
基于前后驱布置方案的微型电动汽车平顺性研究
2019-10-17 02:24黄如波
汽车零部件 2019年9期
黄如波
(泛亚汽车技术中心有限公司,上海 201201)
0 引言
平顺性作为汽车的重要性能之一,已有许多学者对其影响因素开展了大量的研究,主要集中于轮胎刚度、悬架刚度和阻尼等方面[1-3],而关于非悬挂质量与悬挂质量比率变化对平顺性影响程度的研究较少。本文作者以一款微型电动汽车为例,通过建立整车八自由度平顺性模型对前后驱布置时非悬挂质量与悬挂质量的变化对平顺性的影响进行研究。
1 微型电动汽车的前后驱布置
在电动汽车总布置设计过程中,传统汽车的发动机和燃油箱被电动汽车的电动机和动力蓄电池所替代[4-6]。动力蓄电池为悬挂质量且位置易于布置,因此微型电动汽车的前后驱布置主要是驱动部件的布置,采用前驱动布置时由于前轮转向功能的存在,驱动部件不能直接布置在车轮附近,此时的驱动部件需布置于前舱,通过万向节驱动车轮行驶,则驱动部件的质量表现为悬挂质量;而采取后驱布置时既可将驱动部件置于后车架上,也可将驱动部件布置为直接通过半轴驱动后轮行驶。前者驱动部件的质量是悬挂质量,而后者则为非悬挂质量。前者由于需要其他附属零部件来实现驱动行驶,故对于微型电动汽车的实用性不强,因此后驱布置仅仅考虑驱动部件质量为非悬挂质量的情形。
2 微型电动车平顺性模型的建立
在建立模型时,作如下假设:(1)路面的不平度系数不变,仅与所选的路面等级有关。(2)车身和车架的刚度足够大,不考虑车架弹性变形引起的各阶振型。(3)仅考虑轮胎的刚度,忽略宽度以及阻尼的影响。(4)在路面激励的作用下,车身在平衡位置附近做微幅振动[7-8]。在以上假设的条件下,建立如图1所示的整车八自由度模型。
图1中:mi(i=1,2,3,4)为非悬挂质量;m5为人椅系统质量;mb为车身质量;ci(i=1,2,3,4)为悬架阻尼;c5为人椅系统阻尼;ki(i=1,2,3,4)为悬架刚度;k5为人椅系统刚度;kj(j=6,7,8,9)为轮胎刚度;qi(i=1,2,3,4)为轮胎的路面输入;l1为座椅到质心水平方向的距离;l2为人椅系统到质心横向的距离;l3、l4分别为左、右车轮到质心横向的距离;l5为前轮到质心水平方向的距离;l6为后轮到质心水平方向的距离;z为车身的垂直位移;zi(i=1,2,......,5)分别为对应的垂直位移;θ为俯仰角;ψ为侧倾角;Ix为车身绕x轴的转动惯量;Iy为车身绕y轴的转动惯量。
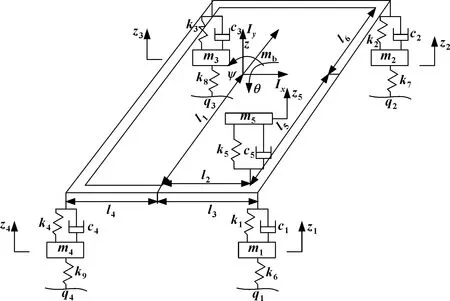
图1 整车八自由度模型
2.1 振动微分方程的建立
在车身俯仰角和侧倾角较小的情况下,车身与悬架连接处以及座椅的垂直位移方程为
(1)
车轮以及座椅的运动方程:
(2)
车身的运动微分方程为
(3)
将式(1)(2)(3)写成如下形式:
(4)
其中:
M=diag(m1,m2,m3,m4,m5,mb,Iy,Ix)
Z=(z1,z2,z3,z4,z5,z,θ,ψ)T
Q=(q1,q2,q3,q4)T
将公式(4)写成状态方程:
(5)

2.2 路面输入模型
路面不平度功率谱密度采用下式[9-10]:
(6)
式中:n为空间频率(m-1),为波长的倒数;n0为参考空间频率,n0=0.1 m-1;Gq(n0)为参考空间频率n0下的路面功率谱密度值,单位为m-3;W为频率指数,一般W=2。汽车振动的输入除了路面不平度外,还要考虑车速因素。一定车速u下驶过空间频率为n的路面不平度时的输入的时间频率f是n与u的乘积,即f=un,由此可以得到时间频率谱密度与空间频率谱密度的关系为
(7)
四轮汽车输入中,前后轮处路面输入相差一个时间滞后量Δt,它取决于轴距L与车速u:
Δt=L/u
(8)
2.3 评价方法
(9)
对记录的加速度时间历程a(t)进行频谱分析得到功率谱函数Ga(f)[11],对功率谱函数进行加权计算得到加权加速度均方根值aw的公式:
(10)
其中:W(f)为频率加权函数。
3 仿真过程
样车的参数列于表1,对所建立的模型取B级路面,对以车速45 km/h行驶时的后驱布置车辆平顺性进行仿真,其车身、座椅的垂向加速度和功率谱如图2—图5所示。

表1 电动汽车的部分参数
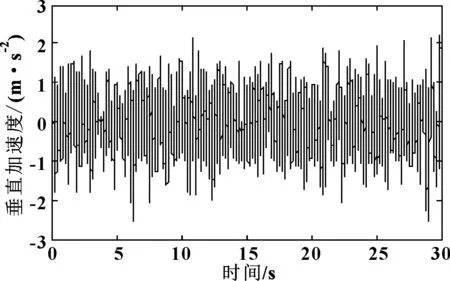
图2 车身垂直加速度
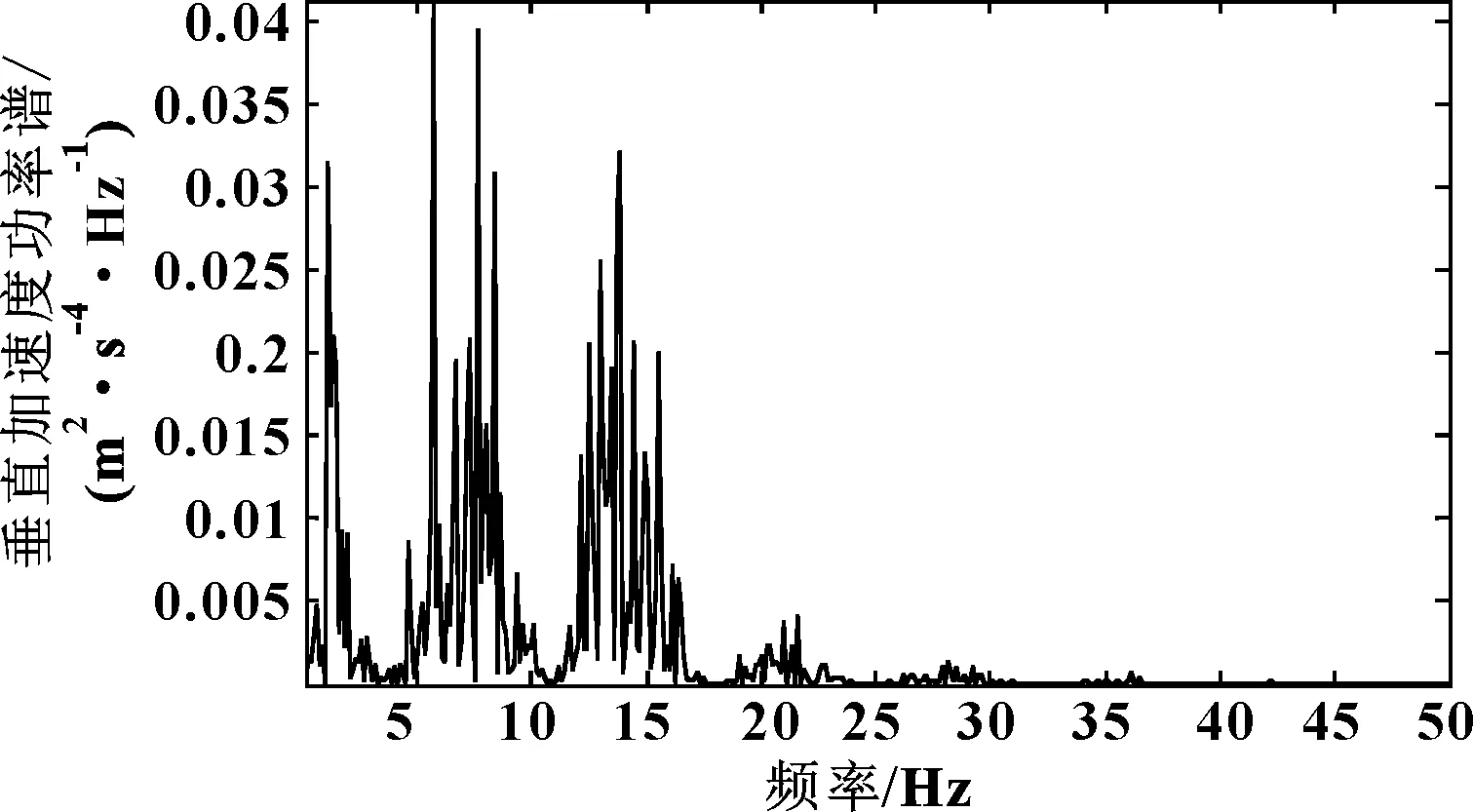
图3 车身垂直加速度功率谱
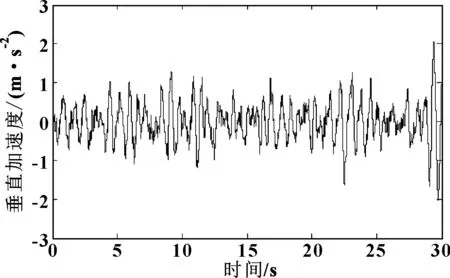
图4 座椅垂直加速度
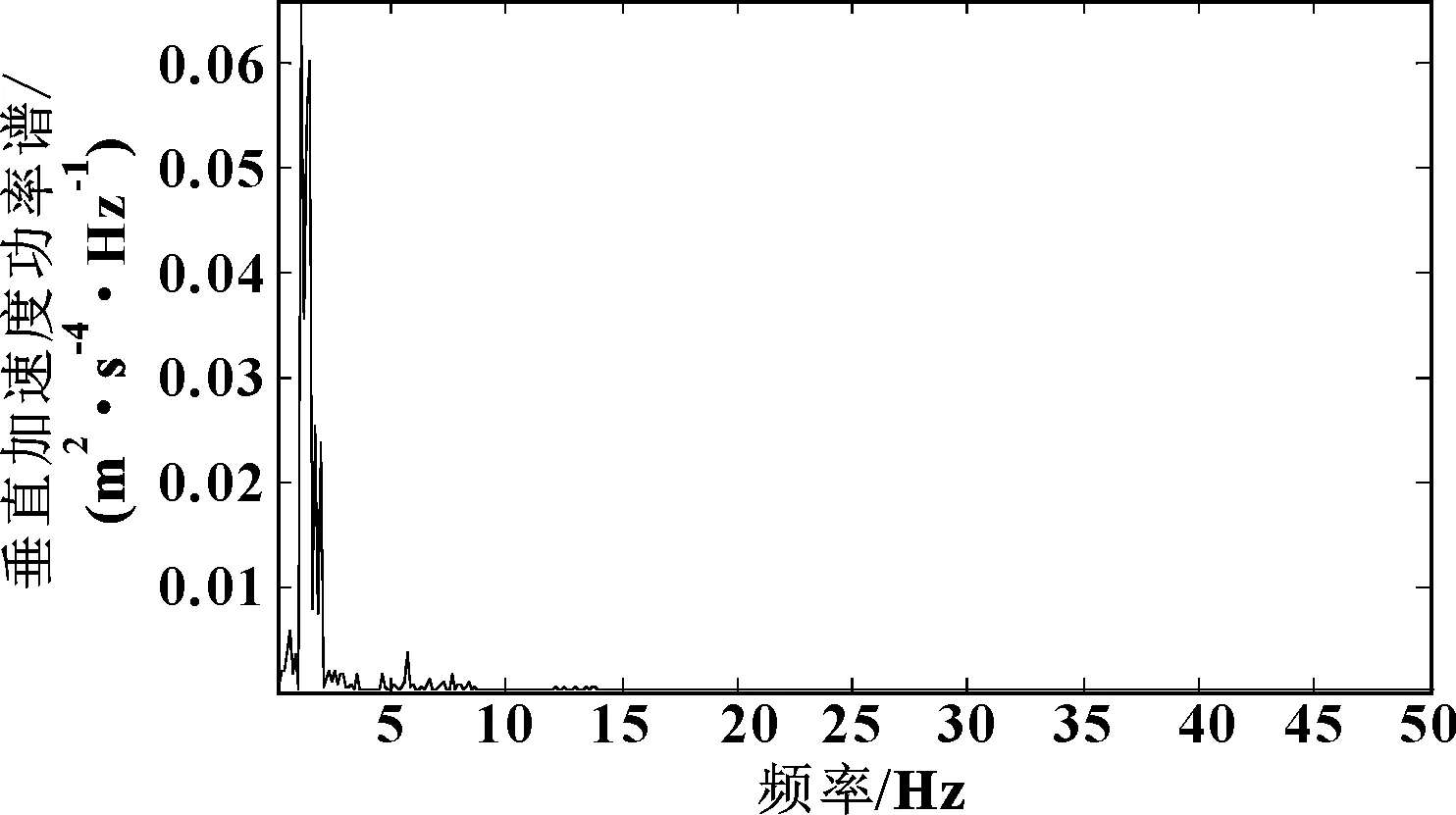
图5 座椅垂直加速度功率谱
从图3可以看出:车身的振动主要集中在2~3 Hz、5~10 Hz以及15 Hz的范围内。从图5可以看出:座椅振动集中在2~3 Hz内。
针对座椅的Z向加速度仿真结果,按照GB/T 13441.1-2007的评价准则做出的舒适性降低界限时间如图6所示,其后驱布置的驾驶员舒适性界限时间为4.8 h。

图6 座椅Z向舒适性降低界限时间
4 试验验证
依标准[12]给定的方法,在干燥沥青路面,以45 km/h的速度行驶,在座椅上安装三向加速度传感器,测得的Z向加速度信号经过数据处理系统进行处理,得到座椅的加速度功率谱和舒适性降低界限时间分别如图7和图8所示。
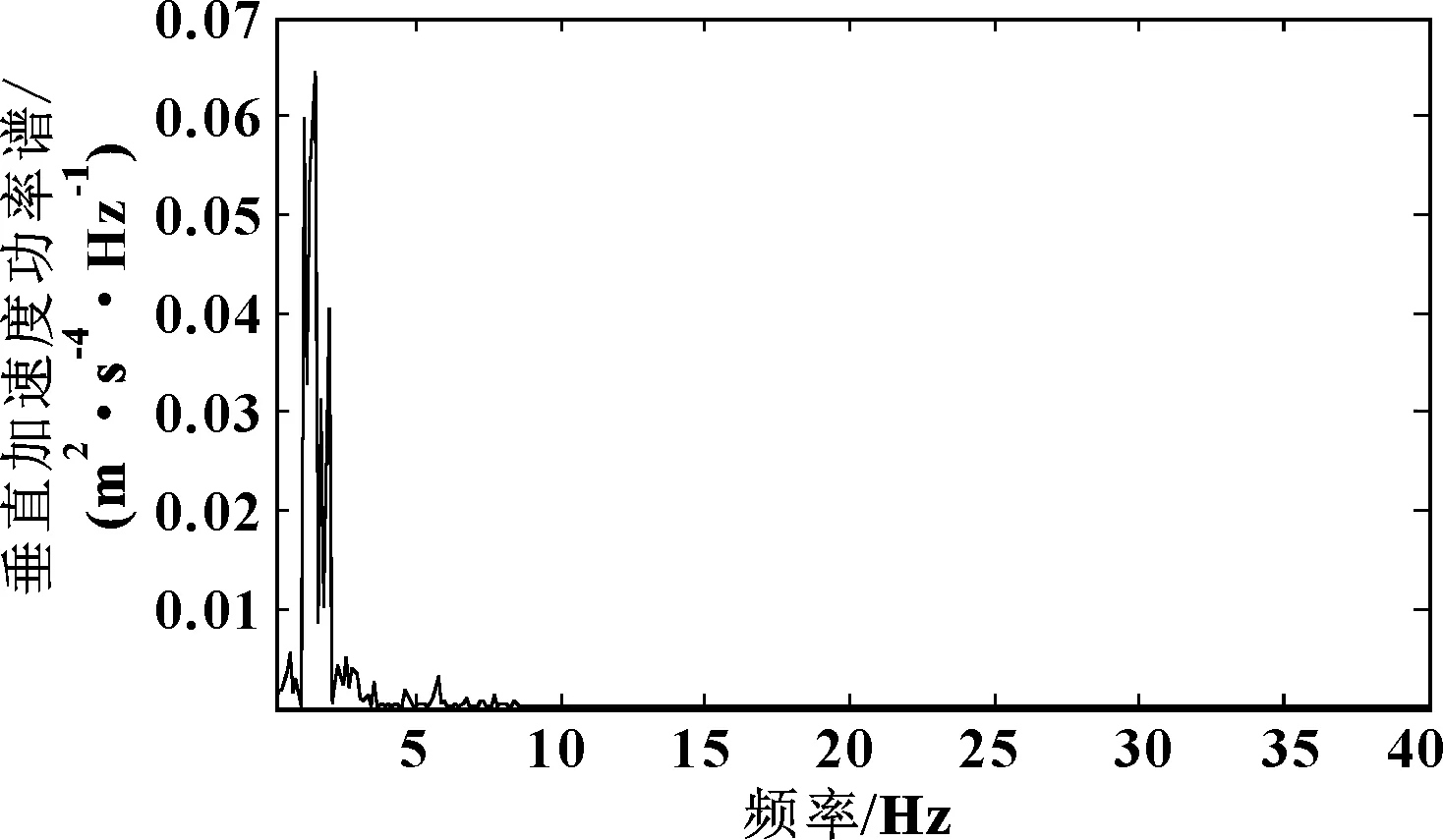
图7 试验的座椅垂直加速度功率谱
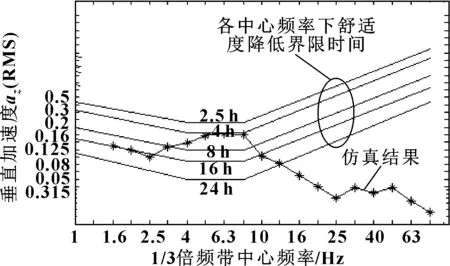
图8 试验的座椅Z向舒适性降低界限时间
由试验和仿真的座椅垂直加速度功率谱图可以看出,两者的图形基本吻合,试验的舒适性降低界限时间是4.5 h,而仿真的舒适性降低界限时间是4.8 h,这主要是由于道路不平度的差异以及试验设备、数据分析设备的误差引起的,可以认为所建仿真模型是可信的。
5 非悬挂质量与轴荷之比对平顺性的影响
对微型电动汽车,由于各轴所分配载荷相对较小,驱动部件的质量由于采用不同的驱动电机、减变速装置而有较大变化,这部分质量与轴荷的比例也会有较大变化,由此对整车平顺性会带来影响。
无论采用前驱或后驱布置,均假设此时的前后轴荷分配为1∶1,并且不随驱动部件的质量而改变。在前后驱布置时,分别针对前轴及后轴的非悬挂质量与悬挂质量的比率对平顺性的影响进行了研究。为此,以B级路面为输入,在20、30和45 km/h时仿真得到的车身、座椅加速度均方根值及Z向舒适性界限时间变化分别如图9—图11所示。
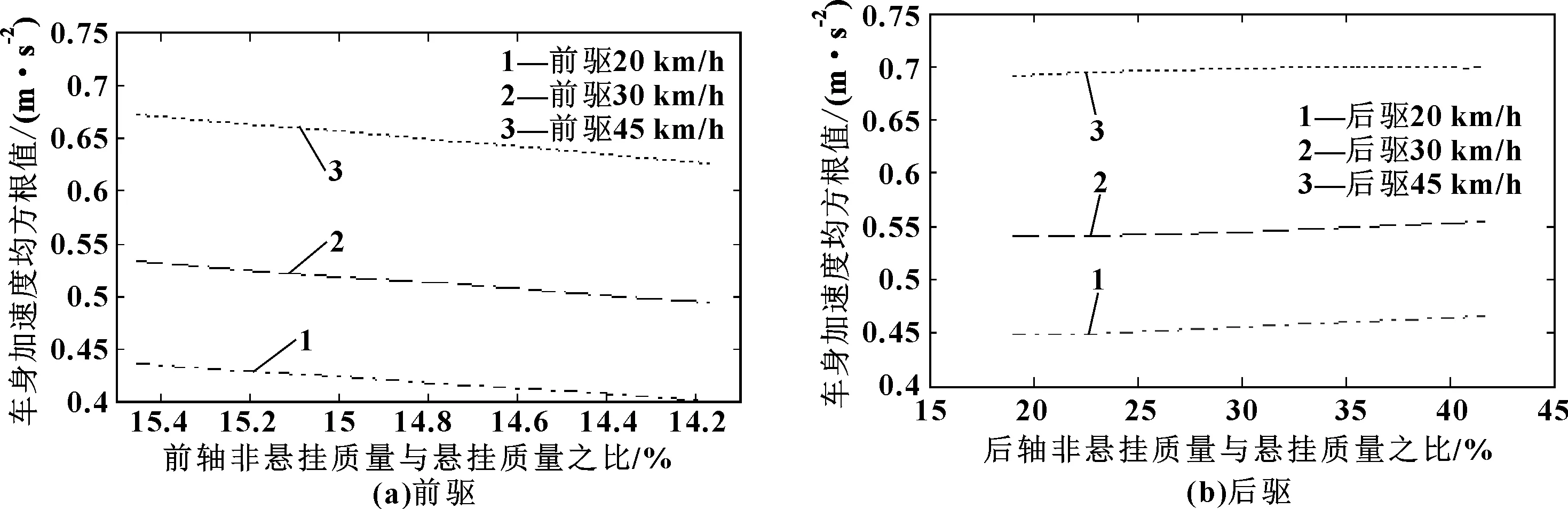
图9 前后驱布置的车身加速度均方根值
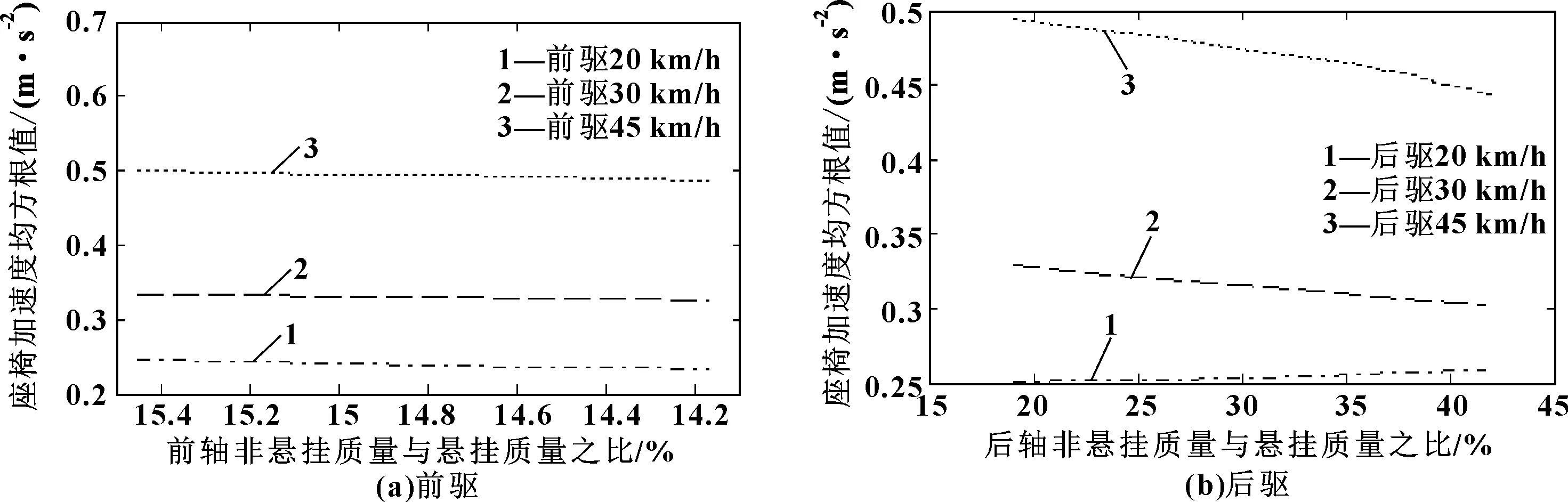
图10 前后驱布置的座椅加速度均方根值
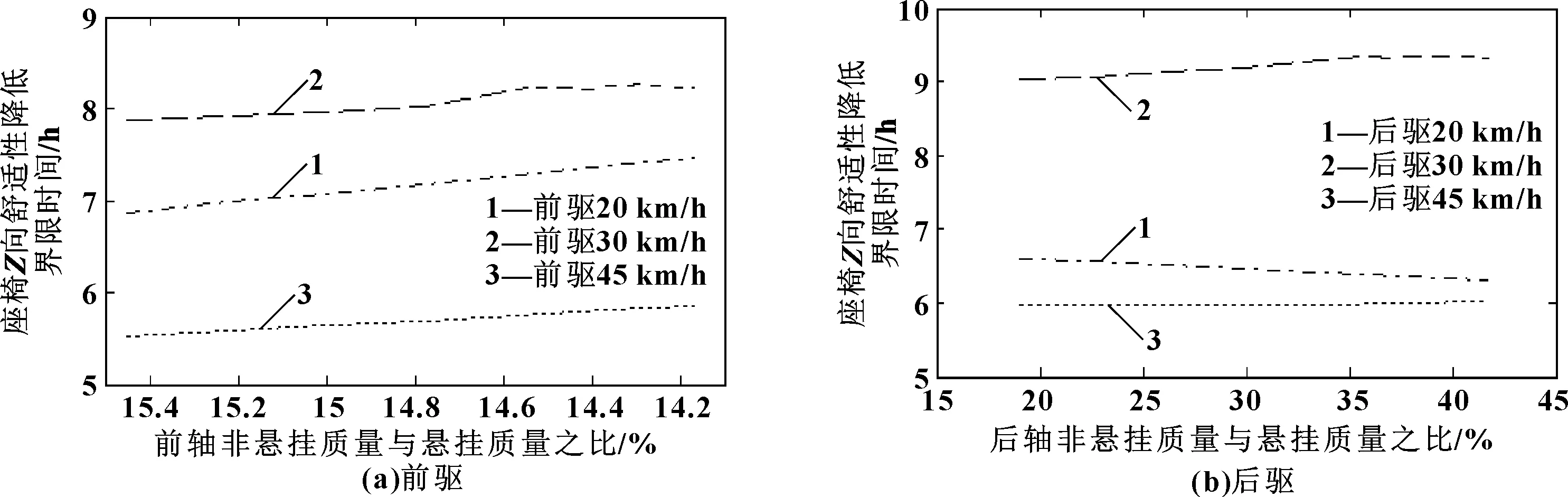
图11 前后驱布置的Z向舒适性降低界限时间
驱动部件的质量增加时,前驱布置时前轴的非悬挂质量与悬挂质量的比例减小,后驱布置时后轴的非悬挂质量与悬挂质量的比值增加。从图9中得出:对于车身加速度均方根值,前后驱布置时与相应的非悬挂质量与悬挂质量之比的变化一致。座椅加速度均方根值如图10所示:前驱布置时,前轴的非悬挂质量与悬挂质量之比减小,座椅的加速度均方根值也减小;在30、45 km/h时后驱布置的座椅加速度数值随着非悬挂质量与悬挂质量之比的增加而减小,而在20 km/h速度时的数值变化相反。Z向舒适性降低界限时间的变化见图11:在相同的速度下,前驱布置的数值随着前轴非悬挂质量比例的减小而增加;后驱的数值在30、45 km/h的速度下随着后轴的非悬挂质量与悬挂质量之比的增加而增加,而在20 km/h速度下的舒适性界限时间逐渐减小。
前驱布置时前轴的非悬挂质量与悬挂质量的比率减小,车身、座椅加速度均方根值也减小,Z向的舒适性降低界限时间增加,并且车身加速度的变化趋势比较明显。这主要是前驱布置时驱动部件为悬挂质量,悬挂质量的增加带来固有频率的降低,车身加速度减小;而座椅加速度变化不明显,主要是座椅衰减振动的作用。后驱时,车身加速度随着非悬挂质量与悬挂质量的比例增加也增加,这种变化趋势与20 km/h速度下的座椅加速度均方根值变化一致,而与30、45 km/h速度下的加速度变化相反。由于驱动部件此时表现为非悬挂质量,而非悬挂质量的增加对车身振动产生的不利影响有限,车身加速度变化不明显。鉴于整车自由度之间的耦合作用,座椅加速度变化趋势与车身的变化不一致。前后驱布置时,在20 km/h速度时的Z向舒适性降低界限时间小于30 km/h速度时的数值,关键是在不同的速度下最大垂向加速度的1/3倍频程中心频率不同,20 km/h速度时的中心频率是5 Hz,而30 km/h速度时的数值是4 Hz。
6 结论
(1)前驱布置时,驱动部件质量的增加导致前轴非悬挂质量与悬挂质量之比下降,车身加速度和座椅加速度减小,舒适性的改善明显。
(2)后驱布置时,后轴非悬挂质量与悬挂质量的比率增加对车身振动产生不利影响,但这种影响有限,座椅加速度在速度改变时出现不同趋势。
(3)一定速度范围内的Z向舒适性降低界限时间与车速成反比,而低速时的数值需要考虑峰值加速度对应的1/3倍频程中心频率大小的影响。
猜你喜欢
十几岁(2022年21期)2022-11-19
福建轻纺(2022年4期)2022-06-01
中国典型病例大全(2022年9期)2022-04-19
小资CHIC!ELEGANCE(2022年2期)2022-01-11
载人航天(2021年5期)2021-11-20
少男少女·小作家(2021年8期)2021-09-13
现代仪器与医疗(2021年2期)2021-07-21
汽车维修与保养(2020年11期)2020-06-09
科学与财富(2020年6期)2020-05-19
小学语文教学·会刊(2019年2期)2019-09-10
