
基于能量优化的无人机喷施规划组合算法研究
2019-11-04 09:20李继宇罗慧莹朱长威李一凡
农业机械学报 2019年10期
李继宇 罗慧莹 朱长威 李一凡 汤 峰
(1.华南农业大学工程学院, 广州 510642; 2.国家精准农业航空施药技术国际联合研究中心, 广州 510642; 3.华南理工大学软件学院, 广州 510006)
0 引言
作为新型农用机械,农用植保无人机具有小、轻、方便运输、无需跑道、操控灵活的特点,能够满足不同地域、地块和作物的植保需求[1-4]。而且,单位面积施药量小,作业效率高;同时,在应对农村劳动力减少及农田爆发性病虫害等方面具有突出优势[4-8]。但是,目前仍未有效解决植保无人机存在的自主作业能力差、承重小、续航时间短的问题[8-11]。
大部分植保无人机作业是基于遥控指挥的,人为因素依赖大,作业效果不理想,文献[12-13]利用GPS坐标采集无线传输系统,通过目视操控进行航线规划试验,指出人为即时规划的飞行路线与理论航线偏差严重、作业遗漏率及重复率高等问题。作业过程中,由于能量限制及作业经验不足,植保无人机因电量过低而迫降到农田里的情况时有发生,甚至有突然失控坠机的危险[14-15]。因此,在无人机作业前,应根据作业区域、喷施幅度、飞行速度、喷施流量合理规划出飞行航线,使无人机以固定高度沿着规划好的航线自主飞行作业,即可解决作业遗漏率及重复率高等问题。在多架次作业中,若是按照传统载荷进行分配(单架次满载起飞作业,喷施完农药后返航),无人机能量及载荷耗尽时必须返航的时机并不一致,则会产生更多的返航航程,而且无人机作业或返航时载荷有剩余,亦会导致能量浪费、时间延长、作业效率低等问题。
国外无人机研究起步较早,已有大量使用不同算法或不断改进现有算法对无人机航线规划的相关研究,如YAO等[16]基于干扰流、NURI等[17]使用平行进化算法、SANDER等[18]使用进化算法、CHEN等[19]改进中心力最优算法,从不同算法方向对三维航线的规划进行优化,而ATHINA等[20]基于微分进化,POURVAZIRI等[21]使用混合多种群遗传算法对二维航线进行规划,取得了许多成果。但目前大部分规划仅集中在航线规划的优化上,未考虑到实际作业中航线规划受有效载荷和能量的限制问题。
我国从20世纪80年代开始,亦对无人机航线规划方法进行了研究,但是大部分文献仅提及了航线规划(航程最短、能耗优化、损耗风险)的计算方法[22]。也有学者对航线规划进行了更精细的分析和优化。如,陈星[23]针对无人机多目标的航线规划对蚁群算法进行改进,并提出了一种新的启发式任务分配算法;徐博等[24]针对不规则区域的多余覆盖现象对算法进行了改进;凌诗佳[25]则对无人机航线规划系统进行了改造;张鲁遥等[26]提出了无人机自动飞行航线策略;陈侠等[27]提出无人机绕开威胁的三维航线规划等。其中,徐博等[28]虽指出,对作业航线进行规划能够缩短无人机的区域间调度飞行距离及作业距离,但仍沿用了将单一起点设置为作业规划中补给点、补给完毕后返航继续喷施作业的理想作业方式。对于大田喷施作业来说,植保无人机需多次补充载荷和能量而往返于单一起点,往返距离越长,能耗就越大,增加了作业成本和时间。因此,从实际作业角度,此类方式对于无人机载荷及能量的规划并未达到最优配置。在无人机实际作业中,往往根据无人机能量载荷消耗完毕时的航线中断点,在田边设置多个点进行补给。通过设置非起点为补给点的方法,根据减少无人机往返于补给点的航程来规划作业航线,符合现实作业需要,并能够极大程度地降低无人机航线能耗。
对于需要高效、节能、安全的农用植保无人机喷施作业来说,航线规划只是喷施作业规划的一部分,喷施作业规划还应包括载荷规划、能量规划等。目前国内外研究有效载荷算法的较少,往往作为航线规划中的一部分进行简单说明,针对能量的规划大多与航线规划相结合。
针对航线规划的现实可行性,本文研究无人机喷施规划组合算法,以实现无人机喷施组合规划达到航线、载荷、能量三者相结合的最优配置。
1 基本思路
本文基于能量优化对无人机喷施规划方法进行研究,并提出包括航线规划算法、有效载荷算法、能量预警算法在内的组合算法,优化无人机大田喷施作业方式,减少作业经济成本及时间,提高作业效率和安全性。
无人机喷施规划流程如图1所示。作业前,先根据作业区域对预设航线进行规划,在保证喷施作业航线不变的情况下,增加补给点的设置,通过算法计算得出返航点与补给点之间的最短航程,进而合理分配返航点,有效缩短总航程,首先从航线上降低无人机的能耗。确定作业航线及返航点后,根据喷施作业航程及喷施流量计算出无人机单架次作业的最少载荷,以作业最小载荷起飞作业,当无人机飞行作业至规划的返航点时,无人机载荷恰好消耗完毕,然后空载飞回补给点,不仅进一步从载荷上降低无人机作业能耗,通过提高能量利用率,延长无人机续航时长,降低作业过程中因电量不足而无法作业的风险。然后结合规划所得的作业航程及作业载荷数据,即可利用算法来实时计算无人机的作业能耗及电池的剩余能量,并预估无人机下一架次所需能量,再判断剩余能量是否满足作业条件而决定无人机是否允许起飞作业,提醒更换电池或充电,提高无人机作业的安全性。最后通过喷施规划地面站将该组合算法付诸实现,使无人机喷施作业高效化、自主化、专业化。

图1 无人机喷施规划流程图Fig.1 Procedure of UAV spraying planning
2 无人机喷施规划组合算法
2.1 基础航线预设
植保无人机自主作业的基础是对作业区域全覆盖航线的预设,需先根据作业区域地理信息构建确定形状、长宽的作业区域边框,然后根据实际喷施幅度规划航线,并由此生成航点分布,依次连接得到作业路径总长度,结合实际作业中无人机施药量和续航时长,设置最佳架次数、载荷量、返航点及补给点。因此需要先构建全覆盖航线预设。为了方便航线预设及减少航线预设时的误差,采用栅格法对工作区域进行划分。以规则矩形和不规则梯形为例。
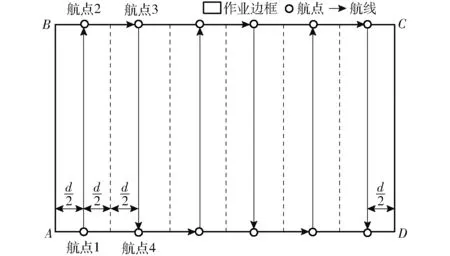
图2 规则作业区域全覆盖航线预设Fig.2 Full coverage route presupposition in regular operation area
对于规则形状(如矩形农田)的待作业区域,如图2所示,ABCD为农田边框,长为l,宽为b,喷施幅度为d,计算得出应设置2l/d个航点,依次连接所有航点形成飞行航线。
对于不规则作业区域的航线预设,需要将区域内的航点按照实际区域边缘作出相应的调整,如图3所示。
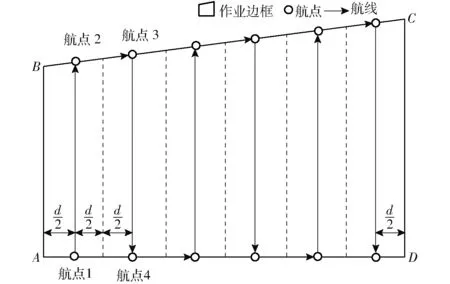
图3 不规则作业区域全覆盖航线预设Fig.3 Full coverage route presupposition in irregular operation area
2.2 航线规划算法
2.2.1补给点设置
对于植保无人机,确定喷施全覆盖航线规划后,在农田面积比较大的情况下,在多架次返航航线的规划中如何设置对无人机能量和载荷进行补充的补给点对航线长短起决定性作用。如图4所示,B为补给点,f1、f2、f3为本文的返航点。
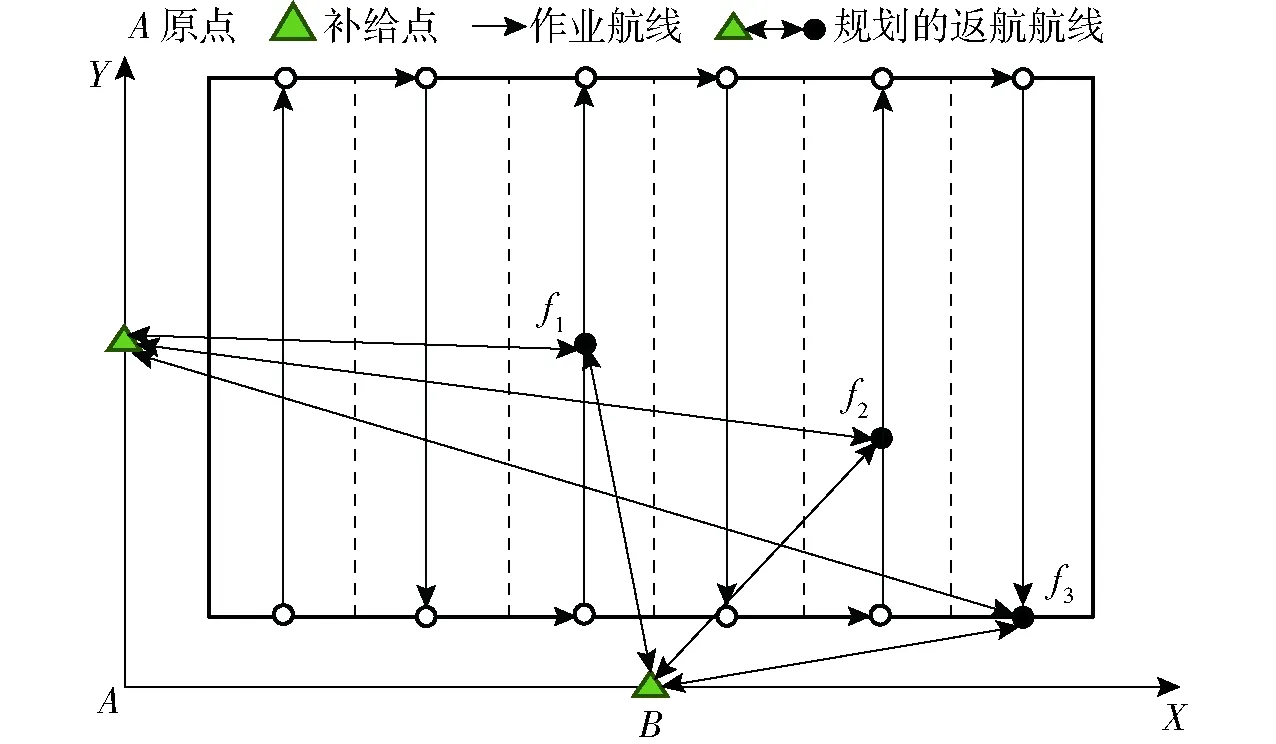
图4 补给点的位置与返航航程的关系Fig.4 Relationship of supply points location and operation channel
为便于算法研究,本文返航均指无人机返回补给点,而非起航点。
与理想作业中使用单一起点作为补给点相比,在路边设置补给点,能够有效降低往返补给点的航程,而减少了无人机的返航能耗。
补给点的设置,不仅需兼顾最多的返航点,并能保证作用范围内的返航点在往返补给点的过程中不会因能量不足而坠毁。因此,单架次作业结束后,无人机的剩余航程Hk必须满足条件
(1)
式中Cp——无人机作业最长航程为Hp消耗的总能量
Cm——无人机总能量
Pk——空载飞行功率
m——返航点与补给点B之间的单次航程
补给点可在作业区域的长宽边进行设置,如图5所示,在宽边设置补给点,随着作业区域长度的增加,返航点逐渐增多,所需返航航程越长,因此将补给点放置在长边。
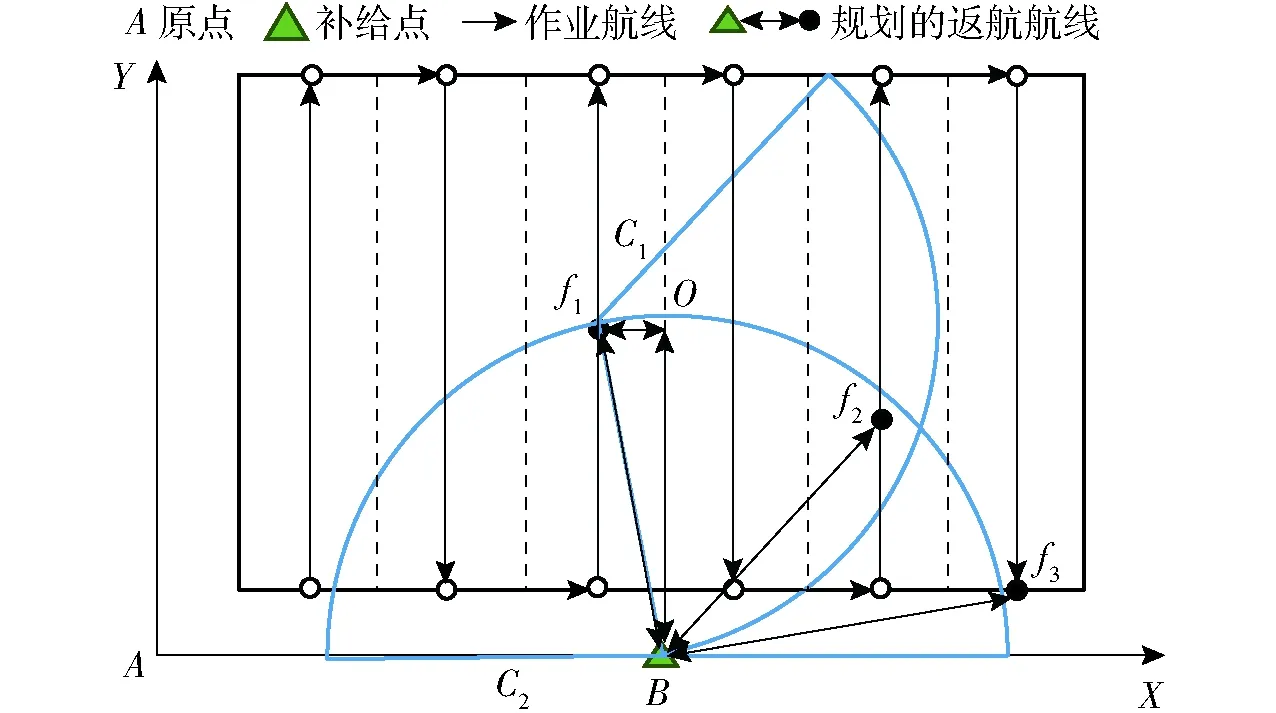
图5 补给点与返航点的关系Fig.5 Relationship of supply point and return points
长边可分为北长边及南长边,补给点的设置并不影响返航航程,但为便于实际作业,起航点与补给点应处于同一侧,减少人员劳动,为方便规划,将补给点与起航点均放置于南长边。
如图5所示,未经规划的第1个返航点为f1,假设与补给点之间的最长安全返航航程为Hk/2。以f1为圆心,Hk/2为半径,所得到的圆C1与补给点所在直线的交点即为无人机的补给点B。再以B为圆心,Hk/2为半径,得到的圆C2与作业区域的交界范围即为无人机安全返航的范围。
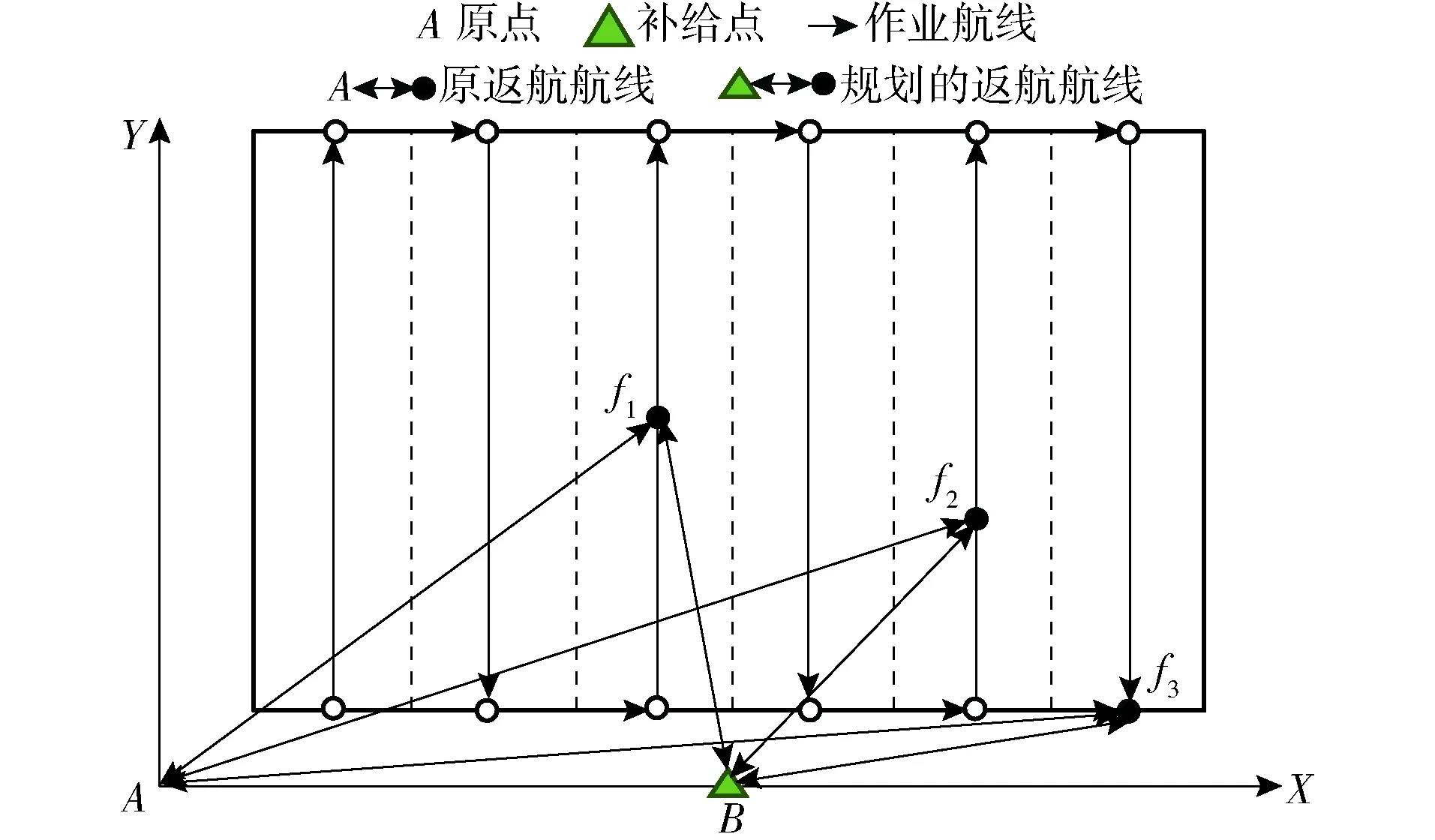
图6 补给点作用下的无人机作业航线Fig.6 UAV operating route map under supply point
2.2.2补给点与返航点的关系
确定补给点后,返航点在航线段上的选取位点,直接影响到返航航程,从而影响无人机能耗。根据航线最短的原则及已确定补给点的位置,对返航点的选取展开研究。
作业架次关系式为
(2)
式中H——农田总航程
j——无人机作业架次,j=1,2,…,n
其中,Hm>Hp,Hm为无人机满能量单次最大航程。
返航点在确定之前被设置为“待确定返航点”。设补给点一侧为S方位,竖向航线段为N方位,O为补给点,A、B、C、D、E、F、G均为待确定返航点,其中A、C、F分别为所在航线段的中点,其余为两个横向航线段的两端。返航点及补给点之间的连线段为返航航线。待确定返航点的设置有以下两种情况:

(2)图7c为将返航点设置在横向航线段的中点C上,图7d为将返航点设置在横向航线段两端的航点B或D上。从返航点开始,假设均经过相同的作业航程,使得两个返航点间的直线距离为2d,则经计算得各自返航线段总长lOC+lOF≈lOD+lOG≈lOB+lOE。因此,返航点在横向航线段上的选取位置不影响返航路线的长短。
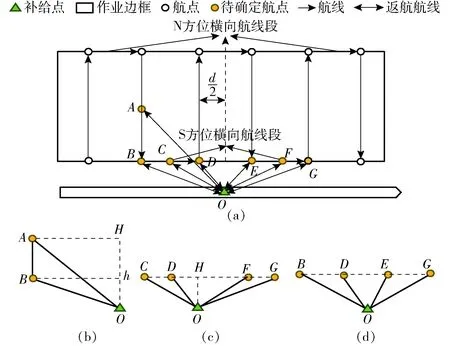
图7 无人机作业返航点优选示意图Fig.7 Optimization sketch of UAV operation return points
考虑到航线预设时已将横向航线段左右两侧的端点设为航点,直接将预设航点转换为返航点更快速高效。综上所述,将返航点设置在S方位横向航线段的左侧或右侧航点上能够保证返航点离补给点距离最近。
2.2.3最优航线的确定
如图8所示,将返航点设置在S方位横向航线段的左侧航点上继续进行航线规划算法的研究。
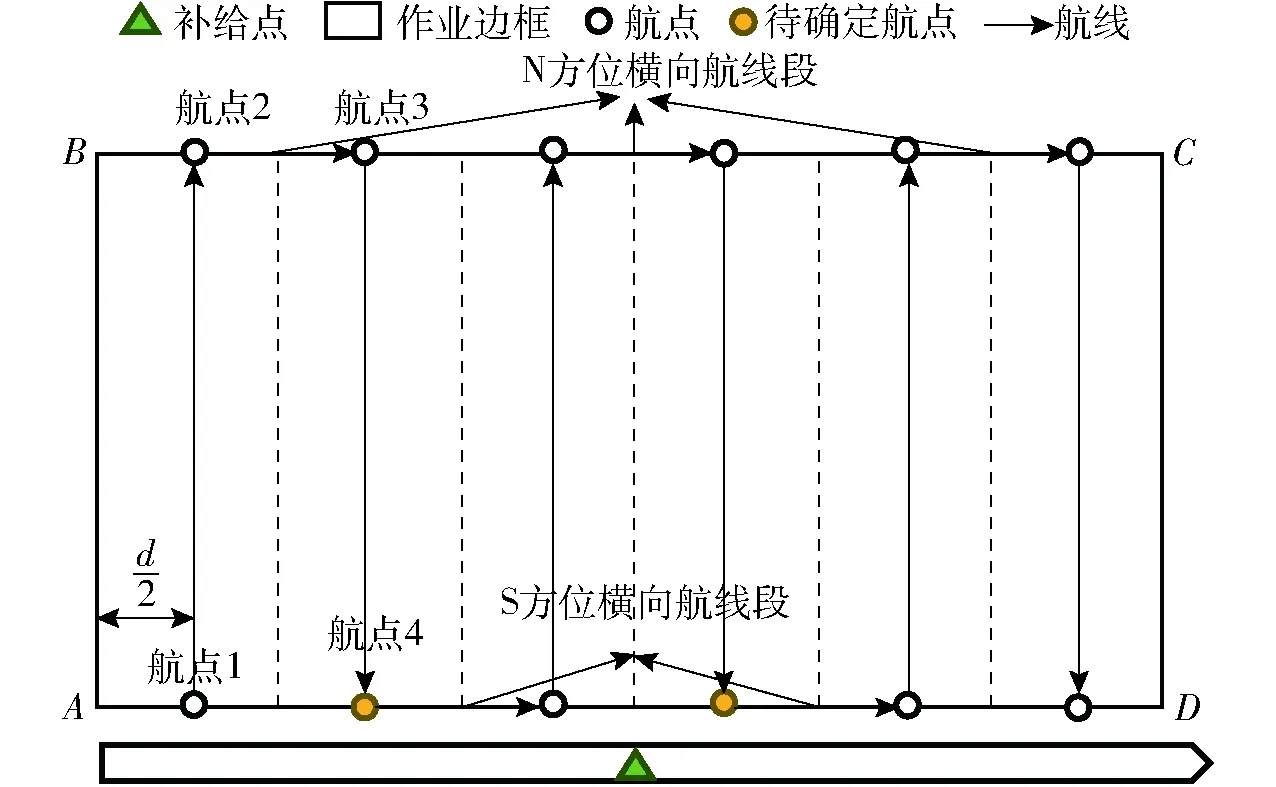
图8 无人机待确定返航点分布图Fig.8 Distribution maps of UAV return points to be confirmed
在实际作业的航线规划中,从起点开始的4个连续的航点构成的航线是一次无人机飞行作业往返,图9为无人机飞行航点分布图,航点4k+1、4k+2、4k+3、4(k+1)构成的航线为一次飞行作业往返,待确定返航点为第4k(k=1,2,…,n)个航点。
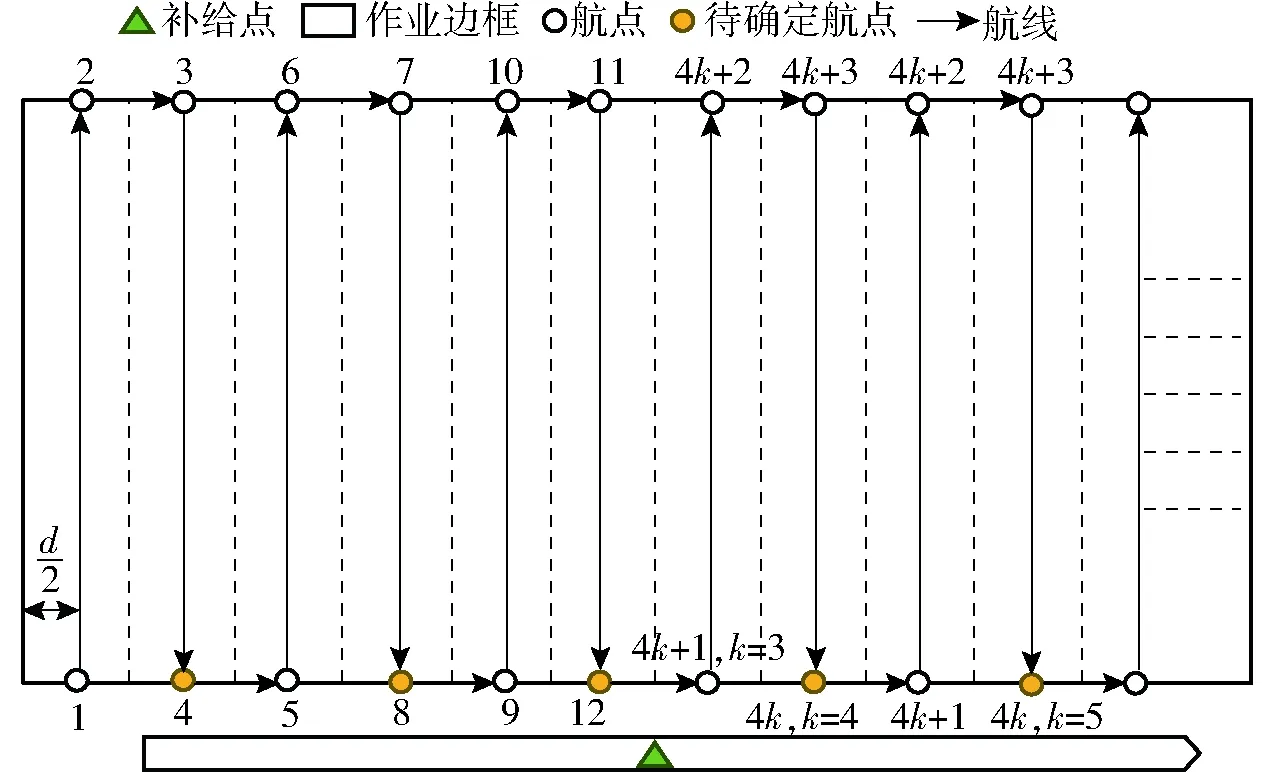
图9 无人机飞行航点分布图Fig.9 Distribution map of UAV flying points
无人机到达待确定返航点时剩余能量不足以完成下一次的飞行作业往返航程时,该待确定返航点即为返航点。因此,从待确定返航点中选择第1个返航点需要满足的条件为:
条件② 2k(l+d)-d≤Hp(k>1)
条件③Hp≤2(k+1)(l+d)-d
条件④Hb≤Hy
式中Hy——无人机到返航点后剩余能量下的航程
Hb——从返航点到补给点的航程
其中2(k+1)(l+d)-d为无人机飞到第k+1个待确定返航点时已经飞过的航程。
当条件①不成立时无需返航,当条件①成立时,只需判断条件②、③、④;第j个返航点为第4kj个航点。假设k=2时满足条件,4k=8,即第8个航点为第1个返航点,依次类推,第2个返航点为第16个航点,第j个返航点为第8j个航点。
返航点选取完毕后,结合现实作业情况,设田埂宽度为BT,求得第n个补给点B的坐标应为

将补给点坐标与返航点坐标转换为大地坐标,并连接返航点与补给点构成航线,如图10所示,即为最优航线。
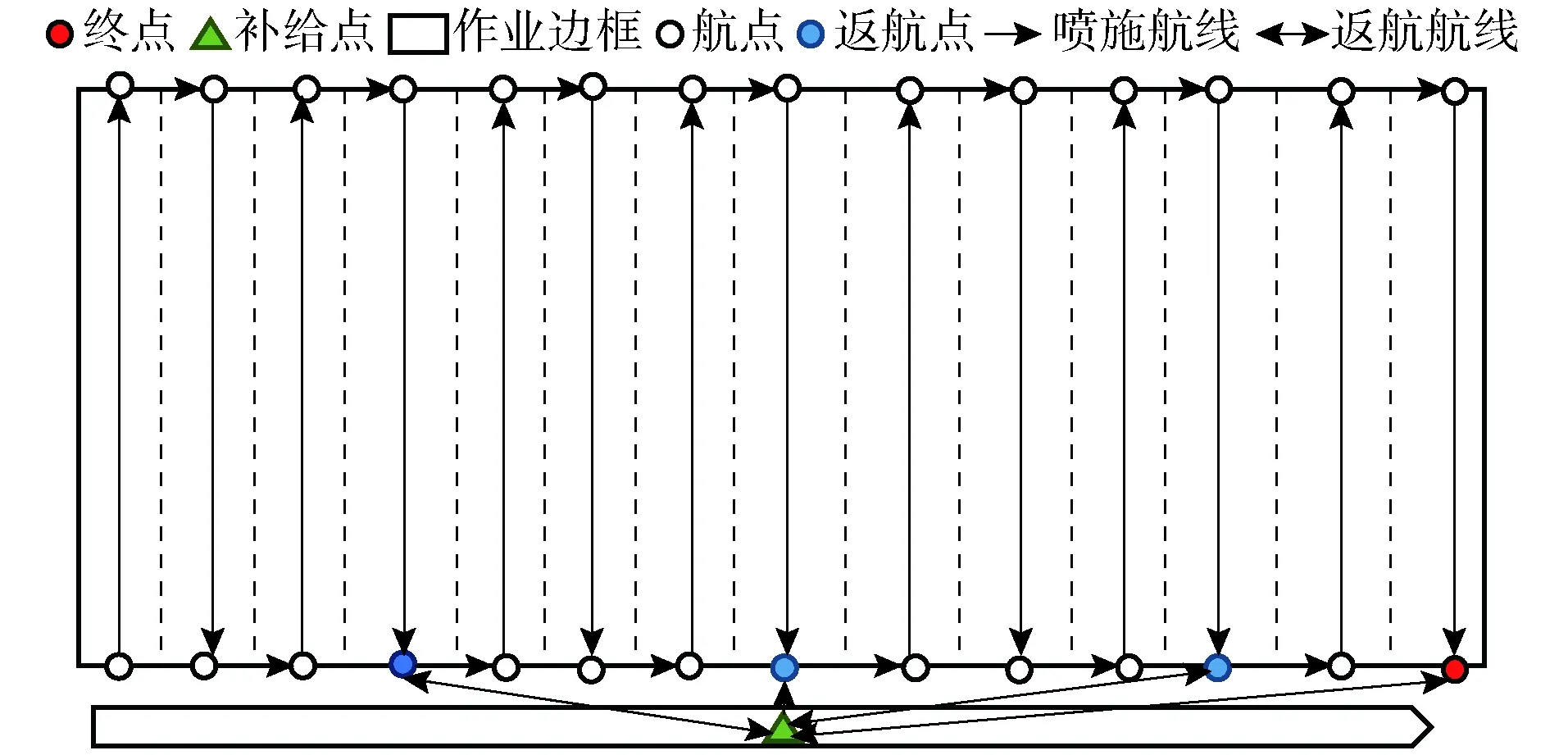
图10 规划后的作业航线有齿Fig.10 Operating channel after planning
2.3 基于最短航线的载荷分配
航线规划算法保证了无人机作业总航程H最短,在此基础上,先在喷施作业前根据病虫害严重程度设置每公顷喷施量,根据每公顷喷施量设置喷施流量及飞行作业速度。当农田面积及喷药总量确定后,根据式(2)便可计算出无人机的飞行作业架次j。通过条件①~④找出所有的返航点后,再根据飞行作业架次j和喷施流量L计算出每一架次作业有效载荷Z,该载荷恰好能使无人机作业到返航点时消耗完毕,让无人机空载飞回补给点,通过减少无人机无效载荷来进一步降低无人机作业能耗,提高续航时长。
(3)
式中Q——喷施流量
Hd——前j-1次单架次作业航程
v——作业速度
当作业航程H并不一定为无人机满载单架次最大喷施航程Hp的整数倍时,为保证作业航程能够精确覆盖作业区域,单独计算第j架次作业航程以确定其有效载荷。
2.4 基于能量预警的安全作业
电动植保无人机基本都使用可充电的锂电池,而锂电池电压降到预设的电压值时,就会停止供电,导致无人机突然降落甚至坠机。因此,为保障植保无人机田间安全作业,本文设计了能量预警算法,预先计算出无人机单架次作业所需总能量,并与无人机剩余能量比较,如果剩余能量小于所需能量,则拒绝起飞并提醒用户充电或更换电池。
无人机按照携带载荷喷施作业,空载返航到补给点,再携带载荷从补给点飞到下一航点开始喷施作业的循环方式作业,喷施作业时单位时间内无人机的电机功率、功耗不断变化。因此,无人机作业安全条件为剩余电量大于下一架次作业功耗加上空载返航功耗。根据上述安全条件,通过图11的规划流程图,得出是否进行能量预警的条件为
(4)
式中Cj——第n-1架次降落后剩余电量
S——下一个返航点到补给点的航程
Ck&b——n-1架次到达补给点剩余电量
tk&b——n-1架次空载飞回补给点的时间
Ck——n-1架次空载剩余电量
CP——实时记录下单位时间的平均耗电量
tp——n架次喷施所需时间

图11 能量预警规划流程图Fig.11 Process of energy early warning
3 仿真
为验证航线规划算法及有效载荷算法均能达到节省能量的目的,本次仿真分为两次进行,先独立验证航线规划算法在航线上节省能耗的程度,再在航线规划算法的基础上结合有效载荷算法进行仿真,验证组合算法在对航线及载荷的规划上对无人机作业过程的能量优化。
由于无人机作业能耗受到无人机载荷、飞行航程及飞行速度的影响,而且能耗受到作业环境因素影响,比如风速等,能量预警仿真的效果与实际作业效果差距较大,因此能量预警规划算法的仿真改成田间试验。
3.1 基于航线规划算法的能量节省率
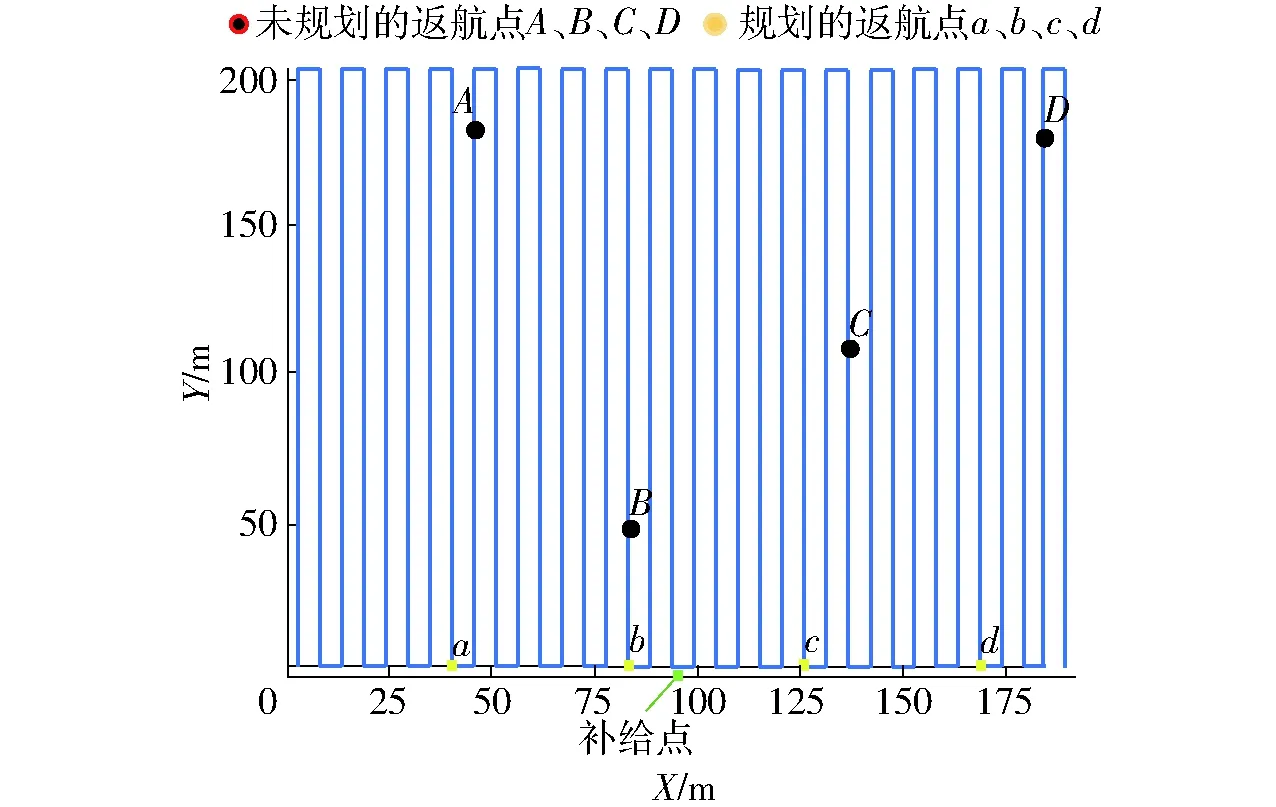
图12 航线规划仿真图Fig.12 Simulation diagram of route planning
选取190 m×200 m的一块矩形大面积区域作为无人机的喷施作业区域,喷幅宽度d=5 m,无人机总喷施航程H=7 785 m,设无人机作业速度为4 m/s,药箱总容量为10 L,喷施流量为1 250 mL/min,单架次作业满载药液能喷施1 920 m,最少作业架次为5个。航线规划仿真结果如图12所示,返航点与补给点的连线为规划后的返航航线,通过计算,采用喷完即返航方式所需要的总返航航程为1 425.08 m,通过航线规划算法得到的总返航航程为160.3 m。
仿真结果(航线规划结果)如表1所示,能量节省率计算公式为

(5)
式中 (xi,yi)——以药液耗尽为返航条件得到的第i个返航点坐标
(xj,yj)——航线规划算法得到的第j个返航点坐标
计算出能量节省率λ=16.25%。
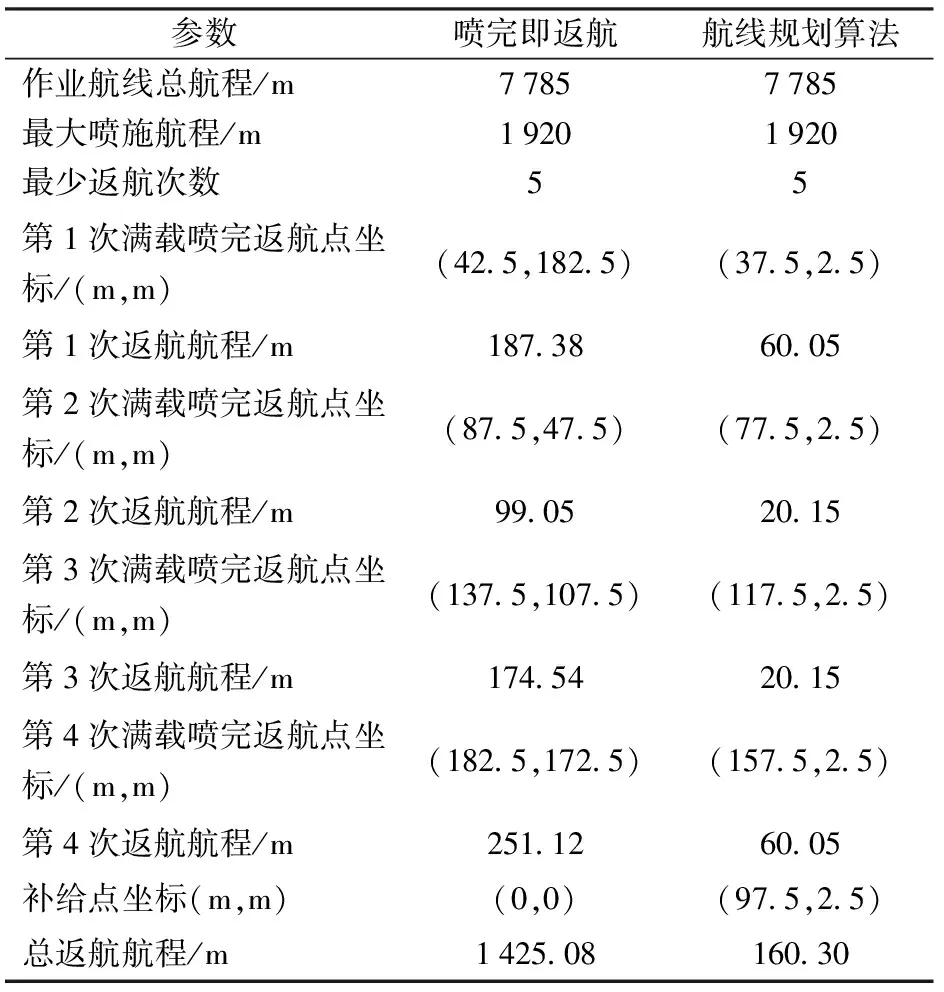
表1 航线规划结果Tab.1 Result of route planning
3.2 基于组合算法的能量节省率
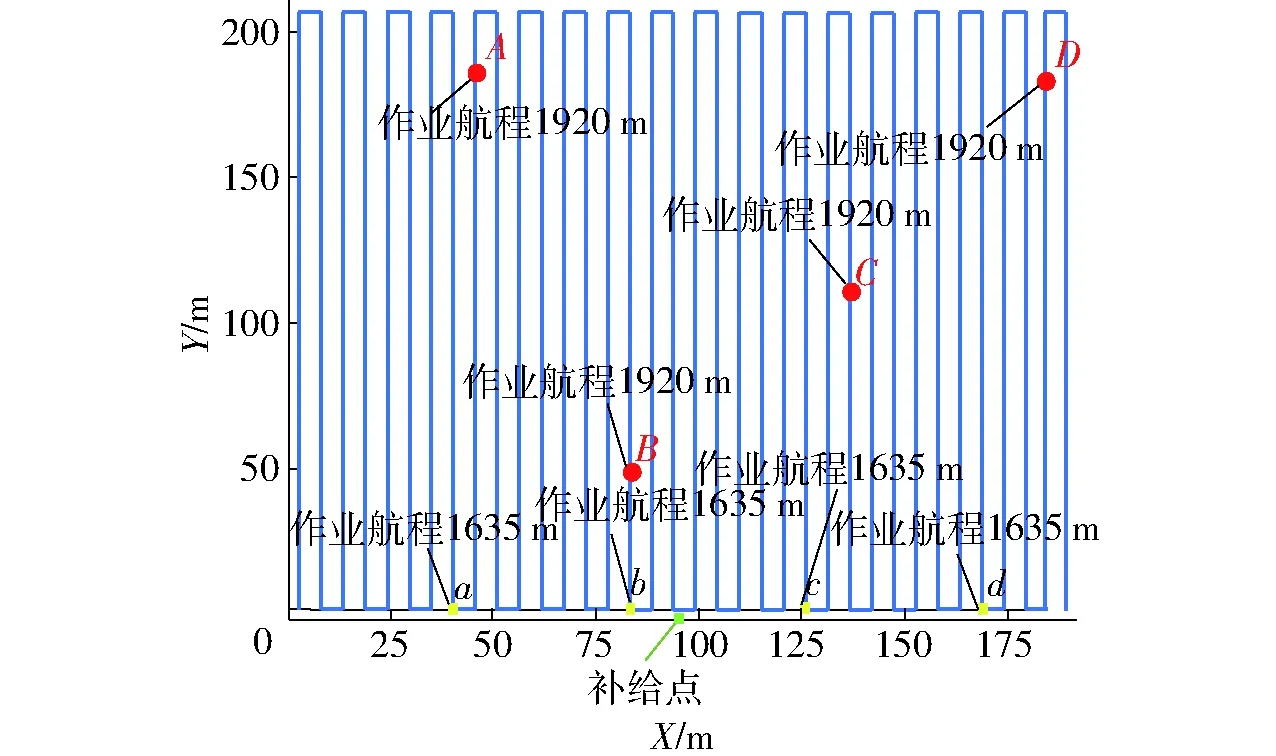
图13 有效载荷仿真图Fig.13 Simulation map of payload
在相同仿真区域数据下,基于航线规划算法进行有效载荷算法的仿真。有效载荷仿真结果如图13所示。采用满载起飞作业喷完载荷即返航的作业航程(喷施作业航程,下同)为1 920 m,载荷为10 L,而采用航线规划算法得到的作业航程为1 635 m,最后架次的作业航程为1 245 m,根据无人机作业速度可以计算出无人机前4个架次作业时间为408.75 s,第5架次作业时间为311.25 s,由喷施流量为20.83 mL/s计算出前4个作业架次的有效载荷为8.514 L,第5架次有效载荷为6.483 L。
仿真结果如表2所示,在作业航线总航程为7 785 m,最大喷施航程为1 920 m,最少返航次数为5次的情况下,组合算法能够节省9.461 L载荷。如果仅考虑载荷与能耗成正比的关系,则计算公式为
(6)
式中X——无人机最大载荷
Y——算法规划后的单架次作业有效载荷
Yj——算法规划出的第j作业架次有效载荷
计算出能量节省率λ=18.92%。

表2 有效载荷仿真结果Tab.2 Result of payload simulation
4 田间试验
根据试验内容及方法,使用如图14所示的无人机喷施规划地面站规划喷施作业路线,分别进行了两组室外试验,一组验证航线规划及有效载荷规划的组合算法,另一组独立验证能量预警规划。
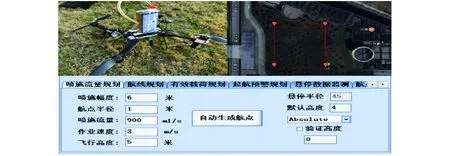
图14 试验无人机、作业区域及地面站软件界面Fig.14 Test UAV, working area and interface of ground control station software
4.1 航线规划及有效载荷规划
为验证组合算法规划与常规的作业规划相较得出的能量节省程度,如图14右上所示在华南农业大学荷园(113.373 597° E,23.166 708° N)旁的空地上选取一块矩形作业区域,测得平面坐标。使用的作业无人机如图14左上所示,作业主要参数如表3所示。进行两次飞行作业试验,第1次试验是采用航线规划算法和有效载荷算法规划了航线和载荷的喷施作业试验,第2次试验为无人机满载起飞喷施完载荷即返航的喷施作业试验,通过实际试验数据论证组合算法的能量优化效果。作业过程中无人机往返田间所飞行的航线称为返航航线。
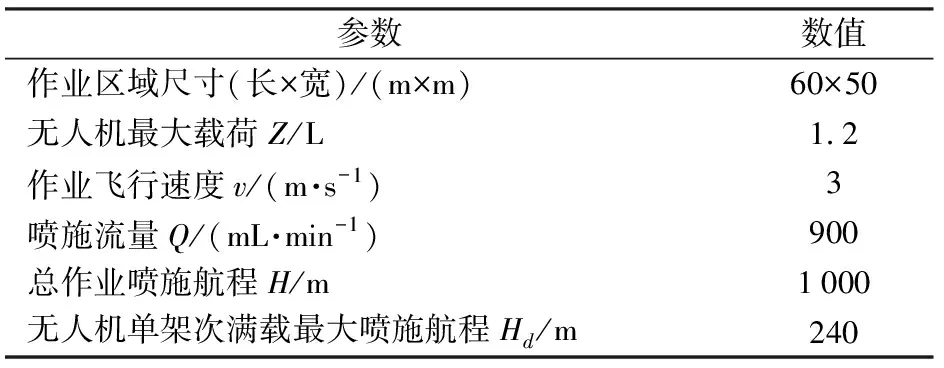
表3 试验区域作业参数Tab.3 Working parameters of testing area
由航线规划算法规划得单架次喷施航程为200 m,根据900 mL/min的喷施流量,由有效载荷算法规划出单架次作业的最佳载荷为1 000 mL,经计算得j=5个架次完成作业区域的喷施任务,因此航线规划时需要设置4个返航点,经过航线规划和不经过航线规划所得返航点平面坐标如表4所示。
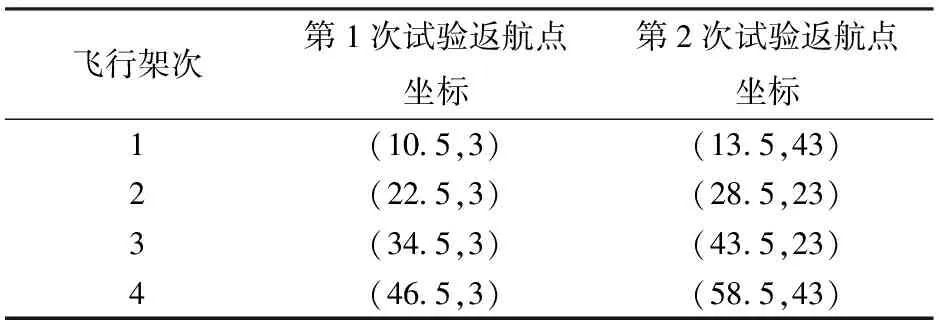
表4 返航点平面直角坐标Tab.4 Plane rectangular coordinates of return point (m,m)
如图15所示,通过无人机喷施规划地面控制站将算法结果转换为无人机飞行航线。
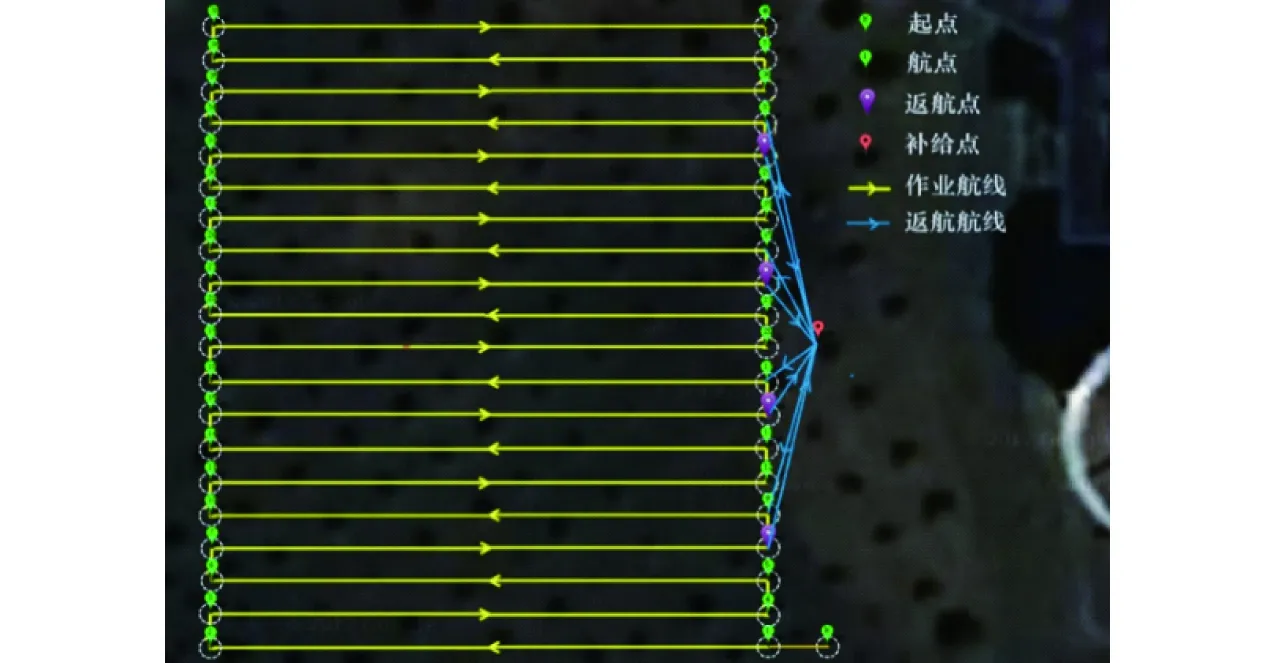
图15 无人机飞行航线生成图Fig.15 Generation map of UAV flying route
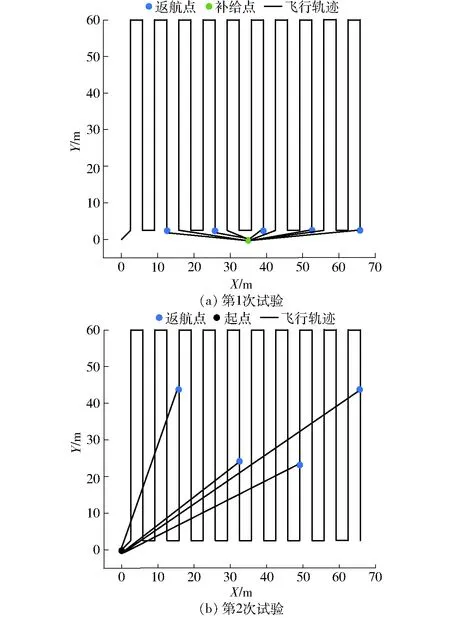
图16 无人机作业飞行轨迹Fig.16 Flight trajectory of UAV
第1次试验的航线规划如图16a所示,蓝点为返航点,绿点为补给点。无人机在实际喷施作业过程中,只在纵向航线上进行喷施作业,因此当无人机补给完成后,是从补给点飞到返航点的相邻下一纵向航线的端点,则返航点、补给点及下一航点的3点连线段即为单架次的返航航线。单架次作业结束后从返航点飞至补给点时,再按照地面站规划得出的有效载荷提示,重新为无人机装上载荷继续作业,直至完成整个作业区域的喷施任务。试验结果如表5所示。无人机总返航航程为110.4 m,总载荷为5 L。
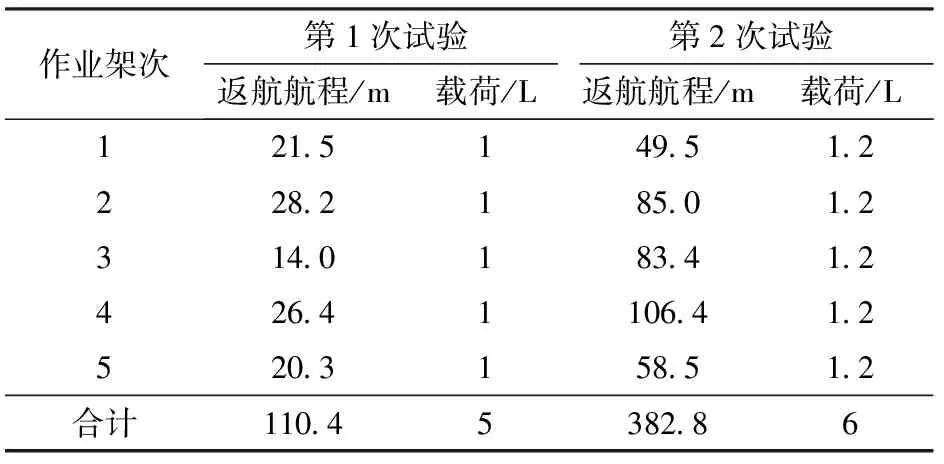
表5 航线及有效载荷规划数值结果Tab.5 Numerical result of flying route and payload
第2次试验,即对照试验的飞行航线和载荷未经算法规划,无人机满载起飞作业,当载荷耗尽后立即返航,补满载荷后返回上一架次的返航点继续作业。如图16b所示,蓝点为返航点,黑点为起点,往返线段为返航路线,试验结果如表5所示,未采用算法规划的作业方式所需要飞行的返航航程为382.8 m,总载荷为6 L。
通过两次试验的试验数据进行对比,可得出以下结论:经过算法规划的作业比未经算法规划的作业节省了272.5 m返航航程,航程节省率为23.7%;节省载荷1 L,载荷节省率为16.7%。再次证明了本算法能够最大程度降低无人机能量及载荷的消耗,具有高度的可行性及有效性。
为了与前文中航线规划仿真方式相对应,本次试验同样不将作业结束点到补给点的航程数据纳入计算。
4.2 能量预警规划试验
在航线规划和载荷规划的基础上,在相同试验条件下进行能量预警规划试验,对能量预警规划的原理及可行性进行验证。
为无人机重新安装一块已确保为满电的电池组(2 600 mA·h),电池组由6块电压为4.2 V单电池串联组成,满电时总电压为25.2 V,截止电压为不低于19.2 V/整组。无人机按照规划后的航线及载荷起飞作业,飞完一个架次时,补充载荷继续作业,当地面控制站能量预警规划模块提示能量不足,不允许起飞作业时,记录下累计作业时间、实时电压、单位时间内平均功率(实时功率累加后除以累计时间)P1及剩余电量,试验记录的数据如表6所示。
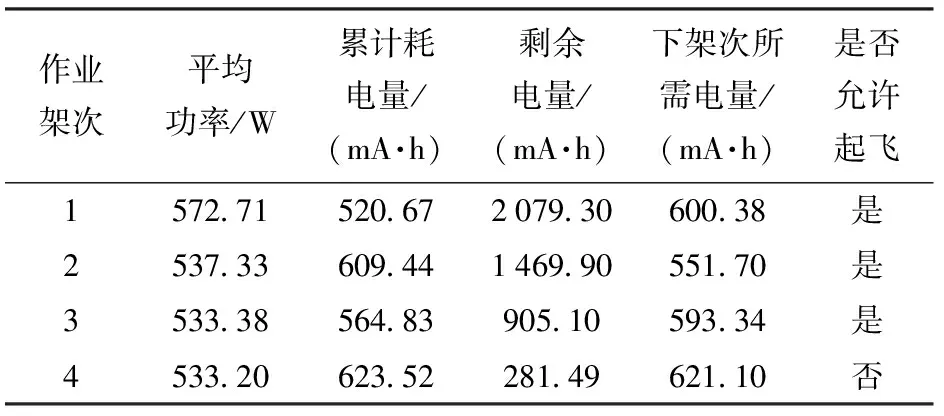
表6 各架次能量预警规划参数Tab.6 Parameter value of sorties energy early warning
能量预警规划算法是将无人机剩余能量与地面站记录的上一架次所需总能量进行比较,因此理论上能量预警规划试验应当让能量预警下的无人机继续携带载荷飞行以验证可行性,但是为了避免无人机从高空坠毁,将无人机悬停在离地面10 cm处进行悬停,记录相关数据。实时电压低至19.2 V时,将无人机降落并记录悬停时间tx、悬停平均功率P2及悬停耗电量,试验记录的数据如表7所示。无人机电池在悬停时的平均放电功率为450.51 W,小于无人机喷施作业时的平均放电功率;无人机悬停时间26.70 s。采用较喷施功率小的悬停功率对无人机剩余电量能够支持的作业航程H1进行计算。
H1=vtx
(7)
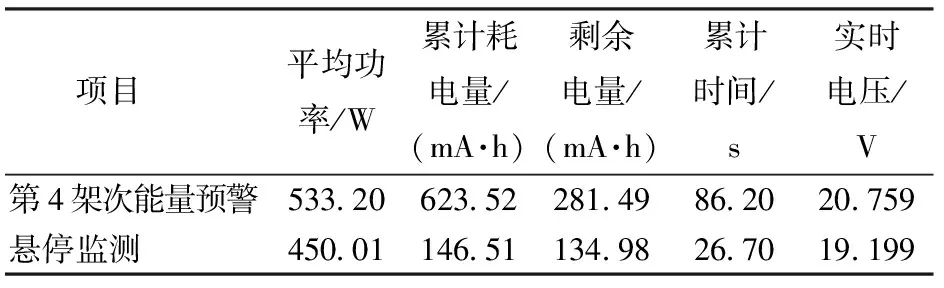
表7 无人机能量预警模块数据及悬停能耗数据Tab.7 Data of UAV energy early warning and hovering
利用式(7)得H1为80.1 m,与下一架次作业航程H2作对比,得H1≤80.1 m (1)作业区域全覆盖航线的预设使用栅格法对工作区域进行划分,并根据作业区域的规则程度和无人机信息设置航点,连成飞行航线。沿途设置补给点可有效减少无人机的返航航线,从而降低无人机能耗,根据补给点及返航点之间的返航路线最短原则,在生成航点上选取无人机的返航点,由此获得无人机最短航程。通过在地面站仿真得出,采用喷完即返航方式所需要的总返航航程为1 425.08 m,通过航线规划算法得到的总返航航程为160.3 m,航线规划能量节省率为16.25%。田间试验对比得出,经过航线规划的作业比未经规划的作业节省了272.5 m的返航航程,航程节省率为23.7%。 (2)在最短航程的基础上,为避免无人机返航时仍携带载荷,产生无谓能耗,结合喷施量和作业架次,对每架次无人机的有效载荷进行规划,使无人机空载返航,以降低能耗。仿真采用有效载荷规划后节省载荷9.461 L,能量节省率为18.92%,证明了无人机喷施规划组合算法的可行性。田间试验对比得出,基于航线规划的有效载荷规划作业比未经算法规划的作业节省载荷1 L,载荷节省率为16.7%。 (3)为了保证无人机田间安全作业,根据无人机作业时数据变化计算出每一架次所需总能量,并在每次返航时获取无人机剩余能量,将两者进行比较,如无人机剩余能量不足以支持下一架次作业,则进行能量预警,拒绝起飞的同时提醒用户充电或更换电池。进行田间试验验证能量预警规划,在地面站软件发出能量预警时,通过无人机悬停时间和作业速度计算得出的无人机剩余作业航程小于下一架次作业航程,因此无人机继续作业,中途可能会发生迫降或坠机。由此证明能量预警算法是可行的。5 结论
猜你喜欢
小哥白尼(军事科学)(2022年7期)2022-09-20
军民两用技术与产品(2022年1期)2022-06-01
军民两用技术与产品(2021年12期)2021-03-09
小哥白尼(神奇星球)(2021年12期)2021-03-08
航天工业管理(2020年3期)2020-07-25
太空探索(2020年5期)2020-05-19
海峡姐妹(2019年5期)2019-06-18
百科探秘·航空航天(2017年12期)2018-01-31
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
