
基于FxLMS的汽车车内噪声变步长主动均衡算法
2019-11-11 13:25:10张帅王岩松郭辉王孝兰刘宁宁
声学技术 2019年5期
张帅,王岩松,郭辉,王孝兰,刘宁宁
基于FxLMS的汽车车内噪声变步长主动均衡算法
张帅,王岩松,郭辉,王孝兰,刘宁宁
(上海工程技术大学汽车工程学院,上海 201620)
提出了一种可用于汽车车内噪声主动均衡控制的变步长主动噪声均衡(Active Noise Equalization, ANE)算法,与传统车内噪声主动抵消控制方法所采用的滤波x最小均方(Filtered-x Least Mean Square, FxLMS)算法相比具有更好的实用性。应用固定步长主动噪声均衡(Active Noise Equalization, ANE)算法、所提出变步长ANE算法和已有变步长ANE算法分别进行汽车车内噪声主动均衡控制。结果表明,所提出变步长ANE算法具有更快的收敛速度和较低的稳态误差,并且能进一步降低汽车车内噪声响度,为汽车车内声品质主动控制提供了一种新方法。
车内噪声;响度;变步长;滤波x最小均方算法;主动噪声均衡算法
0 引言
近年来,噪声主动控制方法已经成为汽车车内噪声控制研究的一个热点[1-3]。该方法主要是通过以声消声的方式,人为地附加若干个次级声源并发出与初级噪声反相的声波,从而降低初级噪声的噪声水平。
在车内噪声主动控制方法中,噪声主动控制策略和算法的研究是关键。主动控制策略主要包括两种:主动噪声抵消控制和主动噪声均衡控制。主动噪声抵消控制方法往往是以尽可能的抵消车内初级噪声幅值为目的[4],以车内噪声的声压级控制量为考核标准,在车内噪声主动控制方法早期的研究中应用广泛。如OLIVEIRA[5]和LI等[6]分别采用滤波x最小均方(Filtered-x Least Mean Square, FxLMS)算法对车内发动机噪声进行了抵消控制,并取得了较好的降噪效果。但主动噪声抵消控制方法未考虑到乘员的主观感受,车内初级噪声经过抵消控制后,残余噪声的波形变成细窄的条状,已失去了初级噪声的声波特征[7],此时乘员将无法根据车内声音来判断汽车行驶工况,不利于安全驾驶。而近来新兴的主动噪声均衡方法在降低车内初级噪声声压级的基础上保留一定的初级噪声幅值[8],使残余噪声依然保持着初级噪声的声波特征,具有更好的实用性。此方法往往以控制车内声品质或提高车内声环境听觉舒适性为目的,以车内声品质参数控制量为考核标准,这些参数包括响度、尖锐度、粗糙度、波动度等[9],其中响度对车内声品质的贡献量在60%以上而被重视[10],许多国内外研究人员也都致力于降低车内噪声响度的主动控制方法研究[11-12]。

本文在文献[14]所提出变步长函数基础上进一步改进,提出一种新的变步长函数,并基于FxLMS算法提出一种变步长ANE算法。采集了正常行驶状态下汽车的车内噪声信号,应用所提出的变步长ANE算法对其进行主动均衡控制,结果表明,所提出的变步长ANE算法具有优异的性能。
1 FxLMS算法

图1 FxLMS算法框图



2 ANE算法
ANE算法的框图如图2所示。

图2 ANE算法框图


假设FxLMS算法收敛后,初级噪声刚好被完全抵消,即:

则此时的残余噪声为

初级噪声得到一定量的保留。


3 变步长ANE算法
3.1 变步长函数

文献[14]提出的变步长函数为

对式(13)进行化简可得:


将式(15)应用到ANE算法中,最后式(11)对滤波器进行自适应更新时采用新的迭代公式:

3.2 参数分析
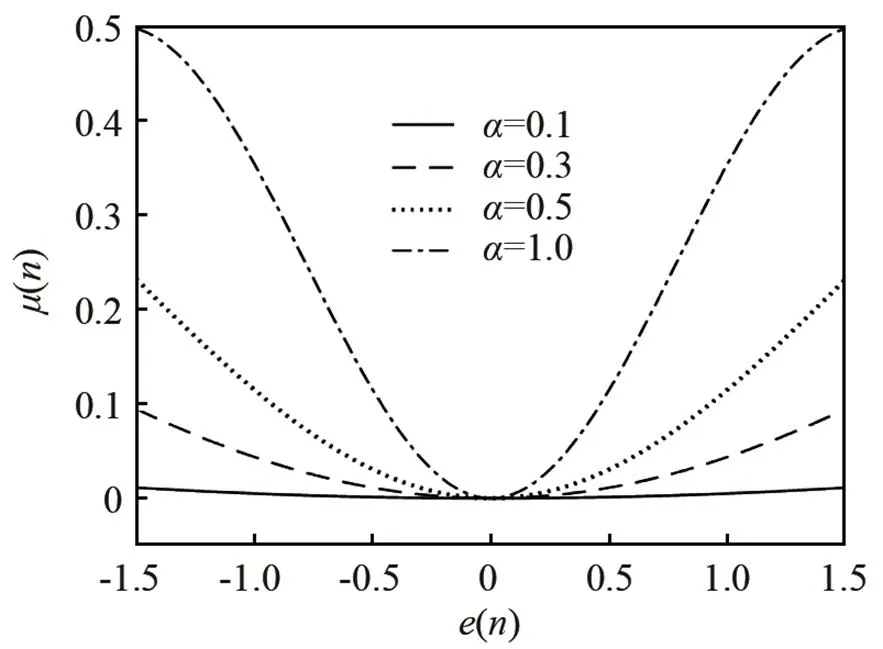
(a)=0.5,=2
(b)=1,=2
从以上的分析中可以看出,这3个参数值的大小对算法的收敛性能都有很大影响,这也初步验证了改进函数的合理性。但由于目前变步长函数的最佳取值仍无法通过理论计算给出,在实际应用中,可以根据实际状况参考以上的分析对参数进行调试,进而达到较好的收敛状态。
4 仿真实验
为进一步验证所提出算法的有效性,依据声学—汽车车内噪声测量方法(国家标准GB/T 18697_2002)[16],本节对汽车车内噪声信号进行了采集。选取车辆为国产某品牌家用轿车,数据采集时车窗处于关闭状态。采集设备为西门子公司生产的LMS.test.Lab噪声与振动信号采集设备。采集数据为汽车以匀速60 km.h-1直线行驶时驾驶员右耳处的噪声信号,此时的车内噪声包含有发动机以及传动机构噪声、路噪、风噪以及周围环境噪声等,是一种汽车正常行驶状态下的综合噪声,结果如图4所示,其中纵轴幅值进行了归一化。
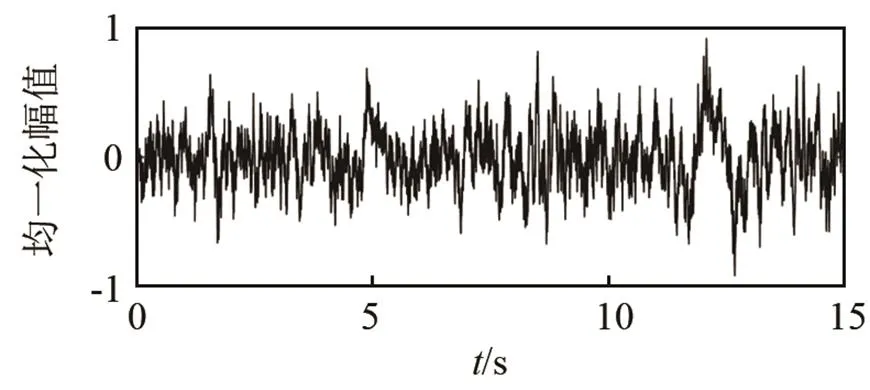
图4 车内噪声信号
将所提出的变步长函数分别应用到FxLMS算法和ANE算法上,并应用变步长FxLMS算法、变步长ANE算法和固定步长ANE算法对所采集车内噪声进行主动控制仿真实验。所用实验车的初级传递路径以及次级传递路径分别为[0.01-0.05-0.05 0.75 0.5 0.5-0.4 0.2-0.03-0.01]和[0.01 0.1 0.9-0.75-0.1]。
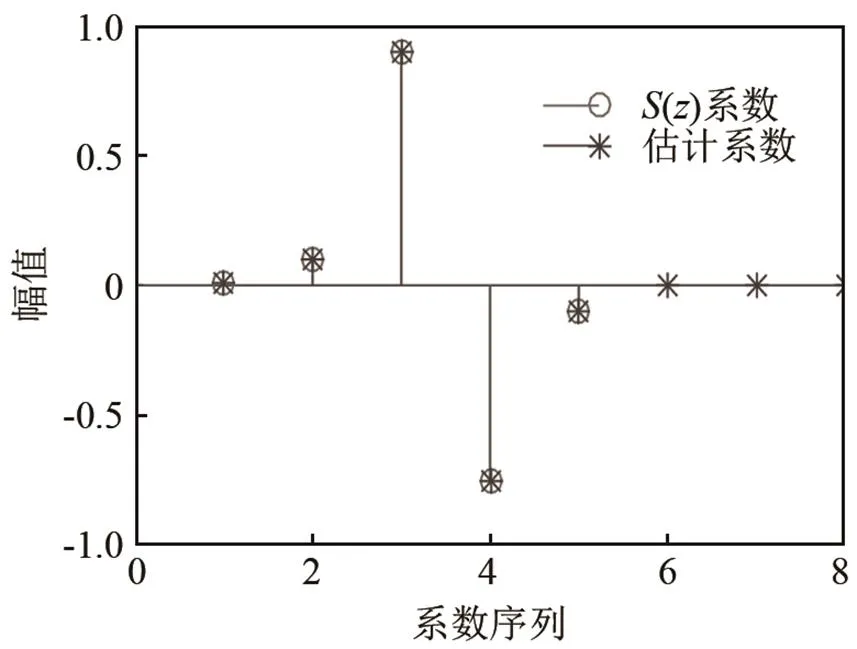
图5 次级路径的拟合
4.1 控制策略结果对比
对式(15)中参数进行调试,使变步长FxLMS算法以及变步长ANE算法达到最优的收敛状态,得出各个参数值为:=4,=0.3,=0.5。
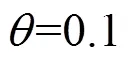
从图6中可以清晰地看出,车内噪声经过变步长FxLMS算法主动控制后,残余噪声波形成细窄的条状,已经失去初级噪声的声波特征。而经过变步长ANE算法主动控制后,其残余噪声依然保持着初级噪声的声波特征。经过噪声回放发现,变步长ANE算法的残余噪声依然保持着初级噪声的时变性,而变步长FxLMS算法的残余噪声却已失去了初级噪声的时变性,无法根据该残余噪声判断汽车的运行状态。
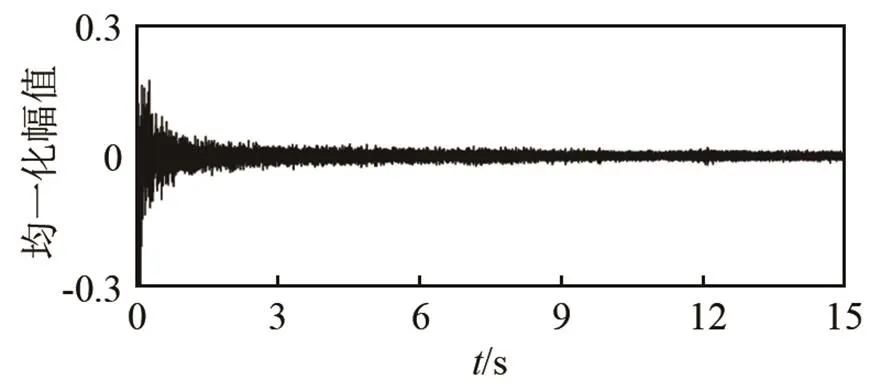
(a) 变步长FxLMS算法残余噪声
(b) 变步长ANE算法残余噪声
图6 变步长FxLMS和变步长ANE算法主动控制结果对比
Fig.6 Comparison of active control results between variable step-size FxLMS and variable step-size ANE algorithm
4.2 收敛性对比

采用固定步长ANE算法和变步长ANE算法得到的结果如图7、8所示。
图8 变步长ANE算法残余噪声[14]
结合图6(b)中本文所提出的变步长ANE算法主动噪声均衡控制结果,对三种主动噪声均衡算法收敛性进行对比,结果如图9所示,图9中横轴表示迭代次数,纵轴为均方误差MSE(Mean Square Error)。从3条曲线的下降速度可以看出,文献[14]所提出变步长算法的收敛速度明显快于固定步长算法,但稳态误差噪声与固定步长算法相当。而本文所提出的变步长算法的收敛速度相对于文献[14]所提出的变步长算法又进一步提高,且其稳态误差值也低于其他两个算法。

图9 不同算法的收敛性对比
依据国际标准Loudness ISO 532A分别计算采集车内噪声、固定步长ANE算法的残余噪声,依据文献[14]变步长ANE算法和本文所提出变步长ANE算法计算残余噪声响度,结果如表1所示。

表1 不同算法的噪声响度
从表1中各个噪声响度值可以看出,采样噪声经过固定步长ANE算法主动均衡控制后响度值下降了1.49 sone。采用依据文献[14]的变步长ANE算法的主动噪声均衡控制后噪声响度与固定步长算法相比几乎无变化。而经过本文所提出变步长ANE算法主动均衡控制后响度值下降了1.72 sone,与固定步长算法相比又下降了0.23 sone,取得了较好的效果。
5 结论
经过变步长FxLMS算法主动控制后,车内噪声已经失去初级噪声的声波特征,无法辨别初级噪声的时变性,而变步长ANE算法的残余噪声保留了一定的初级噪声幅值,依然可以辨别出初级噪声的时变性。这说明与主动噪声抵消方法相比,主动噪声均衡方法具有更好的实用性。仿真试验的对比结果表明,本文所提出的变步长ANE算法不仅提高了固定步长ANE算法的收敛速度,同时降低了稳态误差,且与已有变步长方法相比,具有更快的收敛速度和更小的稳态误差。同时本文所提出变步长ANE算法可进一步降低汽车的车内噪声响度,改善了车内声品质。
[1] HAFIDI A E, MARTIN B, LOREDO A, et al. Vibration reduction on city buses: determination of optimal position of engine mounts[J]. Mechanical Systems and Signal Processing, 2010, 24(7): 2198-2209.
[2] AIRAKSINEN T, TOIVANEN J. An optimal local active noise control method based on stochastic finite element models[J]. Journal of Sound and Vibration, 2013, 26(332): 6924-6933.
[3] 冯天培, 孙跃东, 王岩松, 等. 汽车车内制动噪声主动控制[J]. 噪声与振动控制, 2016, 36(1): 75-78.
FENG Tianpei, SUN Yuedong, WANG Yansong, et al. Active noise control of automotive interior braking noise[J]. Noise and Vibration Control, 2016, 36(1): 75-78.
[4] BELGACEM W, BERRY A, MASSON P. Active vibration control on a quarter-car for cancellation of road noise disturbance[J]. Journal of Sound and Vibration, 2012, 331(14): 3240-3254.
[5] de OLIVEIRA L P R, da SILVA M M, SAS P, et al. Concurrent mechatronic design approach for active control of cavity noise[J]. Journal of Sound and Vibration, 2008, 314(3-5): 507-525.
[6] LI D S, CHENG L. The design of synthesized structural acoustic sensors for active control of interior noise with experimental validation[J]. Journal of Sound and Vibration, 2010, 329(2): 123-139.
[7] 张帅, 王岩松, 张心光, 等. VS-MFxLMS算法及其在汽车车内噪声有源控制中的应用功能[J]. 噪声与振动控制, 2019, 39(2): 64-69.
ZHANG Shuai, WANG Yansong, ZHANG Xinguang, et al. Application of variable step-size modified FxLMS algorithm to active interior noise control for vehicles[J]. Noise and Vibration Control, 2019, 39(2): 64-69.
[8] JAIME A. Mosquera-Sánchez, WIM Desmet, et al. A multichannel amplitude and relative-phase controller for active sound quality control[J]. Mechanical Systems and Signal Processing, 2017, 88(1): 145-165.
[9] 贺岩松, 涂梨娥, 徐中明, 等. 汽车声品质研究综述[J]. 汽车工程学报, 2014, 4(6): 391-401.
HE Yansong, TU Li’e, XU Zhongming, et al. Review of vehicle sound quality[J].inese Journal of Automotive Engineering, 2014, 4(6): 391-401.
[10] 王登峰, 刘宗巍, 梁杰, 等. 车内噪声品质的主观评价试验与客观量化描述[J]. 吉林大学学报(工学版), 2006, 36(S2):41-45.
WANG Dengfeng, LIU Zongwei, LIANG Jie, et al. Subjective evaluation test and objective quantificational description of vehicle interior noise quality[J]. Journal of Jilin University (Engineering and Technology Edition), 2006, 36(S2):41-45.
[11] 姜顺明, 陈南. 采用响度控制改进算法的封闭车厢主动消声[J]. 振动与冲击, 2013, 32(5): 167-170.
JIANG Shunming, CHEN Nan. Active loudness control of enclosed cabin noise by using improved algorithm[J]. Journal of Vibration and Shock, 2013, 32(5): 167-170.
[12] WANG Y S, FENG T P, WANG X L, et al. An improved LMS algorithm for active sound-quality control of vehicle interior noise based on auditory masking effect[J]. Mechanical Systems and Signal Processing, 2018, 108:292-303.
[13] MARCOS V M, SEARA R. On the stochastic modeling of FxLMS-based narrowband active noise equalization systems[J]. Signal Processing, 2015, 115: 214-226.
[14] 余荣平, 张心光, 王岩松, 等. 车内噪声主动控制变步长LMS算法[J]. 噪声与振动控制, 2015, 35(1): 123-126.
YU Rongping, ZHANG Xinguang, WANG Yansong, et al. Active noise control for vehicle interior noise using variable incremental step LMS algorithm [J].Noise and Vibration Control, 2015, 35(1): 123-126.
[15] SUN G H, FENG T, LI M F, et al. Convergence analysis of FxLMS-based active noise control for repetitive impulses[J]. Applied Acoustics, 2015, 89: 178-187.
[16] 中华人民共和国国家质量监督检验检疫总局. GB/T 18697-2002 声学—汽车车内噪声测量方法[S]. 北京: 中国标准出版物社, 2002.
A FxLMS based variable step-size active equalization algorithm for vehicles interiornoise
ZHANG Shuai, WANG Yan-song, GUO Hui, WANG Xiao-lan, LIU Ning-ning
(Automotive Engineering College, Shanghai University of Engineering Science, Shanghai 201620, China)
A new active equalization method for vehicle interior noise based on variable step-size ANE algorithm is presented in this paper, which has better practicality compared with the traditional active interior noise cancellation control method based on Filtered-x Least Mean Square (FxLMS) algorithm. The fixed-step Active Noise Equalization (ANE) algorithm, the proposed variable step-size ANE algorithm and the existing variable step-size ANE algorithm have been respectively applied to active interior noise equalization control for comparison. The results show that the proposed variable step-size ANE algorithm has faster algorithm convergence speed, less steady-state error and gives a lower loudness level, which provides a new method for active sound quality control of vehicle interior noise.
vehicle interior noise; loudness; variable step-size; Filtered-x Least Mean Square (FxLMS) algorithm; Active Noise Equalization (ANE) algorithm
U467.4+93
A
1000-3630(2019)-05-0574-06
10.16300/j.cnki.1000-3630.2019.05.015
2018-04-25;
2018-06-25
国家自然科学基金项目(51675324)、上汽基金项目(1523)
张帅(1989-), 男, 河南商丘人, 硕士, 研究方向为汽车NVH测控技术、车内噪声主动控制方法。
王岩松, E-mail: jzwbt@163.com
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
数学年刊A辑(中文版)(2020年3期)2020-10-27 02:44:16
中国传媒科技(2018年6期)2018-07-25 01:05:06
中学生数理化·八年级物理人教版(2017年9期)2017-12-20 08:11:30
新闻传播(2016年3期)2016-07-12 12:55:36
西部广播电视(2015年5期)2016-01-16 03:45:06
河北科技大学学报(2015年5期)2015-03-11 16:16:37
噪声与振动控制(2015年4期)2015-01-01 07:08:05
电测与仪表(2014年2期)2014-04-04 09:04:00
振动、测试与诊断(2014年4期)2014-03-01 01:14:09
