
一种快速响应的高精度滚转角解算模块
2019-10-18 07:52郭兴玲
测试技术学报 2019年5期
郭兴玲,袁 靖
(北京中石正旗技术有限公司,北京 100176)
目前滚转角解算模块在炮弹、火箭弹制导中有大量的需求与应用,如捷联惯导系统滚转角解算模块、二维磁阻滚转角解算模块、磁力计和加速度计组合的滚转角解算模块等,这些模块有的成本高,有的抗过载能力差,有的累积误差大.基于三轴巨磁阻抗效应非晶丝磁传感器具有响应速度快、灵敏度高、成本低、迟滞小的特点,结合基于三轴磁传感器输出的滚转角算法和高速芯片实现一种快速响应的低成本的滚转角解算模块[1-5].
1 基于三轴巨磁阻抗效应非晶丝磁传感器的滚转角解算模块
基于三轴巨磁阻抗效应非晶丝磁传感器的滚转角解算模块工作原理如图1所示,主要包含三轴巨磁阻抗效应非晶丝磁传感器、信号采集滚转角解算模块和数据存储传输模块.

图1 滚转角解算模块工作原理图
1.1三轴巨磁阻抗效应非晶丝磁传感器
1.1.1 传感器电路
非晶丝在高频脉冲激励下,当外界有微弱磁信号时,非晶丝的阻抗会发生巨大变化,系统感应外界微弱磁信号,输出对应于外界微弱磁场的电信号.其电路组成为:激励电路、信号采集电路、敏感探头、放大电路、检波电路、滤波电路及反馈电路.其中:激励电路给非晶丝提供高频脉冲信号;信号采集电路通过感应线圈感应信号;放大电路将感应信号进行放大;检波电路从高频调幅波中检测出所需的调制信号;滤波电路低通滤波,去除感应信号中较强高次谐波和噪声;反馈电路扩大测量范围,把信号特性死区部分强制偏移到线性区进行准确测量,将信号饱和区强制到线性区进行准确测量.
基于非晶丝的工作机理是:要有一个高频信号对材料进行激励,采用尖窄脉冲激励,其具有较强的谐波信号,非晶丝对高次谐波频率响应更灵敏,这样可以提高传感器的灵敏度.在脉冲激励作用下,载波峰值会随外加磁场的变化而变化,通过采集线圈采集到非晶丝变化的电压即可求得变化磁场的大小.
电路选用二极管检波方式,通过AD8421将传感器信号放大.AD8421具有较低的输入电压噪声和功耗,因此选用AD8421作为信号放大器.
1.1.2 非晶丝探头
非晶丝探头是微磁传感器达到设计性能的关键因素之一.非晶丝探头基本组成形式为:非晶丝、感应线圈、偏置线圈,决定性能的有以下几个方面:① 探头的驱动方式;② 非晶丝的直径与长度;③ 感应和便置线圈的直径和绕制匝数.需要保证绕制线圈的均匀性;绕制线圈与非晶丝的同轴度.
为保证设计性能:①采用Co基非晶,其轴向各向异性的材料灵敏度高,在材料的易磁化方向施加驱动磁场可以产生较显著的磁阻抗变化,采用横向驱动-非对角方式:即在非晶丝上通电流,在绕制线圈上取感应电压.② 考虑到线圈绕制时对非晶丝的应力影响,采用非金属支撑管作为线圈绕制的支撑体,非晶丝穿过非金属支撑管.③ 根据微磁传感器的性能、成本和体积大小确定非晶丝的长度:长度越短,功耗越低,灵敏度越高.根据微磁传感器的灵敏度、工作量程确定感应线圈的匝数;根据微磁传感器的工作线性区间确定偏置线圈的匝数.
采用1 mm长度,直径25 μm的非晶丝,绕制线圈采用直径25 μm的铜漆包线,非晶丝外绕制两层漆包线线圈,一层为感应线圈(300匝),一层为偏置线圈(100匝).
1.1.3 传感器实验测试数据
传感器实验设计实物如图2所示,量程±2 Gs,分辨率2 nT,灵敏度1 608 mV/Gs,线性度1%FS,迟滞性0.5%FS,重复性1%FS,工作电流8 mA,图3 给出了在±0.38 Gs工作区间传感器测试工作曲线.

图2 三轴非晶丝磁传感器电路实物图

图3 传感器工作曲线图
2 数据采集和滚转角解算MCU电路模块
数据采集和滚转角解算MCU电路模块如图4所示,该电路模块主要解决数据的高速采样和处理,采用STM32F765VI芯片实现三轴磁传感器数据的200 MHz高速采样,并完成滚转角的解算.

图4 数据采集和滚转角解算MCU电路模块
3 基于非晶丝磁传感器的弹体实时姿态角计算方案
3.1 非晶丝磁传感器测量数据的修正与补偿
传感器测量数据的修正主要从3个方面进行:①正交修正;②零点修正;③灵敏度修正.这里阐述实验测试中的一种数据修正方法.3个敏感轴的灵敏度不一致时,会产生灵敏度误差,输出的曲线是一个椭圆,需要进行灵敏度校正.
在无环境干扰情况下对磁传感器自身误差进行校正:
设3个轴的灵敏度误差为(KX,KY,KZ),偏置误差为(X0,Y0,Z0),设传感器输出值与所在磁场的关系为
(1)
式中:Xout,Yout,Zout分别为传感器3个轴的输出值,Bx,By,Bz为地磁在3个轴上的磁场值.
对传感器进行校准,让传感器的3个轴XYZ分别测量同一磁场(地磁场):
用三维转台将Z轴调节与地磁矢量B垂直(此时Z轴输出量最小);绕Z轴旋转一周,记录X轴和Y轴的数据,则X轴或Y轴在转动一周中,与B同向时取最大值;与B反向时取最小值.
Xmax=KX×Bx+X0,Xmin=-KX×Bx+X0.
(2)
推出
KX=(Xmax-Xmin)/(2×Bx),X0=(Xmax+Xmin)/2..
(3)
记录X轴的归一化系数,作为归一化处理参数,令
Ax=(Xmax-Xmin)/2,X0=(Xmax+Xmin)/2.
(4)
同理
Ay=(Ymax-Ymin)/2,Az=(Zmax-Zmin)/2,Y0=(Ymax+Ymin)/2,Z0=(Zmax+Zmin)/2.
(5)
当滚转角解算测量时,X,Y,Z轴输出第I时刻的值为Xi,Yi,Zi,作归一化处理计算
(6)

3.2 弹体实时姿态角计算
在已知发射坐标系下的地磁场矢量Hf=[XfYfZf]T和弹体坐标下的地磁场矢量Hb=[XbYbZb]T的情况下,滚转角的计算[6-10]如下.
如果已知俯仰角θ,那么滚转角γ和偏航角φ为
(7)
如果已知偏航角φ,那么俯仰角θ和滚转角γ为
(8)
式中:Hf,Hb分别为发射坐标系下和弹体坐标下的地磁场矢量;Xf,Yf,Zf表示发射坐标系下的3个坐标系的地磁场值;Xb,Yb,Zb表示弹体坐标系下的3个坐标系的地磁场值;θ,γ,φ分别为俯仰角,滚转角和偏航角.
4 实验测量与结果
设计的基于三轴巨磁阻抗效应非晶丝磁传感器的滚转角解算模块如图5所示.

图5 滚转角解算模块
图6 给出了基于三轴旋转平台,通过无线传输模块实时采集的三轴传感器数据和解算的滚转角曲线.图6 中从上往下依次为①X轴磁传感器输出数据;②Z轴磁传感器输出数据;③Y轴磁传感器输出数据; ④滚转角解算数据.
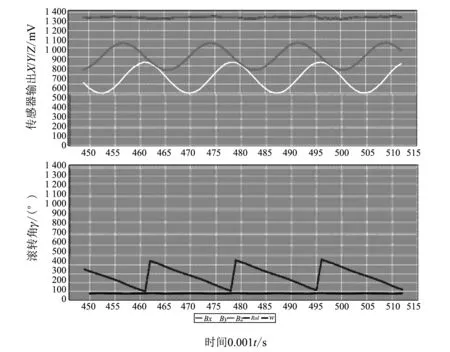
图6 滚转角实时测量数据曲线图
5 结 论
设计了一种由基于三轴巨磁阻抗效应非晶丝磁传感器、控制电路模块、结合滚转角解算算法形成的电路模块系统,实验结果表明:模块的滚转角解算速率为500 Hz,精度在0.9°左右.这种滚转角解算模块成本低,响应速度快,灵敏度高,可应用在姿态解算的炮弹、火箭弹制导等领域中.
猜你喜欢
大电机技术(2022年4期)2022-08-30
民族文汇(2022年14期)2022-05-10
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
装备制造技术(2020年12期)2020-05-22
模具制造(2019年10期)2020-01-06
模具制造(2019年7期)2019-09-25
解放军健康(2017年5期)2017-08-01
山东工业技术(2016年15期)2016-12-01
探测与控制学报(2015年4期)2015-12-15
中国科技信息(2015年21期)2015-11-07
