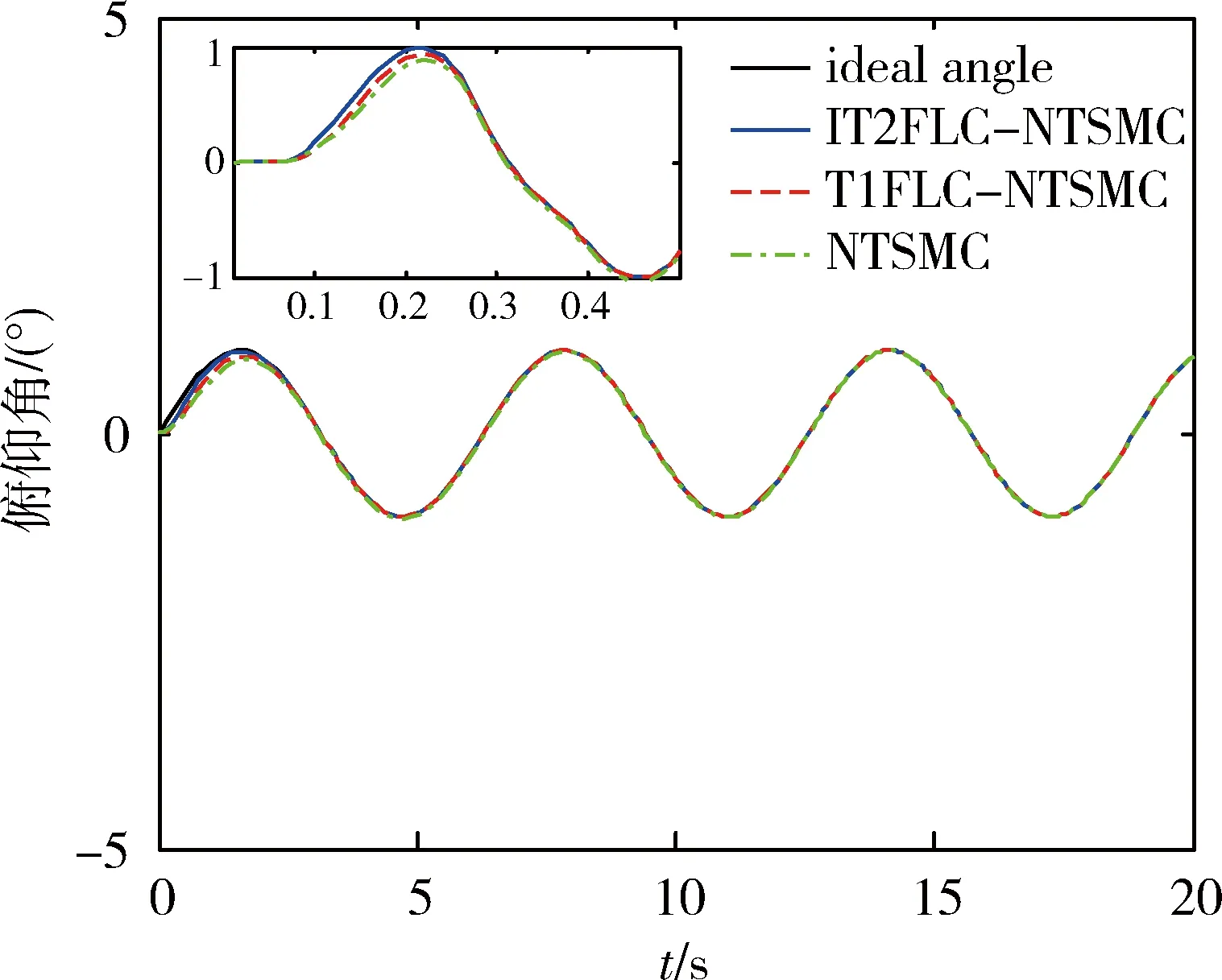
图5 外部扰动为d1=0.1×cost的俯仰角角度跟踪Fig.5 Pitch angle tracking with external disturbance of d1=0.1×cost
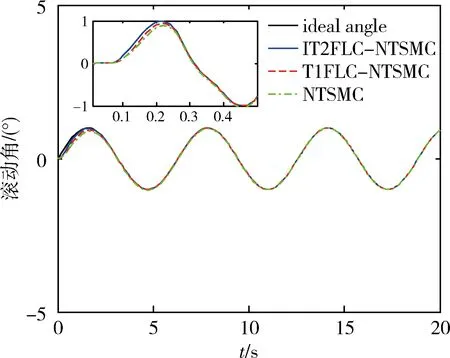
图6 外部扰动为d2=0.1×cost的滚动角角度跟踪Fig.6 Roll angle tracking with external disturbance of d2=0.1×cost

图7 外部扰动为d3=0.1×cost的偏航角角度跟踪Fig.7 Yaw angle tracking with external disturbance of d3=0.1×cost
图8、9和10分别为外部扰动为d1=0.1×cost时的俯仰角、滚动角及偏航角角度跟踪误差情况,如图跟踪效果显示的具有更加明显.本文提出的方法跟踪误差最小,且最快收敛至0.
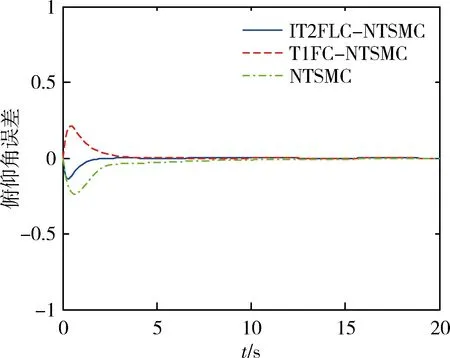
图8 外部扰动为d1=0.1×cost的俯仰角角度误差Fig.8 Pitch angle error with external disturbance of d1=0.1×cost

图9 外部扰动为d2=0.1×cost的滚动角角度误差Fig.9 Roll angle error with external disturbance of d2=0.1×cost
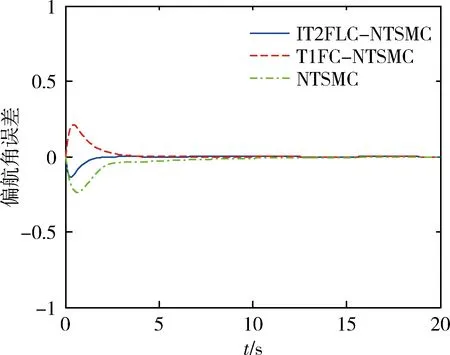
图10 外部扰动为d3=0.1×cost的偏航角角度误差Fig.10 Yaw angle error with external disturbance of d3=0.1×cost
图11、12和13分别为外部扰动为d1=0.1×cost时的俯仰角、滚动角及偏航角角度控制器.如图所示,本文提出的方法控制输入振荡最小,使四旋翼飞行器具有更加平稳的性能.
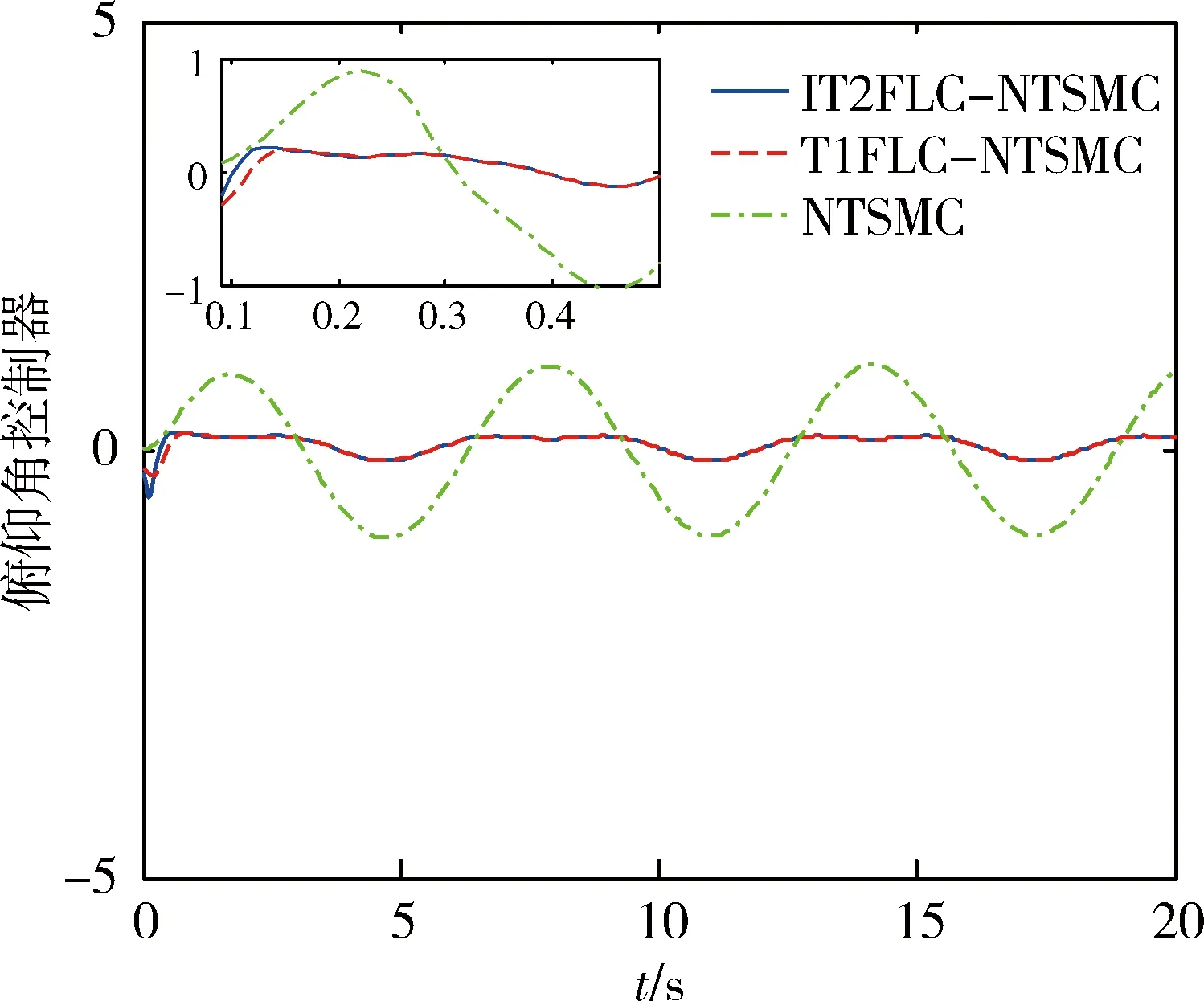
图11 外部扰动为d1=0.1×cost的俯仰角角度控制器Fig.11 Pitch angle controller with external disturbance of d1=0.1×cost
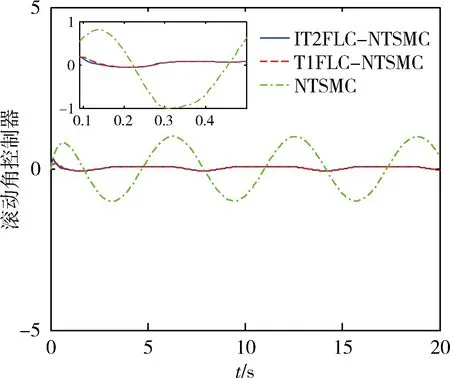
图12 外部扰动为d2=0.1×cost的滚动角角度控制器Fig.12 Pitch angle controller with external disturbance of d2=0.1×cost
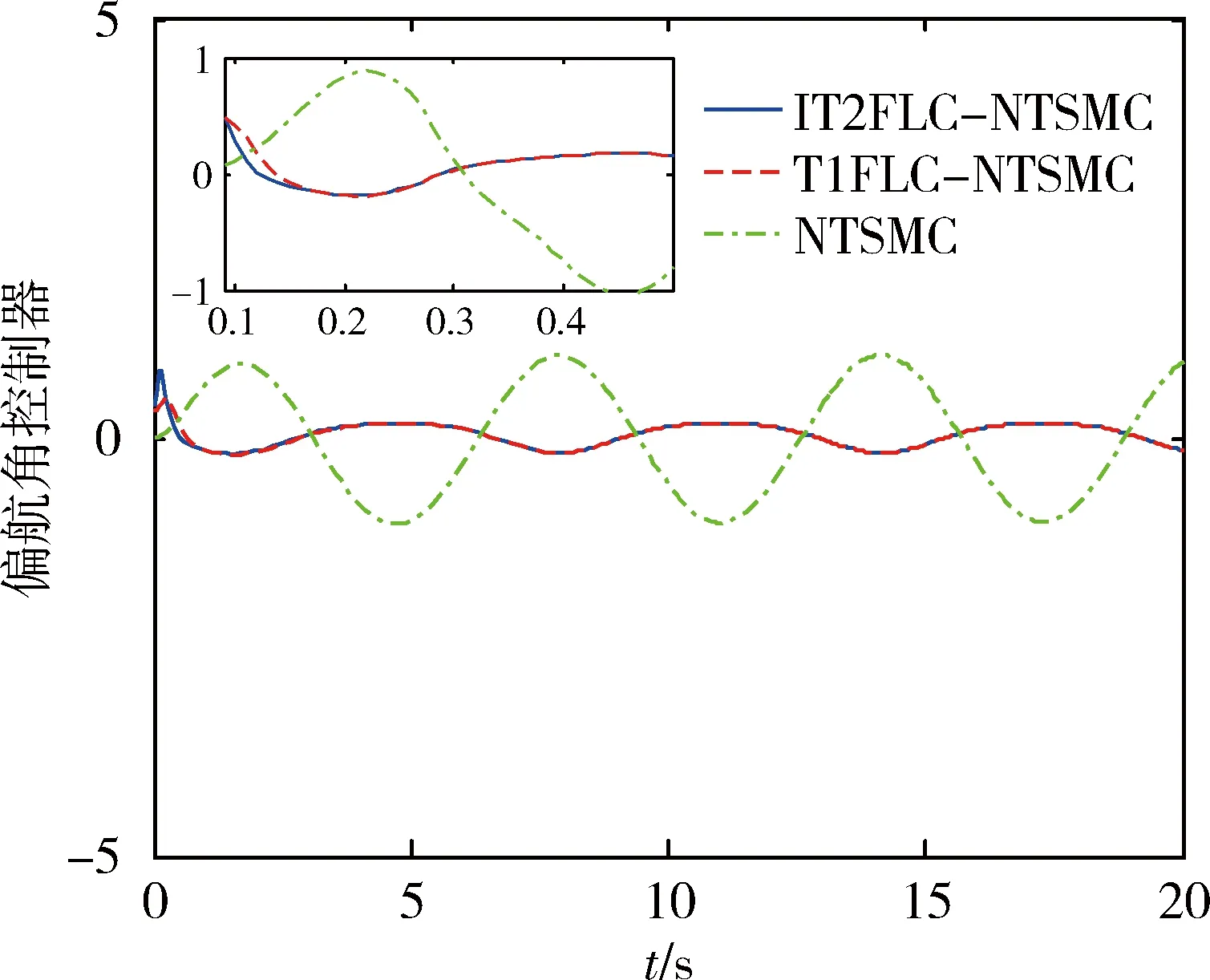
图13 外部扰动为d3=0.1×cost的偏航角角度控制器Fig.13 Yaw angle controller with external disturbance of d3=0.1×cost
5 结 论
本文提出了基于IT2FLC和NTSMC的四旋翼飞行器跟踪控制方法.俯仰角、滚动角及偏航角各设置一个控制器,均采用非奇异终端滑模控制的方法,利用滑模控制强鲁棒性,令系统在有限时间内快速收敛.采用IT2FLC控制器对各角度趋近律动态调节,加强对随机扰动的适应能力并削弱滑膜输入的抖振.最后,将本文提出的方法与T1FLC-NTSMC和NTSMC两种方法在四旋翼的跟踪效果上进行对比,仿真结果显示出本文所提出方法的有效性.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
汽车实用技术(2022年3期)2022-02-23
科学技术创新(2021年35期)2022-01-14
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
水下无人系统学报(2021年1期)2021-03-10
成都信息工程大学学报(2021年6期)2021-02-12
中学课程辅导·教师通讯(2018年10期)2018-09-04