混合动力汽车分离离合器故障诊断测试技术研究
2019-10-24 06:46赵德银许中芳王伟东高艳高奥
汽车文摘 2019年11期
赵德银 许中芳 王伟东 高艳 高奥
(中国第一汽车股份有限公司 智能网联开发院,长春 130013)
主题词:P2构型 混合动力车 分离离合器 故障诊断
1 前言
当前全球正面临着日益加剧的环境污染和逐渐耗尽的能源危机,而燃油汽车是二氧化碳排放和石油消耗的主要贡献者,必须对其进行变革以减轻环境和能源问题。目前新能源汽车发展已在全球形成共识,包括插电式混合动力、纯电动、燃料电池技术将是新能源汽车的主要技术方向。
采用P2构型的混合动力车,动力系统搭载了发动机和电机,发动机和电机之间通过分离离合器连接。根据不同的行驶工况,在整车控制器HCU的控制下,通过电磁阀的开启或关闭,及通过压力传感器实时获取分离离合器结合压力,以精确控制分离离合器的结合或分离状态,使整车处于纯电动、发动机单独驱动、联合驱动、怠速发电、行车发电等不同的行驶模式。由分离离合器、电磁阀、压力传感器及HCU构成的分离离合器系统对整车行驶的安全舒适非常重要,因此对分离离合器的故障诊断也很重要。在分离离合器系统出现故障时,HCU必须能及时检测到故障情况,并对故障做出合理、有效的反应。
本文针对分离离合器系统故障情况进行分析,编写测试大纲,并在整车HIL(Hardware In Loop)测试系统上搭建自动化测试序列,实现了对分离离合器系统故障诊断的自动化测试,以检测在分离离合器系统出现故障时,HCU对故障情况的诊断功能及故障情况下控制功能是否合理。
2 P2构型及分离离合器系统结构
基于P2构型的混合动力车架构如图1所示。
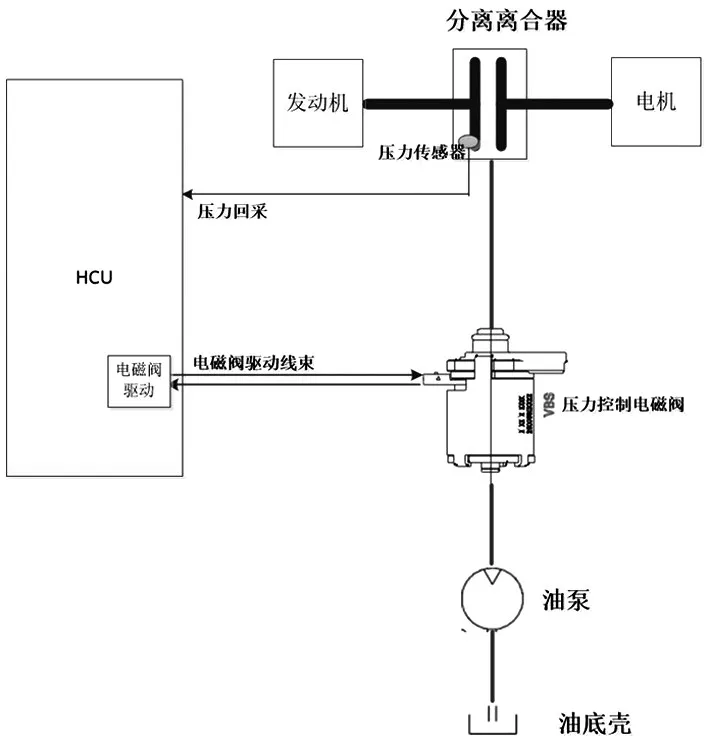
图1 P2构型混合动力车架构
分离离合器系统结构如下图2所示,由压力控制电磁阀、分离离合器、压力传感器及整车控制器HCU组成。压力控制电磁阀的输入油源来自于油泵的输出油压。电磁阀在HCU的电流控制下,通过阀芯的打开或关闭,使油泵的油压进入或离开分离离合器,进而控制分离离合器结合或分离。分离离合器中的压力传感器将离合器结合压力实时传递给HCU,以便HCU能通过反馈压力做到对离合器结合程度的精确控制。
图2 分离离合器系统结构示意
3 分离离合器系统故障诊断测试
3.1 测试环境
分离离合器系统故障诊断测试基于整车HIL测试系统进行。该系统软件部分包含动力电池模型、电机模型、离合器模型、发动机模型、变速器模型及车辆动力学实时仿真模型。实时硬件在回路系统由实时处理器、输入输出通道、信号调理、故障注入、真实/仿真负载组成。通过上位机的控制,可以实现模型下载、自动化测试、数据采集及保存。
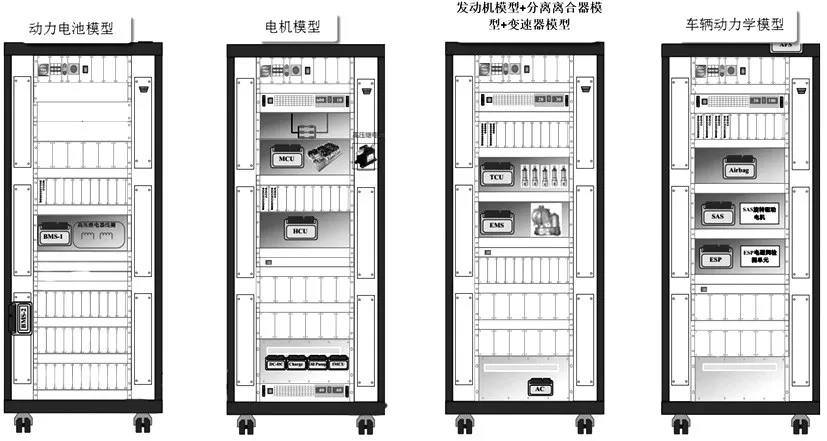
图3 整车HIL测试系统
3.2 测试系统设计
在P2构型的混合动力车中,分离离合器连接着发动机和电机,起着动力系统扭矩耦合和分离的作用,实现了混合动力车各种行驶模式。在分离离合器系统中,电磁阀驱动线路故障、压力传感器偏移故障、压力传感器线路故障及分离离合器自身故障,都会影响分离离合器的结合或分离,进而对整车的行驶状态及行驶安全带来影响。作为分离离合器系统的控制者,HCU必须能及时诊断出这些故障,并对故障做出及时、正确、有效的反应(比如:关闭电磁阀、起动或停止发动机),以保证车辆处于安全、可控的状态中。
针对分离离合器系统中各个故障点,明确测试对象和测试目的,设计分离离合器系统故障诊断测试大纲,如下表1所示。

表1 分离离合器系统故障诊断测试大纲
3.3 测试实施
基于分离离合器系统测试大纲,编写测试用例,搭建自动化测试序列,完成批量运行主程序、数据字典、测试参数集和测试框架的构建,如下图4所示。在自动化测试过程中,自动化测试序列自动调用测试参数,完成分离离合器系统的自动化批量测试。

图4 测试实施
3.4 数据处理
在自动化测试过程中,会产生大量的测试数据,本文采用Python脚本语言编写数据批处理软件,将测试过程中采集的数据转换为MATLAB格式,并将该数据与总线信号进行同进步、合并,对合并后的数据进行提取、分析。
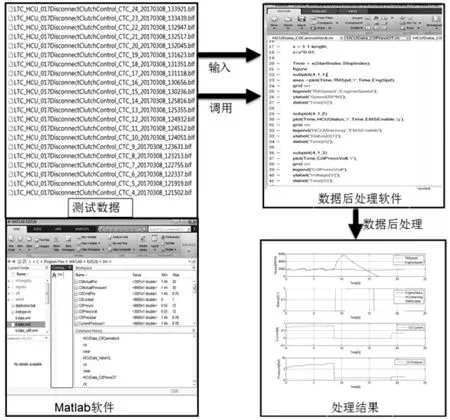
图5 测试结果分析
4 典型工况测试结果分析
4.1 电磁阀驱动线路高端对电源短路故障
在车辆纯电动模式行驶过程中,电机驱动车辆行驶,发动机停机,电磁阀驱动电流较小,分离离合器处于分离状态。测试结果表明:在电磁阀驱动线路高端对电源短路时,电磁阀流过的驱动电流最大(如图6,最大达到2 A),电磁阀全开,油泵通过电磁阀输出压力使分离离合器意外结合,发动机被电机拖动转动。HCU通过发动机转速检测到发动机意外转动,并通过电磁阀驱动芯片检测到驱动线束故障。为了行驶的安全性及车辆可控性,HCU向驾驶员发送报警信息,同时关闭电磁阀低端驱动,使电磁阀驱动电流减小到为0 A,电磁阀关闭,使流过电磁阀的压力减小,分离离合器分离,发动机转速下降,车辆进入纯电动跛行。在此行驶工况下,HCU能及时检测到故障情况,并对故障做出处理,进而保证车辆安全、可靠的行驶。

图6 电磁阀驱动线路高端对电源短路故障测试结果
4.2 电磁阀驱动线路开路故障
在车辆混动模式行驶过程中,由发动机和电机联合驱动车辆行驶,电磁阀驱动电流较大,分离离合器处于结合状态。测试结果表明:在电磁阀驱动线路开路时,电磁阀流过的驱动电流最小(如图7,电流减小到0 A),电磁阀全关,油泵输出油压不能通过电磁阀进入分离离合器,使分离离合器意外分离,发动机突然失去负载导致发动机转速升高。HCU通过电机转速和发动机转速检测到分离离合器意外分离,并通过电磁阀驱动芯片检测到驱动线束故障。为了行驶的安全,避免发动机无意义工作,HCU向驾驶员发送报警信息,发送发动机停机命令,车辆进入纯电动跛行。在此行驶工况下,HCU对故障检测不够及时,导致发动机转速增加较多时,才发送发动机停机命令,整车舒适性、经济性不好。
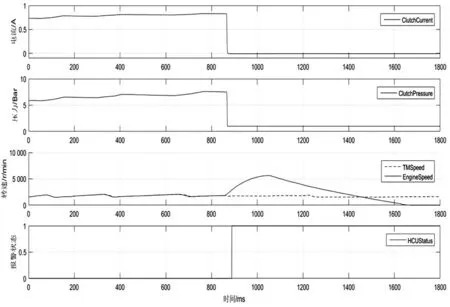
图7 电磁阀驱动线路开路故障测试结果
4.3 分离离合器自身故障测试
在车辆纯电动模式行驶过程中,电机驱动车辆行驶,发动机停机,电磁阀驱动电流较小,分离离合器处于分离状态。测试结果表明(图8):HCU在行驶过程中通过电机起动发动机时,HCU会先增大电磁阀电流,使分离离合器压力增大,由电机将发动机拖动起动。由于分离离合器存在不能结合故障,即使分离离合器压力增大,发动机不能被拖动转动。HCU通过电机转速和发动机转速检测到分离离合器结合失败。为了避免发动机无意义工作,HCU向驾驶员发送报警信息,同时停止起动发动机,车辆进入纯电动跛行状态。HCU在此行驶工况下,对故障检测比较及时,其故障处理也是安全、可靠的。

图8 离合器本体故障测试结果
4.4 压力传感器线路故障
在车辆混动模式行驶过程中,由发动机和电机联合驱动车辆行驶,电磁阀驱动电流较大,分离离合器处于结合状态。测试结果表明(图9):在压力传感器线路出现对电源短路故障时,HCU检测到压力传感器输出信号电压较大,此时HCU无法通过压力传感器实时获取离合器结合压力真实值。为了行驶的安全及离合器控制的精准,提高整车舒适性和安全性,HCU发送发动机停机命令,车辆进入纯电动跛行模式。

图9 压力传感器线路故障测试结果
4.5 压力传感器偏移故障
在车辆混动模式行驶过程中,由发动机和电机联合驱动车辆行驶,分离离合器处于结合状态。测试结果表明(图10):在压力传感器出现偏移故障时,HCU检测到当前实际压力与期望压力偏差较大,此时HCU无法通过压力传感器实时获取离合器结合压力真实值。为了行驶的安全及离合器控制的精准,提高整车舒适性和安全性,HCU发送发动机停机命令,车辆进入纯电动跛行模式。

图10 压力传感器偏移故障测试结果
5 总结
针对P2构型混合动力车分离离合器系统结构、故障情况及故障结果进行分析,并根据故障情况进行针对性测试,以检测HCU在故障发生时的故障检测功能及故障控制功能是否合理、可靠。在自动化测试平台上,采用测试参数和测试序列分离设计技术,实现了自动化批量测试,同时采用数据批量处理技术,实现了对分离离合器系统故障情况的快速测试、验证,达到了很好的测试效果,降低了测试成本,缩短了验证周期,提高了HCU的功能品质。
猜你喜欢
猪业科学(2022年8期)2022-09-09
汽车实用技术(2022年16期)2022-08-31
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
科学导报·科学工程与电力(2019年7期)2019-09-10
股市动态分析(2015年24期)2015-09-10