
基于模型的PI鲁棒控制的电子节气门方法研究
2019-10-18 07:26:42李学军于皓宇
测控技术 2019年9期
李学军,张 生,于皓宇
(1.长春大学电子信息工程学院,吉林长春 130022;2.长春大学研究生院,吉林长春 130022)
据研究表明,汽车发动机的进气量在一定程度上决定汽车排放空气污染物的量。研究电子节气门的控制方法对减少汽车污染物排放,改善汽车动力特性是非常有现实意义的。国内外学者也做了大量研究。
文献[1]采用前馈线性化与模糊自适应控制相结合的方法,该控制系统稳定性好、精度高。
文献[2]设计滑模控制器控制电子节气门,在闭合阶段,滑模控制几乎没有超调,且能快速准确地跟踪油门踏板的动作指令。
文献[3]利用反推法设计了一个非线性的电子节气门系统的控制规律。
文献[4]通过ISS相关的稳定性理论证明了控制系统的稳定性和鲁棒性,并用快速原型dispace验证了此方法的有效性。
Vasak等人基于精确的数学模型设计了带约束时间的最优控制器[5]。该方法与文献[6]、文献[7]的控制算法一样,高度依赖模型的精确度,当模型的参数发生微小摄动时,控制效果会急剧下降。
针对实际控制对象的参数摄动和外界干扰,本文设计了基于模型的电子节气门PI鲁棒控制器,该算法能较好地抑制由于参数摄动和干扰带来的影响,达到较好的控制效果。
1 电子节气门建模
1.1 直流电机的数学模型
电子节气门等效为直流电机,由基尔霍夫定律知电机回路方程和扭矩方程:

式中,Ra为电枢回路的等效电阻(Ω);ia为流入电机的电流(A);La为回路的等效电感(H);kv为电机反电动势常数(V/(rad·s)-1);T'm为电机输出扭矩(N·m);Tmf为摩擦扭矩(N·m);Jm为电机的转动惯量常数(kg·m2)。
忽略电机电感影响,方程(1)简化为

考虑实际电路中电机的驱动有

式中,u为输入电机的占空比;Vbat为汽车上的电瓶电压(V)。
由方程(2)~方程(4)得

1.2 减速齿轮组的数学模型
减速齿轮组输入是电机输出扭矩Tm(N·m)和电机转角θm(rad),输出是减速齿轮组扭矩Tg(N·m)和节气门转角θ(rad)(θ=1/n·θm)。忽略齿轮间隙影响,则有

式中,n为从电机与节气门阀片转角的比值;Tgf为摩擦而损失的扭矩(N·m);Jg为齿轮组的转动惯量(kg·m2)。
1.3 复位弹簧的数学模型
复位弹簧的扭矩特性对其做等效处理得到数学表达式为

式中,kpre为弹簧的预紧力矩系数(N·m);θ0为节气门静态时的开度(rad);ksa为θ≥θ0时弹簧的弹性系数(N·m/rad);ksb为 θ0>θ≥0 时弹簧的弹性系数(N·m/rad)。
1.4 节气门的数学模型
设节气门阀片稳定在一定的开度时,电子节气门达到平衡状态。因此有

式中,Jt为节气门体的转动惯量(kg·m2);Ttf为节气门在转动过程中损失的摩擦扭矩。将式(5)~式(7)代入式(10),整理得

式中,θp=转换为度数的系数。
参考文献[8],将摩擦力分解为库伦摩擦和滑动摩擦,则有
模型参数如表1所示。
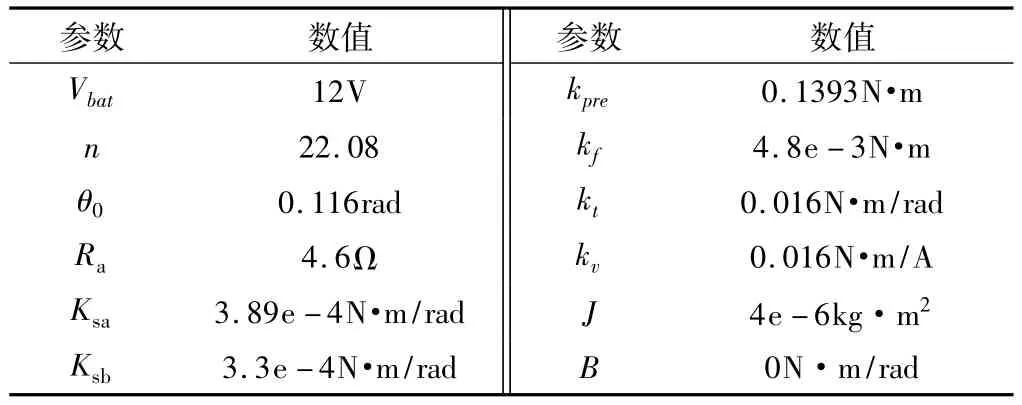
表1 模型参数
2 电子节气门控制器设计
针对电子节气门模型,假设xd是需要的理想位置,令e=xd-x1为电子节气门位置误差,则速度误差

推导出

控制律可以设计成

式中,Kp>0;Ki>0;um为基于模型的控制量;ur为鲁棒项。令

其中,
控制项ur=krsgn(ω)就是基于PI的鲁棒控制。这项使得节气门在用PI控制的同时,当节气门的参数发生变动时,控制器能做出调节来保持控制性能,因而棒项。
基于理想模型得出的控制律在实际系统使用中还需要考虑模型误差、测量反馈误差等。在补偿了非线性干扰项后,还要使节气门具有一定的鲁棒性。控制项ur=krsgn(ω)就是基于PI的鲁棒控制。这项使得节气门在用PI控制的同时,当节气门的参数发生变动时,控制器能调节系统保持控制性能,因而具有抗干扰能力。

3 仿真验证
实际的电子节气门都存在高频噪声,故取高频干扰量d=10sin(0.02t),设计的控制器参数为kp=15,ki=0.6,kr=50,Simulink 仿真图如图1 所示。

图1 基于模型的PI鲁棒控制仿真
实验1:设跟踪目标为10°~80°的大变差阶跃信号。仿真结果如图2所示。由图2可知,本文算法的鲁棒PI控制的平稳特性、跟踪特性和响应的快速性都较好。基于模型的PI鲁棒控制的调节时间为90ms;在阶跃变化处几乎能跟踪上理想曲线的变化,稳态误差在±2.5%以内。为说明本文算法的有效性,采用传统的PI控制器,在相同的P和I参数下出现了振荡,且超调量比较大。

图2 10°~80°正负阶跃响应
实验2:为了考查系统的角度分辨率,输入初值为10°,终值为10.2°的小偏差阶跃信号。仿真结果如图3所示。

图3 10°~10.2°的阶跃响应
仿真结果可知,本文算法能以较快的速度识别0.2°的角度变化并加以控制。单纯的PI控制器虽然能够识别控制0.2°的角度变化,但是调节时间过长。
实验3:通常情况下,驾驶员通过油门踏板向控制器输入频率在0~3 Hz范围内,取输入信号频率为1.5 Hz和3 Hz的位置跟踪信号xd=44sin(3πt)+50。仿真的结果如图4和图5所示。

图4 1.5 Hz正弦响应
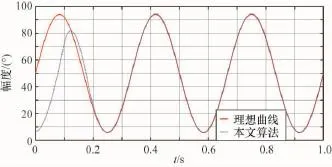
图5 3 Hz正弦响应
由图可知总体的控制性能并没有因为模型的精度误差而出现较大的差异。主要是基于模型PI鲁棒控制对于复杂的非线性采用建模补偿的方法得到补偿。由于鲁棒项的存在,在建模精度不是很高的条件下,也能保证有很好的控制性能。
4 结束语
由于模型补偿方法总是存在补偿过度和过少的问题,基于力学、物理学等建立的模型参数存在非线性。为了解决此类问题,本文设计了基于模型的PI鲁棒控制器,并给出了模型参数。通过搭建基于模型的PI鲁棒控制系统进行系统仿真实验,表明设计的控制系统在减小调节时间,抑制超调量等控制性能方面优于传统的PI系统,而且系统还具有很好的鲁棒性。
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
汽车维护与修理(2019年3期)2019-08-08 02:29:02
自动化学报(2019年6期)2019-07-23 01:18:22
天津教育·下(2018年9期)2018-07-13 08:25:47
汽车维护与修理(2018年19期)2018-04-28 01:21:40
厦门理工学院学报(2016年1期)2016-12-01 04:50:41
北京航空航天大学学报(2016年7期)2016-11-16 01:51:01
系统工程与电子技术(2016年4期)2016-08-24 07:46:18
汽车维修与保养(2015年1期)2015-04-17 03:25:34
汽车零部件(2014年5期)2014-11-11 12:24:30
