
低重频短驻留悬停直升机检测技术
2019-10-16 06:53岳三创陈尹翔
火控雷达技术 2019年3期
王 勇 张 楠 岳三创 杜 力 陈尹翔
(西安电子工程研究所 西安 710100)
0 引言
目前,悬停直升机检测的方法有很多,主要可以分为两类:一类是基于时域周期性峰包检测的方法[1-5]。另一类是基于频域旋翼多普勒谱的检测方法。孙文峰对旋翼回波进行建模和分析,提出了一种时域多周期扫描Hough变换积累检测方法,解决旋翼时域回波信噪比较低下的检测问题[1-2]。李国健等人对文献[2]的方法进行改进解决了主旋翼旋转频率抖动条件下时域多周期扫描Hough变换积累检测方法性能下降问题[5]。杜兰等仿真了AH-64的雷达回波,给出了一种多周期积累方案来提高旋翼的时域回波信噪比[3]。董普靠等人给出了一种基于时域相关的检测方法[4],通过时域相关来检测周期性峰包。第一类方法基于时域周期性峰包进行检测,对脉冲重复频率和驻留时间要求很高,地面情报雷达的搜索工作参数一般很难满足。由于直升机主旋翼回波频域能量扩散信噪比较低,第二类方法研究较少。汤子跃等人分析了旋翼多普勒谱的特点,提出了一种多普勒通道多级检测方法,该方法对脉冲重复频率要求较高[6]。陈尹翔等人提出了一种基于翼毂多普勒的检测方法,该方法对姿态不敏感,但对信噪比要求较高[7]。王育东研究了低重频短驻留搜索雷达的悬停直升机检测问题,提出了一种多普勒维非相干积累的检测方法[8]。
本文结合地面情报雷达搜索模式工作的特点,采用多种手段来提高旋翼回波的频域信噪比,然后低门限CFAR将旋翼回波检测出来,通过Hough变换检测沿多普勒维的直线检测悬停直升机并降低低门限检测带来的虚警。
1 时域周期性峰包检测方法对系统参数的要求
当采用时域周期性峰包来检测悬停直升机时,要求在驻留时间内尽可能多地接收到含有周期性峰包的回波信号,同时在每一个峰包的持续时间内有一个以上的采样,这对系统的脉冲重复频率和驻留时间提出了较高的要求。
1)波束驻留时间的要求
峰包出现的频率为fT=DNR0[2],则闪烁周期T=1/DNR0,为了确保雷达观测周期内能够测到峰包,雷达的波束驻留时间必须满足
(1)
2)脉冲重复频率的要求
(2)
其中叶片数为奇数时D=2,k=1;叶片数为偶数时D=1,k=2。
中国青年雕塑的人才与作品辈出的另一个重要背景,那就是上世纪90年代开始的大学扩招。传统的雕塑招生是一个比较精英式的定位,每一个班最多也就十来人,文革前的雕塑招生还经常是一班招5个人。90年代的扩招一方面是单位班从原来的几人或者是十来人扩招到三十来人,有的学校甚至更多;另一方面就是大量新的雕塑系或者是雕塑专业随着艺术院校在全国各综合性大学遍地创建而应运而生。在这样的背景下,雕塑的学习者数量空前巨大。这样一个庞大的基数必然是雕塑繁荣的基础和土壤。雕塑的青年创作者这么多,每人都发挥一点作用,合起来的能量就会足够地炙热和火爆。
对某S波段地面情报雷达来说,采用时域周期性峰包法检测米171脉冲重复频率最低为2100Hz,波束驻留时间最短为31.85ms。对于地面情报雷达远距搜索时,上述参数要求是较难满足的。
2 低重频短驻留参数对悬停直升机检测的影响
1)低重复频率的影响
地面情报雷达工作在搜索模式时,一般优先保证探测距离不模糊,因此重复频率较低,比如当不模糊距离为150km时,重频不能高于1000Hz。图1给出了不同重频米171的旋翼时域回波,从图中可以看出,当重频降低时,周期性峰包的峰值较难被采集到。图2给出了不同重频米171的实测时频平面,从图中可以看出,重频降低导致频谱混叠,谱线周期特征较难提取与利用。


图1 不同重频米171旋翼时域回波

图2 不同重频下直升机实测时频平面
2)短驻留时间的影响
地面情报雷达搜索时为了保证数据率,每个方位波束驻留时间较短,比如当数据率为6s/r,波束宽度为1.6°时,每个方位波束驻留时间为26.7ms。图3给出了短驻留条件下米171旋翼时域回波,从图3(a)中可以看出,驻留时间变短导致周期性峰包有可能采集不到。图4给出了不同驻留时间条件下直升机实测归一化频谱,从图中可以看出,驻留时间变短导致频谱分辨率降低,谱线细节信息丢失。

图3 不同回波时刻米171旋翼时域回波
综合图1和图3我们发现,低重频短驻留导致时域周期性峰包不能被可靠地采集到,因此基于时域周期性峰包的检测方法并不适用于低重频短驻留的地面情报雷达搜索模式。
综合图2和图4我们发现,低重频短驻留导致频谱分辨率下降,旋翼多普勒模糊,基于频域谱线特征的直升机检测方法也不适用于低重频短驻留的地面情报雷达搜索模式。
3 低重频短驻留悬停直升机检测算法
1)旋翼频域展宽特性
对于低重频短驻留地面情报雷达搜索模式而言,尽管一个CPI内的回波可能不包含桨叶峰值,但从采集到的不包含桨叶峰值的回波中也可以看出旋翼回波的频域展宽特性,只是此刻的最大多普勒并不是理论上最大的,并且多普勒的幅度较小,但是展宽的特性还是可以观察到的。图5给出了低重频条件下米171不同叶片的归一化多普勒曲线,从图5中可以看出,不管对于哪一时刻,总有叶片的多普勒频率不为0,说明直升机旋翼频域展宽现象是一定存在的。

图5 米171各叶片归一化多普勒变化曲线
图6给出了不同参数下直升机实测距离多普勒平面,从图6中我们发现,旋翼的展宽特征不受系统参数的影响,在距离多普勒平面上表现为沿频率维的一条直线,因此可以根据旋翼在频域上的展宽特征识别直升机。


图6 直升机实测距离多普勒平面
2)旋翼频域展宽信噪比降低的解决措施
频域检测悬停直升机最大的问题是由于旋翼频域展宽,信噪比太低,导致无法直接对旋翼回波进行频域检测,为此我们采用三种积累手段来提高旋翼回波的频域信噪比。首选通过FFT进行相干积累,然后采用方位相邻波束非相干积累,最后采用圈间二进制积累,通过三种积累方式,提高旋翼回波频域信噪比。图7给出了直升机实测回波波束间非相干积累结果。从图7中可以看出,旋翼频域回波信噪比明显增强。

图7 直升机实测回波波束间非相干积累结果
3)基于频域展宽特征的直升机检测流程
图8给出了基于频域展宽特征的直升机检测流程。其中在CFAR检测时,门限较低,目的是为了保证旋翼频域回波能尽量多的通过检测门限,这样做虽然会导致虚警,我们在后面利用Hough变换峰值检测能够将不在沿多普勒维直线上的虚警去掉。
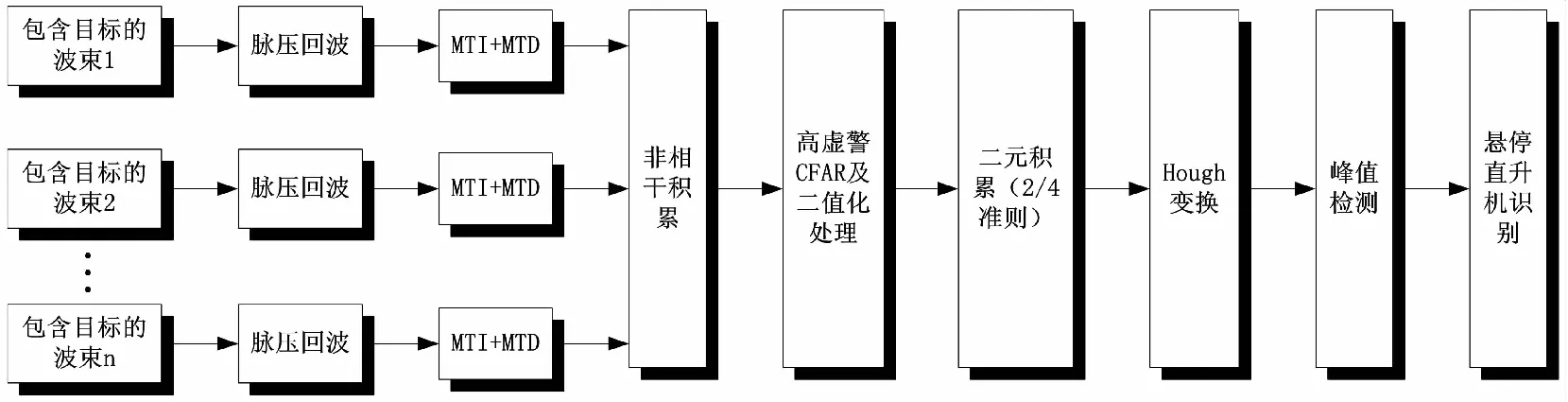
图8 基于频域展宽特征的直升机检测流程
试验数据来自某低空直升机的回波数据,其中波束驻留时间较短,回波的距离多普勒平面如图9(a)所示。图9(b)给出了3个CPI非相干积累的结果,从图中可以看出,旋翼的频谱在多普勒域产生了较明显的展宽,图上出现了一条垂直的直线。图9(c)、图9(d)分别给出了CFAR检测和二值化处理结果,其中二值化处理,指将超过门限的点的幅度置为1。图9(e)给出了4圈数据二元积累结果,积累准则为2/4。图9(f)给出了Hough变换结果,对应的峰值检测结果如图9(g)所示,从图中可以看出hough变换结果存在峰值,说明在原图像中检测到了直线。图9(h)给出了原距离多普勒平面的直线检测结果,从图中可以看出,检测到了旋翼引起的频谱展宽特征,从而说明检测到悬停直升机。
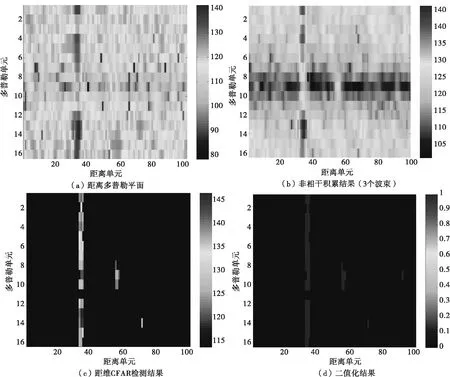

图9 基于频域展宽特征的直升机检测结果
图10分析了不同信噪比条件下的米171回波机身信噪比和机翼信噪比对比结果,从图10可以看出,机翼回波信噪比比机身大概低6~8dB,即悬停直升机检测威力相当于非悬停机身检测威力的0.65左右。表1给出了不同信噪比下悬停米171的检测结果,从表中可以看出,随着旋翼信噪比的下降,检测性能也会下降,因此为了可靠检测悬停直升机,应该提高旋翼回波信噪比,至少保证积累后机翼信噪比大于9.44dB。
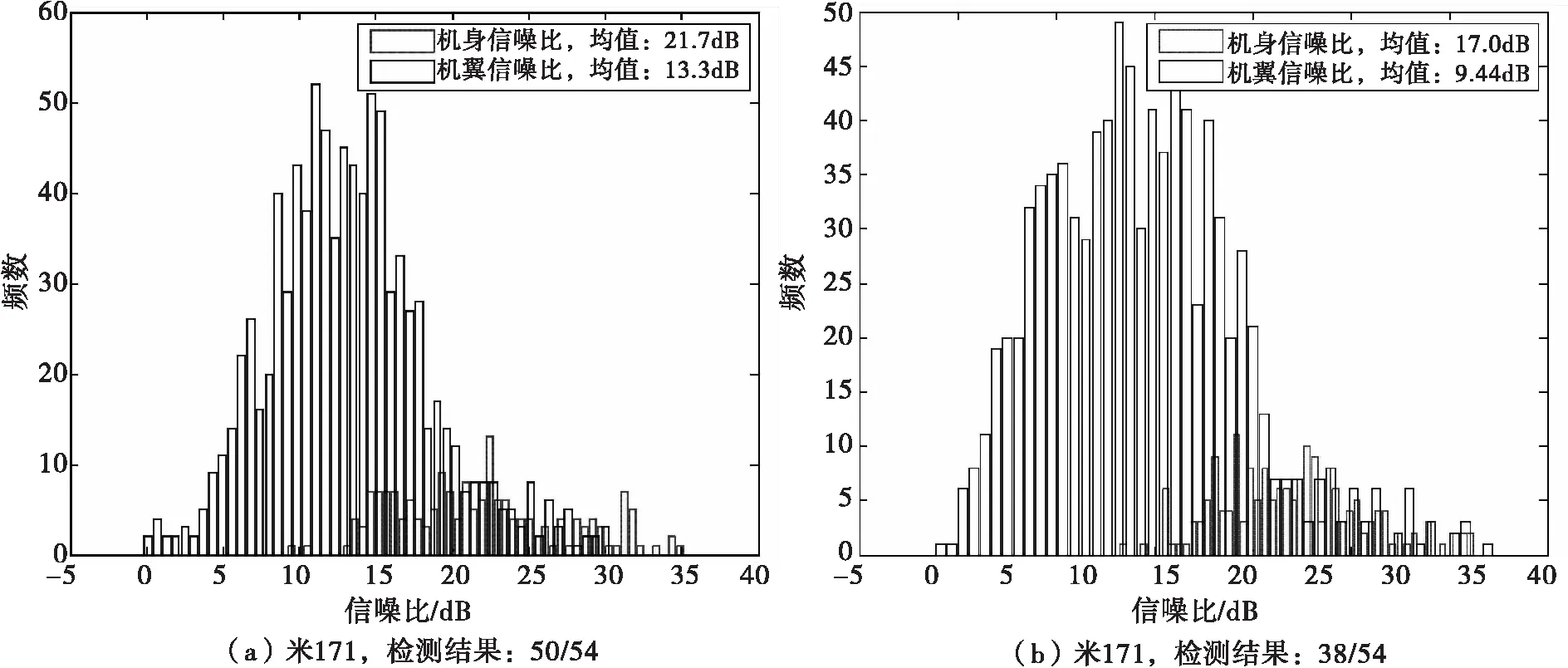

图10 不同信噪比条件下的米171回波机身信噪比和机翼信噪比对比结果
表1 不同信噪比下米171的检测结果

序号机身信噪比(dB)机翼信噪比(dB)信噪比下降(dB)威力比检测结果121.713.38.40.6250/54217.09.447.560.6538/54313.87.237.570.6930/54410.54.815.690.726/54
4 结束语
本文针对低重频短驻留条件下悬停直升机检测问题,提出了一种基于频域多普勒维展宽的检测方法。该方法利用旋翼高速旋转带来的多普勒维一定展宽的特点,对系统参数没有任何要求。针对旋翼频谱能量沿多普勒维扩散信噪比较低的问题,本文通过脉冲间相参积累、波束间非相参积累以及圈间二进制积累等手段来提高旋翼频谱信杂比,实测数据处理结果说明了所提方法的有效性。
猜你喜欢
电声技术(2022年7期)2022-09-23
防爆电机(2021年4期)2021-07-28
成都信息工程大学学报(2021年1期)2021-07-22
北京汽车(2021年2期)2021-05-07
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
科技视界(2020年24期)2020-08-26
现代电子技术(2020年3期)2020-08-04
舰船科学技术(2020年3期)2020-04-22
军事运筹与系统工程(2019年4期)2019-09-11
