多飞行模式垂直起降无人机过渡飞行控制策略
2019-11-04 08:12刘志豪鹿存跃马艺馨
上海交通大学学报 2019年10期
刘志豪,闵 荣,方 成,易 超,鹿存跃,马艺馨
(1.上海交通大学 电子信息与电气工程学院,上海 200240;2.西北工业大学 第365研究所,西安 710072)
尾座式垂直起降(VTOL)无人机(UAV)是一类多飞行模式的VTOL UAV[1-2],它综合了固定翼和旋翼无人机的优点,具有巡航时间长、可垂直起降等优点,能适应城市、丛林、战场等特殊环境,具有作为通用无人机的发展潜力[3-5].但是,目前对尾座式VTOL UAV的研究还主要集中在无人机的结构设计方面,对其控制理论的研究较少,特别是尚未彻底解决无人机过渡飞行控制策略等技术难点,因而制约了尾座式VTOL UAV的推广和应用[6-8].
过渡飞行模式控制策略指的是控制无人机从悬停模式向巡航模式安全过渡的控制策略.Stone和Lyu等[9-10]采用比例-积分-微分(PID)控制器分别控制无人机的位置和姿态,初步解决了无人机过渡飞行控制策略的有无问题,但在过渡飞行阶段,无人机的飞行性能较差,模式转换时间长,高度变化剧烈.Oosedo等[11]提出了最小转换时间的飞行转换策略,该方法通过提升无人机过渡飞行模式的飞行速度,加快了无人机的转换速度,但是无人机过渡飞行阶段高度变化大的问题尚未得到解决.饶进军等[12]提出了利用额外的辅助机构加快尾座式VTOL UAV过渡飞行模式转换速度的控制方法,但额外的辅助机构增加了无人机质量,缩短了无人机的巡航时间.
从国内外研究现状可以看出,目前尾座式VTOL UAV的过渡飞行控制策略多侧重于加快无人机过渡飞行时的转换速度,而对过渡飞行时影响很大的高度变化等问题的相关研究较少.因此亟需提出新的模式转换控制策略,以满足尾座式VTOL UAV模式转换过程速度快、高度变化小且实时可控的需求.为了改善尾座式VTOL UAV过渡飞行模式的飞行性能,提出了最快模式转换定高控制策略,同时对过渡飞行阶段的模式转换速度和飞行高度变化两个参数进行优化.无人机在模式转换过程中保持竖直方向的受力平衡,以提高模式转换时的稳定性.选取了经典PID控制策略和最快模式转换控制策略2种尾座式VTOL UAV过渡飞行控制策略,与本文提出的最快模式转换定高控制策略进行模拟和实验对比分析.
1 动力学建模与控制系统设计
1.1 无人机系统组成
尾座式多飞行模式VTOL UAV由机身、动力系统、控制系统等部分组成.2个机翼、4组电动机-螺旋桨系统和碳纤维支架构成了无人机的机身.2个机翼对称安装在机身的两侧,用于提供无人机巡航飞行时所需升力.4组电动机-螺旋桨系统呈X形分布安装在2个机翼翼展的两端,用于提供无人机所需拉力和推力.碳纤维支架起到支撑机身和安置载荷的作用.无人机的控制系统、能源系统、有效载荷等集成安置于无人机重心处.无人机的结构示意图如图1所示.

图1 尾座式VTOL UAV结构示意图Fig.1 Structure diagram of tail-mounted VTOL UAV
尾座式VTOL UAV有悬停、过渡和巡航3种飞行模式.图2描述了该无人机的飞行模式转换流程.无人机垂直起飞进入到悬停模式,然后通过控制电动机转速差调节俯仰姿态进入过渡模式,当无人机姿态接近水平且速度达到巡航速度时完成过渡飞行,进入巡航模式,反之亦然.

图2 尾座式VTOL UAV飞行模式转换Fig.2 Flight mode transition of tail-mounted VTOL UAV
在悬停模式,电动机螺旋桨所产生的力主要用于平衡重力.相邻的螺旋桨转向相反,相对的螺旋桨转向相同,抵消了陀螺效应和气动力矩,实现了无人机的悬停和姿态控制.在过渡模式,无人机逐步改变俯仰角,使机身逐渐倾转至接近水平.在此过程中,无人机俯仰力矩逐渐增大,螺旋桨产生的拉力在竖直方向上的分力不断减小,螺旋桨的动力逐渐从主升力变为主推力.在巡航模式,机翼产生的升力用于平衡飞机的重力,螺旋桨产生的力主要作为推力,用于抵消飞机的阻力或提升飞行速度.
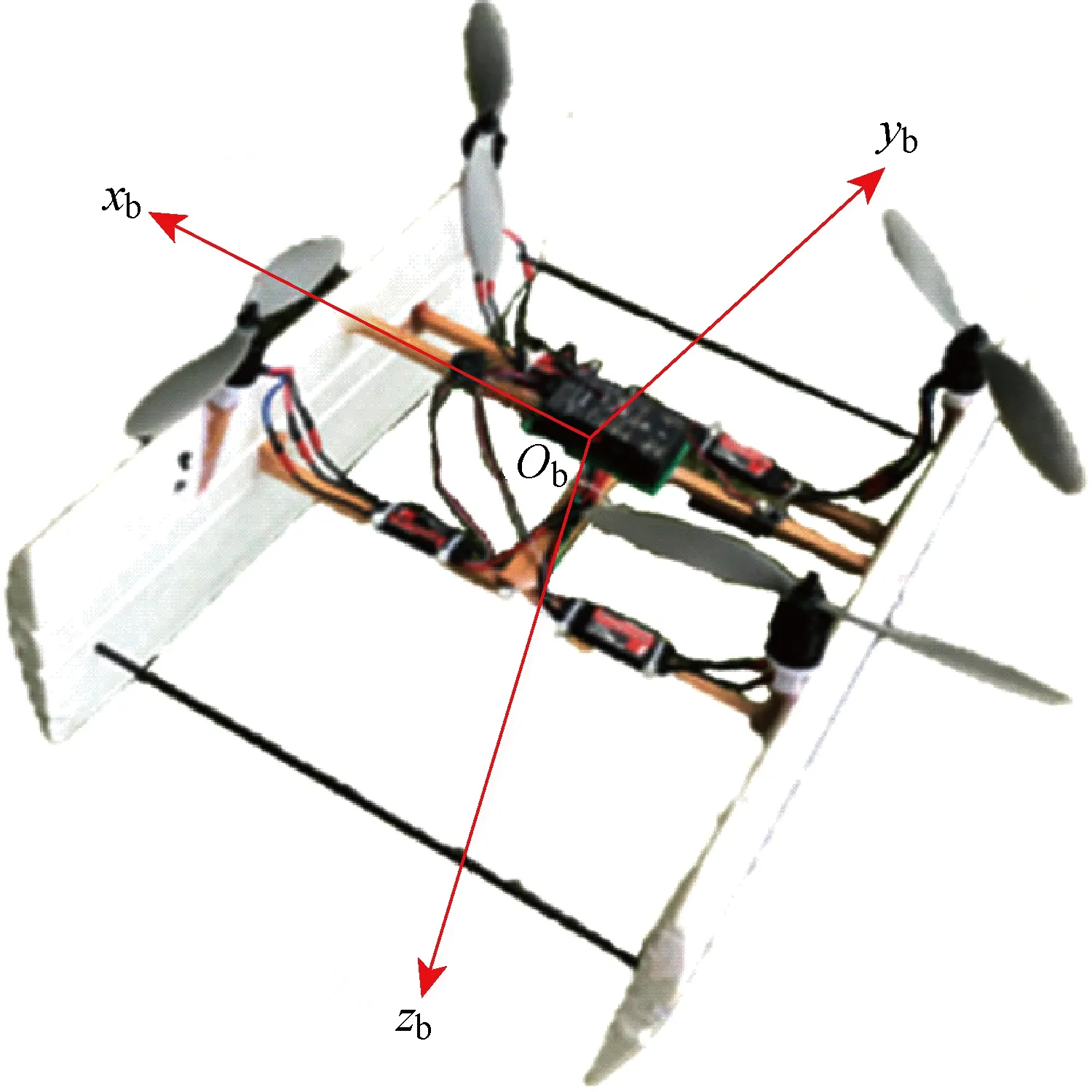
图3 尾座式VTOL UAV机体坐标系示意图Fig.3 Coordinate system of tail-mounted VTOL UAV
1.2 无人机动力学建模
尾座式VTOL UAV的重心位置选取为机体坐标系原点Ob.如图3所示,机体坐标系Obxbybzb坐标系符合右手法则,xb轴指向无人机机头前进的方向,yb轴指向无人机的右侧,zb轴的方向根据xb轴和yb轴由右手法则确定,指向无人机的下方,整个坐标系与无人机固联.地理坐标系是无人机进行导航计算时的坐标系,用于研究无人机相对于地面的运动状态,确定机体的空间位置坐标.在地面上选一点作为无人机起飞位置,地理坐标系Ogxgygzg的xg轴指向北,yg轴指向东,zg轴竖直指向地心.
尾座式VTOL UAV的动力学方程包括绕3个轴的转动方程和3个轴向的线运动方程,由牛顿第二定律可得
(1)
(2)
式中:F为无人机受到的合外力;m为无人机的质量;v为无人机的飞行速度;M为无人机受到的总力矩;L为无人机的动量矩;t为时间.
尾座式VTOL UAV在飞行时所受到的力有重力FG,4个螺旋桨的推力FT和空气动力FA,合外力F可表示为
F=FG+FT+FA
(3)
将无人机的重力FG转换到机体坐标系中,利用欧拉角表示为
(4)
式中:g为重力加速度;θ为俯仰角;φ为滚转角.
尾座式VTOL UAV的4个螺旋桨产生始终垂直于桨盘的推力,因此螺旋桨的总推力可表示为
FT=F1+F2+F3+F4
(5)
式中:Fi(i=1,2,3,4)为第i个螺旋桨产生的拉力.
无人机在飞行过程中所受的空气动力有机翼向上的升力FL和向后的阻力FD:
(6)
(7)
式中:ρ为大气密度;S为机翼的面积;CL为机翼的升力系数;CD为机翼的阻力系数.
将式(3)~(7)代入式(1)中,可以推导出无人机的质心平动方程:

gcosθcosψ
(8)
(9)

gsinθ
(10)
式中:(ax,ay,az)、(vx,vy,vz)和(ωx,ωy,ωz)分别为无人机在(xg,yg,zg)3个方向的加速度、速度和角速度;ψ为偏航角;α为无人机飞行时的攻角.
尾座式VTOL UAV受到的外力矩除了旋翼引起的气动力矩、陀螺力矩外,考虑到机翼也会因为气动力而引起力矩,故作用于无人机的外力矩由旋翼气动力矩MTc、陀螺力矩MTg和机翼气动力矩MA组成,总力矩可表示为
M=MTc+MTg+MA
(11)
旋翼气动力矩MTc由无人机螺旋桨转速差产生,用于控制无人机的姿态运动,具体包括滚转力矩Mxc、俯仰力矩Myc和偏航力矩Mzc,且有:
(12)
式中:d为旋翼机部分的力臂长度.
陀螺仪效应所引起的力矩MTg,可表示为
(13)
式中:Jz为螺旋桨陀螺效应系数;ni为第i个电动机的转速.
机翼气动力矩MA包括横向和纵向两个方向的力矩.因为尾座式VTOL UAV在过渡飞行模式和巡航模式下可以忽略滚转运动,基本没有侧滑发生,所以可以忽略横向力矩.纵向力矩是作用于无人机外力绕机体坐标系yb轴而产生的力矩,具体包括稳定力矩Mw和阻尼力矩Mr,且有
(14)
(15)

将式(11)~(15)代入式(2),可以推导出无人机的质心转动方程:
(18)
式中:Ix,Iy,Iz分别为无人机在xg,yg,zg轴上的转动惯量;Fs为螺旋桨滑流在机翼上的作用力.
1.3 总体控制系统设计
尾座式VTOL UAV控制系统具有4个层次,具体包含位置控制、姿态控制、动力分配以及电动机控制,如图4所示.首先将无人机的期望轨迹输入位置控制器,可以算出期望拉力以及期望姿态角;姿态控制用于解算期望姿态的力矩;动力分配通过解算期望力矩以及期望拉力/推力得出4个电动机的期望转速;电动机控制则根据期望转速解算出期望油门指令.

图4 总体控制流程图Fig.4 Diagram of overall control
2 过渡飞行模式控制策略与模拟
为研究尾座式VTOL UAV过渡飞行模式的控制策略,需要先引入控制对象.本文的尾座式VTOL UAV选用一种高升阻比的翼型FX63-137,展弦比设计为 3.8.因为翼型和机型设计的原因,无人机无法实现完全的水平飞行,所以模拟实验只考虑无人机俯仰角倾转到76° 的情况,即无人机巡航模式的攻角为14°.该无人机的主要设计性能参数如表1所示.
定义无人机悬停、过渡和巡航的3种飞行模式:悬停模式,θ=0°,vx=0;过渡飞行模式,-76°≤θ≤0°,0≤vx≤12.5 m/s;巡航模式,α=14° (θ=-76°),vx=12.5 m/s.

表1 无人机主要性能参数表Tab.1 Parameters of the system of UAV
2.1 经典PID控制策略
经典PID控制策略是实现过渡模式最常用的控制策略,其姿态和飞行高度由PID反馈控制器调整,控制系统流程如图5所示.
利用经典PID控制策略,对无人机由悬停模式向巡航模式的转换过程进行了模拟,以研究过渡模式的飞行性能.模拟中,设置初始高度和期望高度均为0,过渡模式从t=0开始.图6所示为无人机过渡模式的姿态(俯仰角θ)、飞行速度vx和高度h的模拟结果.由图6(a)可见:在t=2.12 s时达到巡航时的攻角14°(即θ=-76°),而此时飞行速度还未达到巡航速度 12.5 m/s.由图6(b)可见:当t=2.95 s时,水平飞行速度达到巡航速度,即整个过渡飞行用时 2.95 s,此时无人机的高度与期望高度相差 2.83 m.结果表明整个飞行模式转换用时较长,无人机飞行高度变化较大.

图5 经典PID控制系统流程图Fig.5 Flow chart of classical PID control system
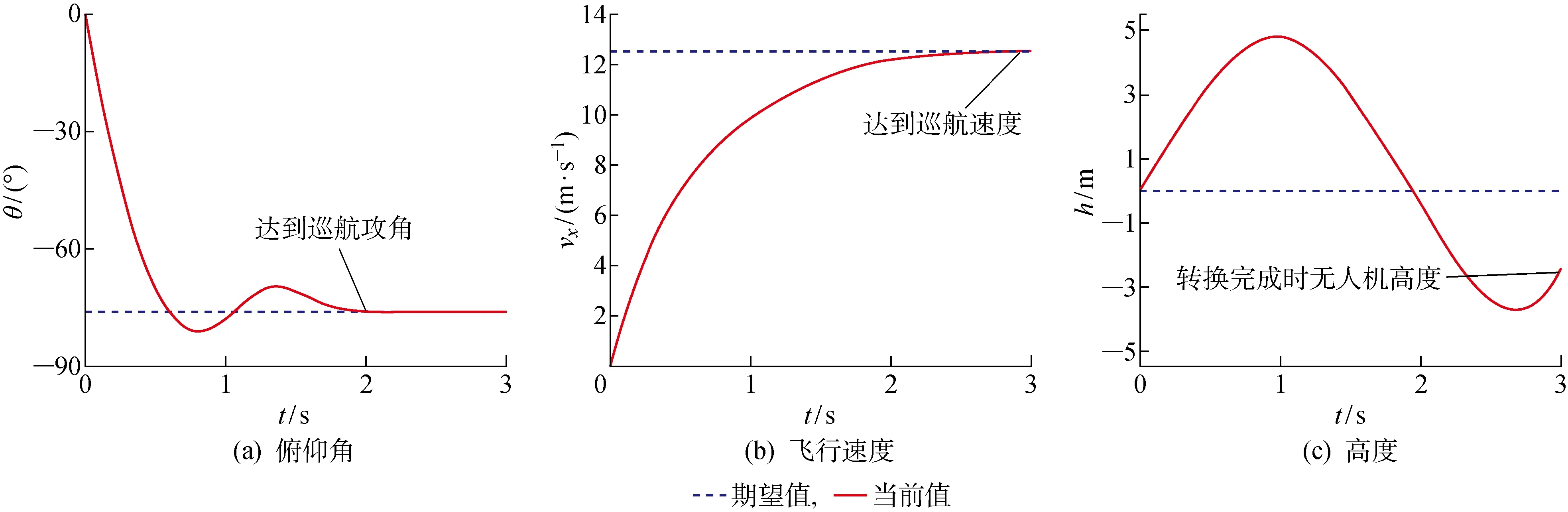
图6 过渡模式下经典PID控制策略模拟结果Fig.6 Simulation results of the classical PID control in the transition mode
2.2 最快模式转换控制策略
为了增加无人机的飞行模式转换速度,提出了最快模式转换控制策略.为了实现无人机最快模式转换的过渡模式,可以增大无人机俯仰角的角加速度,使俯仰角在过渡模式中的角加速度达到最大.yg轴方向的角加速度如式(17)所示,将最快模式转换控制策略问题转换为二维的最优化问题,则该控制策略为
(19)
式中:Fmin和Fmax分别为保证无人机稳定飞行的最小推力和最大推力.
在最快模式转换控制策略中,利用最大的俯仰力矩实现了俯仰角的角加速度最大.在过渡模式中,螺旋桨不断地输出最大俯仰力矩.

图7 过渡模式下最快模式转换控制策略模拟结果Fig.7 Simulation results of the fastest transition speed control in the transition mode
最快模式转换控制策略模拟中,设置初始高度和期望高度均为0,过渡模式从t=0开始.图7所示为无人机过渡模式的姿态(俯仰角θ)、飞行速度vx和高度h的模拟结果.由图7(a)可见:在t=1.74 s时达到巡航时的攻角14°(即θ=-76°),而此时速度还未达到巡航速度 12.5 m/s.由图7(b)可见:当t=2.45 s时,飞行速度达到巡航速度 12.5 m/s,即整个过渡飞行用时 2.45 s,此时无人机的高度与期望高度相差 1.47 m.结果表明:无人机的攻角未达到巡航模式飞行的攻角14° 前,螺旋桨竖直向上的分拉力与机翼的升力之和大于无人机的重力;当无人机的攻角达到预设值时,速度尚未达到巡航速度 12.5 m/s,此时螺旋桨竖直向上的分拉力与机翼的升力之和不足以抵消无人机的重力,导致无人机掉高.
2.3 最快模式转换定高控制策略
最快模式转换过渡策略加快了无人机过渡模式的转换速度,相较于经典PID控制策略,飞行模式转换时间缩短了 0.5 s,但是转换过程中无人机的掉高问题仍然需要改进,为此提出了最快模式转换定高控制策略.无人机的机身从竖直方向转向水平方向的时候,在竖直方向上的受力有螺旋桨拉力在竖直方向上的分力、机体重力和机翼产生的升力,如图8所示.

图8 无人机在模式转换时的受力分析Fig.8 Force analysis of UAV during mode conversion
无人机在过渡飞行时不掉高的一个前提条件是无人机在竖直方向受到的合力应始终为0.在无人机动力学建模时,已知zg轴方向的加速度如式(10)所示,将该转换策略问题转化为二维最优化问题,最快模式转换定高控制策略为
(20)
在设计转换策略时,忽略了风的影响和一些小的干扰,例如陀螺效应所引起的力矩等.过渡模式中无人机的滚转角和偏航角保持不变.yg轴方向的角加速度式(17)和zg轴方向的加速度式(10)可以简化为
式(21)以及(22)中的参数满足式(20)转换策略的约束条件.利用序列二次规划求解出无人机模式转换时满足约束条件(无人机yg轴方向的角加速度最大,沿zg轴方向合力为0)的电动机螺旋桨拉力.在每一个速度和攻角下都会产生满足约束条件的最优拉力.
无人机在飞行模式转换时,根据机体传感器测量得到速度和攻角,就可以输出这一时刻电动机螺旋桨的期望拉力,并且将期望拉力分配给每一个电动机.

图9 最快模式转换定高控制策略模拟结果Fig.9 Simulation results of the fastest transition speed with constant altitude control
在最快模式转换定高控制策略模拟中,设置初始高度和期望高度均为0,过渡模式从t=0开始.图9为无人机过渡模式的姿态(俯仰角θ)、飞行速度vx和高度h模拟结果.由图9(a)和(b)中可见:在t=1.97 s时达到巡航攻角14°(即θ=-76°)和速度 12.5 m/s,即整个过渡模式用时 1.97 s.此时,无人机的高度与期望高度相差 0.56 m.模拟结果表明:飞行模式转换用时 1.97 s,比经典PID控制和最快模式转换控制策略所用时间都短,无人机在模式转换过程中的高度变化量也小于使用经典PID控制和最快模式转换控制策略时的高度变化量,仅为 0.56 m.
2.4 模拟结果分析
为了验证3种控制策略的效果,进行了经典PID控制策略、最快模式转换控制策略和最快模式转换定高控制策略的模拟.初始条件:θ=0°,φ=0°,ψ=0°,vx=0,选取无人机的初始高度和期望高度均为0,无人机从t=0开始进入飞行模式转换.对比模拟结果如表2所示.

表2 模拟结果对比Tab.2 Comparison of simulation results
模拟结果表明:经典PID控制策略在过渡模式中,模式转换时间最长,高度变化也最大;最快模式转换控制策略通过加快无人机的转换速度,无人机达到巡航攻角用时是最短的,仅为 1.74 s,而此时无人机的飞行速度尚未达到巡航速度 12.5 m/s,导致无人机在过渡时螺旋桨竖直方向拉力的分力和机翼的升力之和无法抵消无人机的重力,无人机掉高;最快模式转换控制策略的确加快了无人机俯仰角的转换速度,但是无人机飞行速度到达巡航标准的时间大于俯仰角的达标时间,因此无人机在转换过程中,螺旋桨竖直方向的分拉力与机翼的升力之和小于无人机的重力,无人机的高度变化大.
最快模式转换定高控制策略优化了转换速度和高度变化两个飞行参数,同步了俯仰角达到巡航攻角14° 和飞行速度达到巡航速度 12.5 m/s的时间.无人机在飞行模式转换过程中,螺旋桨拉力在竖直方向分力的减小量与机翼产生升力的增加量能够保持动态平衡,并可抵消无人机的重力,保持无人机在模式转换过程中竖直方向的受力平衡.最快模式转换定高控制策略比经典PID控制策略和最快模式转换控制策略的时间分别缩短了 0.98和0.48 s,高度变化量分别减小了 2.27和0.91 m;最快模式转换定高控制策略从模式转换时间和高度变化两个方面均优于经典PID控制策略和最快模式转换控制策略,提高了无人机过渡模式的控制精度和稳定性能.
3 飞行实验
为了验证模拟结果,本文对最快模式转换定高控制策略进行了实际飞行实验,尾座式VTOL UAV的原理样机如图10所示,样机的系统参数与模型一致.尾座式VTOL UAV在飞行实验时,设置初始条件:无人机初始处于悬停模式,姿态角(俯仰角、滚转角、偏航角)均为0,vx=0,测试环境的风速小于1 m/s,从 4.5 s开始进入飞行模式转换.

图10 尾座式VTOL UAV原理样机Fig.10 Prototype of tail-mounted VTOL UAV

图11 实际飞行中俯仰角和滚转角变化曲线Fig.11 Curves of roll and pitch in real flight
尾座式VTOL UAV的实际飞行姿态变化如图11所示.由图可见:0~4.5 s内,无人机处于悬停模式,俯仰角和滚转角基本保持不变;在 4.5 s时,无人机进入模式转换,俯仰角跟踪到期望的俯仰角 -76° 的用时不到2 s,滚转角保持不变,实现了较快速度的过渡飞行模式角度转换.
尾座式VTOL UAV在实际飞行中水平速度的变化如图12所示.由图可见:0~4.5 s内,悬停模式下尾座式VTOL UAV水平飞行速度基本保持为0;在 4.5 s时,无人机进入模式转换,无人机水平飞行的速度快速增大至巡航速度 12.5 m/s,用时 2.3 s.飞行实验的数据表明:无人机俯仰角达到巡航攻角的时间和飞行速度达到巡航速度的时间基本同步,与模拟分析结果一致.
无人机转换飞行模式的高度变化如图13所示.由图可见:0~4.5 s内,悬停模式下尾座式VTOL UAV的飞行高度基本稳定在 4.5 m;无人机在 4.5 s时进入转换模式,高度有一定的变化,模式转换后的高度与期望高度相差 1.5 m.产生该误差的原因是因为电动机响应延迟导致控制器给出的电动机转速值并不是真正的最优转速,但作为初步设计,得到的实验结果与模拟结果基本符合.尾座式VTOL UAV悬停、过渡和巡航模式下的实际飞行实验如图14所示.

图12 实际飞行速度变化曲线Fig.12 Curve of velocity in real flight

图13 实际飞行中转换模式下高度变化曲线Fig.13 Curve of altitude change in transition mode in real flight

图14 尾座式垂直起降无人机3种模式实际飞行实验Fig.14 Practical flight experiment of three modes of tail-mounted VTOL UAV
4 结语
针对尾座式VTOL UAV过渡模式的飞行控制策略进行了深入研究,提出了最快模式转换定高控制策略,通过模拟和实验的手段分析对比了经典PID控制策略、最快模式转换控制策略和最快模式转换定高控制策略的飞行效果.最快模式转换定高策略优化了转换速度和高度变化两个飞行参数,同步了俯仰角达到巡航攻角14° 的时间和飞行速度达到巡航速度 12.5 m/s的时间,保持无人机在模式转换过程中竖直方向的受力平衡.最快模式转换定高控制策略比经典PID控制策略和最快模式转换控制策略的时间分别缩短了 0.98和0.48 s,高度变化量分别减小了 2.27和0.91 m;飞行控制效果明显优于经典PID控制策略和最快模式转换控制策略.飞行实验结果表明:最快模式转换定高控制策略能够保证无人机在过渡模式快速平稳地实现飞行模式转换.
本文为尾座式VTOL UAV过渡模式控制提出了一种可行的控制策略,解决了尾座式VTOL UAV所面临的控制难题,有助于VTOL UAV应用的推广和普及.
猜你喜欢
热带作物学报(2021年1期)2021-02-22
航空发动机(2020年3期)2020-07-24
宇航总体技术(2019年5期)2019-10-11
北京航空航天大学学报(2017年7期)2017-11-24
中学科技(2017年10期)2017-11-04
航空模型(2016年10期)2017-05-09
振动与冲击(2015年2期)2015-05-16
空气动力学学报(2015年3期)2015-04-14
装备学院学报(2015年6期)2015-01-10
中国舰船研究(2014年1期)2014-05-14