
基于改进型PI趋近律的无刷直流电机滑模控制
2019-10-18 07:26朱承平
测控技术 2019年9期
郭 伟,朱承平,李 涛,姜 睿
(1.江苏省大气环境与装备技术协同创新中心,江苏南京 210044;2.南京信息工程大学自动化学院,江苏南京 210044)
有刷直流电机(BDCM)相较于其他电机,本身就具有结构简单、效率高、调速能力好等优点。而无刷直流电机(BLDCM)则是以有刷直流电机理论为基础发展起来的一种改良过的电机[1]。因而,无刷直流电机不仅兼具了有刷直流电机的诸多优点,而且还消除了有刷电机成本高、运行寿命短、危险性高、维修困难等缺点。无刷直流电机的高性价比使其在工业控制、机床、航空等诸多领域有着广泛的应用。
过去,PID控制因为有着结构简单、易于实现等优点而被广泛运用于工业上[2]。但随着技术的发展,因为传统PID控制要求系统模型要有很高的精确度,但实际系统的模型参数由于受现实很多方面的影响和干扰,从而经常会出现偏差,所以传统的PID控制已不能满足工业发展的需求。因而,人们开始将目光放到其他的控制策略上,如神经网络控制、模糊控制、滑模控制等[3]。
滑模变结构控制的优势在于对系统模型的精确性没有要求,能够不受系统参数变化的影响,这就避免了实际工业生产干扰因素的影响。但由于滑模控制的抖振问题,使得滑模控制的现实应用存在很大的困难,所以目前滑模控制研究的重点放在如何抑制甚至消除滑模控制信号的抖动[4]。
本文选择无刷直流电机为研究对象,使用滑模控制方法,为了提高无刷直流电机滑模控制的控制效果,减小抖振,研究了一种基于改进型PI趋近律的无刷直流电机滑模控制方法。
1 BLDCM数学模型
无刷直流电机(BLDCM)由电机本体和驱动装置构成,是一种运用广泛的电动机。以使用最多的三相对称星形接法的直流电机为例[5],其三相绕组的电压平衡方程为:

式中,uA、uB、uC分别为定子绕组相电压;R为相电阻;iA、iB、iC分别为定子绕组相电流;eA、eB、eC分别为定子绕组电动势;L为各相绕组自感;M为每两相绕组间互感;p为微分算子。
根据无刷直流电机电磁转矩的产生原理,可以得到定子绕组的电磁转矩公式为

式中,ω为电机角速度。由式(2)可知,电磁转矩正比于磁通量与电流。所以,可以通过控制转矩来间接控制逆变器的输出电流。
根据电磁感应定律,电机绕组的动态方程为

式中,e为每相的反电动势;ke为反电动势系数。
因为在每1/2周期内的电流的方波持续时间和反电势的梯形波平顶部分的电角度相同,且三相对称星形接法的定子绕组在同一时刻只有其中两相有电流通过,这两相绕组的电流大小相等,方向相反,所以,式(2)可化为

式中,Te为电机电磁转矩;i为定子绕组各相电流;kt为转矩系数。
由于三相电机每相的情况相同,所以可以将式(1)进行化简,得到其中一相的电压为

然后再把式(3)代入到式(5)中,则可以得到

式中,u为电机绕组端电压;R'为绕组电阻;L'为绕组电感;t为时间变量。
无刷直流电机的机械运动方程[1]为

式中,TL为负载转矩;J为电机转动惯量;B为电动机阻尼系数。
2 改进型PI趋近律
自从高为炳院士提出趋近律的概念[6]以来,趋近律设计方法从最初的指数趋近律到变速趋近律,再到现在的组合趋近律,设计方法日益丰富。文献[7]与文献[8]提出了一种变速趋近律,其优点在于原点处的稳定性很好,但缺点是刚进入切换区时的抖振很大。因此考虑将分数阶PI控制算法与该变速趋近律结合,提出了一种改进型PI趋近律。所提出的改进型PI趋近律实际也是一种组合趋近律。
改进型分数阶PI趋近律:
3 滑模控制器设计
3.1 滑模控制律
将滑模控制运用到无刷直流电机中,选择了常用的双闭环调速系统的速度环[9-10]进行控制。
设电机的角速度跟踪误差为

式中,ωr为参考角速度。
设计滑模面切换函数:

式中,c为滑模面的切换向量。对s求导,可得

通过式(6)得

结合式(8)、式(11)、式(12),并用饱和函数sat(s)代替符号函数,饱和函数定义为

3.2 可达性证明
对于滑模变结构控制系统需要讨论其可达性,一般是选择李雅普诺夫稳定性理论进行证明。
定义Lyapunov函数:

则可以得到新的滑模控制律为
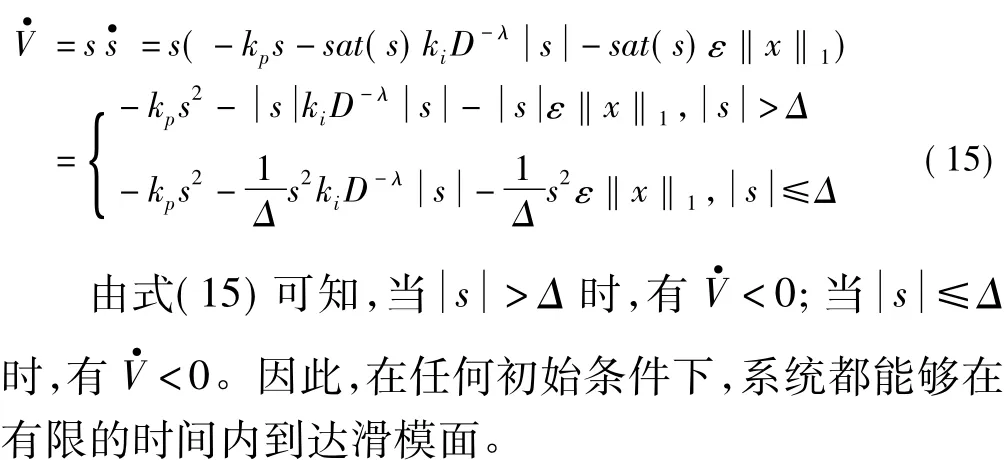
对式(14)求导,得
4 仿真与实验分析
为了验证所提出的滑模变结构控制方法的优越性,在计算机上使用MATLAB/Simulink进行系统仿真[11],并在基于 TMS320F28335的 DSP实验开发平台[12-14]上进行了半实物实验。表1为无刷直流电机参数,图1为无刷直流电机滑模控制系统框图。
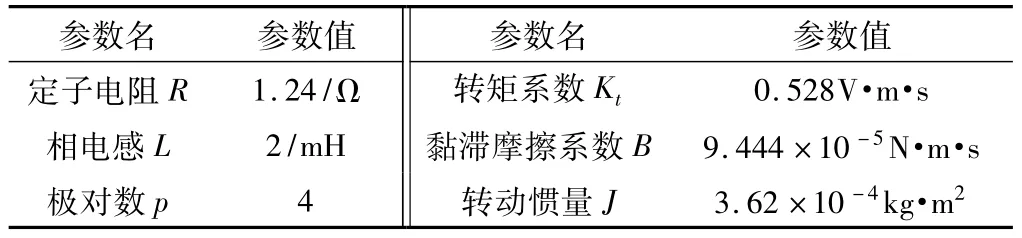
表1 无刷直流电机参数
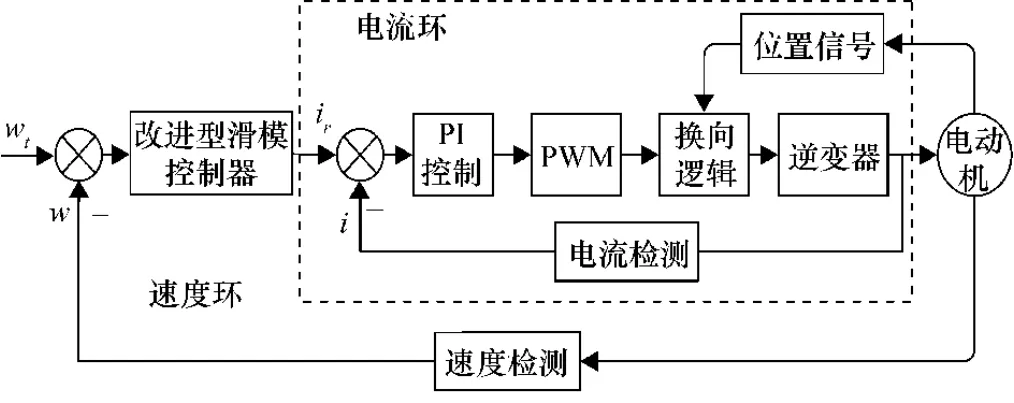
图1 无刷直流电机滑模控制系统框图
4.1 仿真分析
为了验证改进型PI趋近律的优越性,选择将基于新型趋近律的改进型滑模控制(FOPISMC)分别与传统的滑模控制(SMC)以及传统PI控制进行对比仿真。为了保证对比仿真的有效性,将这3种控制方法皆运用于双闭环控制系统[15]的速度环,且电流环都使用PI控制器[16],电机参数相同保持不变。
设定电机的参考转速为2000 r/min,仿真时长为0.1 s,双闭环控制系统的速度环分别采用改进型滑模控制(FOPISMC)、传统的滑模控制(SMC)和传统PI控制。改进型滑模控制器参数为 kp=6,ki=1,λ=0.3,ε =1,c=1;传统滑模控制器的参数为:k=8,ε =1,c=1;PI控制器参数为:kp=0.009,ki=2。电流环PI控制参数保持不变,参数设置为kp=5,ki=2。并在0.05 s时,给系统突加一个3 N·m的负载转矩。仿真结果如图2、图3所示。
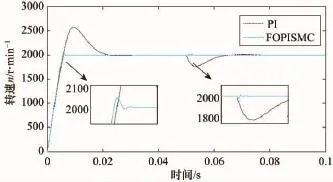
图2 FOPISMC控制与传统PI控制转速比较图
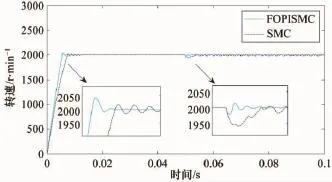
图3 FOPISMC控制与传统SMC控制转速比较图
从图2、图3中可以发现,在0~0.03 s处,FOPISMC控制的响应比SMC控制和PI控制都要快速,到达2000 r/min设定值的时间更短,在0.05 s处时受到干扰后的失调比其他二者都要小,而且回到参考值的时间也更短;在图2中,可以看到在0.03 s处FOPISMC控制的超调远小于传统PI控制,达到稳定的时间也更短;在图3中,可以看到FOPISMC控制的动态性能比SMC控制的动态性能好,在0.05 s处趋于稳定的过程更平滑,抖振更小。经过仿真对比实验可以得到:FOPISMC控制具有响应快、鲁棒性强、抗干扰性好、超调小、抖振小等优点,是一种更优的控制方法。
4.2 实验分析
为了验证所提出的基于改进型PI趋近律的滑模控制方法在无刷直流电机上使用的实际效果,在基于TMS320F28335的DSP实验开发平台上进行转速实验。图4为实验平台的硬件结构图,图5为实验平台实物照。
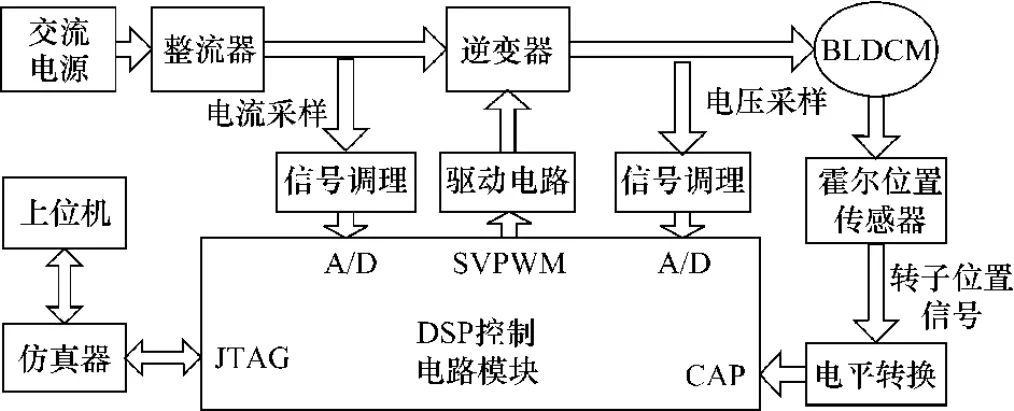
图4 DSP实验开发平台硬件结构图

图5 实验平台实物照
实验平台配套的电机的额定电压为DC24 V,额定转速为3000 r/min,分别使用FOPISMC控制算法、传统SMC控制算法以及传统PI控制算法控制电机转速进行实验。FOPISMC控制参数为kp=6,ki=1,λ=0.3,ε =1,c=1;传统 SMC 控制参数为:k=8,ε =1,c=1;传统 PI控制参数为:kp=0.009,ki=2。实验结果如图6~图8所示。
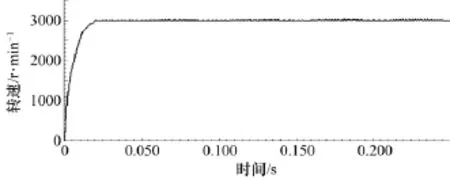
图6 FOPISMC控制转速上升曲线
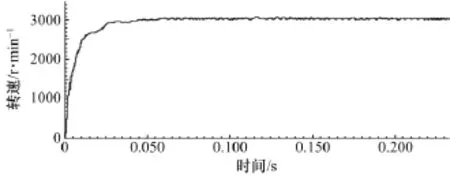
图7 传统SMC控制转速上升曲线
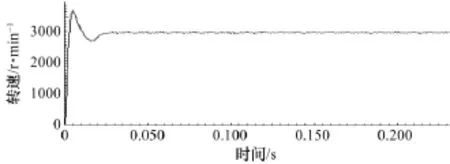
图8 传统PI控制转速上升曲线
经过电机转速实验,从图6~图8可以看到,FOPISMC控制在0.02 s时达到稳定状态,且上升曲线平滑;SMC控制在0.03 s时趋于稳定,并有微小的抖振;而传统PI控制的超调超过3500 r/min,在0.035s时才趋于稳定。因此,可以发现,FOPISMC控制的响应速度快,调节时间短,超调小,上升曲线平滑,抖振小,确实有着更好的控制效果。
5 结束语
将所提出的基于改进型PI趋近律的滑模控制方法应用于无刷直流电机上,并与传统SMC控制、PI控制比较,经过仿真与实验,结果表明,所提出的 FOPISMC控制算法确实有着响应速度快、鲁棒性强、抗干扰性好等优点,并能够较好地抑制系统的抖振,是一种更优的控制方法。
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
一重技术(2021年5期)2022-01-18
北京航空航天大学学报(2021年9期)2021-11-02
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
电子制作(2017年1期)2017-05-17
电子制作(2017年20期)2017-04-26
电子制作(2016年1期)2016-11-07
轻兵器(2016年20期)2016-10-28
