
一种基于卫星单天线的弹体伪姿态测量新方法
2019-10-16 06:50李耀军李喜民程晓冉
火控雷达技术 2019年3期
李耀军 李喜民 潘 泉 程晓冉
(1.西安电子工程研究所 西安 710100;2.西北工业大学 西安 710129)
0 引言
载体姿态信息是导航与制导领域不可缺少的信息。炮弹、榴弹、火箭弹等常规旋转弹药,在获得旋转稳定性的同时给弹姿测量带来了困难[1],主要体现在量程、动态范围及测量精度,转速超过10Hz的情况,已将惯性导航排除在外,目前主流的测量组件是地磁类传感器,量程大,动态范围宽,然而不足之处在于精度低且受地磁场方向约束。常规弹药制导化是智能弹药的发展趋势[2],无控弹药如能实时获取弹体的飞行姿态,以及电动舵机、气动舵机或者脉冲发动机的舵片的实时位置,基于事先设置的控制策略驱动执行机构舵偏角,及时改变弹体气动力,持续调整弹体位置逼近预置弹道,实现弹道修正与精确控制,进而实现精确打击[3-5]。由此可见,如何获取常规弹药的飞行姿态直接关系到常规弹药的精确制导能力[6-7]。
长基线卫星姿态测量系统[6]具有高精度位置和姿态测量优势。多天线卫星姿态测量技术目前已经比较成熟[7-8],已进入工程应用阶段;同时,基于多天线卫星测姿系统天线阵列结构复杂、安装要求较高、重量、体积、功耗及成本都难以满足低成本制导弹药的要求,极大地限制了卫星导航与测姿技术在智能弹药方面的应用[8-9]。
探索单天线卫星导航与测姿新技术,将基于运动学原理开展弹体姿态测量技术研究。作为基于载波卫星导航与测姿技术的补充和备份[9-14],面向制导弹药二维弹道修正执行机构对弹体姿态的需求,运用弹体运动学原理,在不引入惯性测量单元、地磁等其他传感器的情况下,基于传统卫星导航接收机输出的速度信息,在弹体飞行攻角和侧滑角较小的情况下,实现了弹体三维姿态运动学建模,由于通常情况下攻角和侧滑角难以给出,计算的姿态即称之为伪姿态,其测量精度能够满足常规弹药制导化需求。
引入伪姿态[9-14]的概念,分析了由伪姿态测量辅助求取载体姿态的具体算法,建立了单天线卫星姿态测量的数学模型,通过设计相应的滤波器对状态参数进行估计,得到相应伪姿态信息,根据常规姿态与伪姿态的关系,得到常规姿态信息。
1 单天线伪姿态测量
1.1 伪姿态测量
根据弹体应用实际条件,相关坐标系,如载体坐标系(Obxbybzb)、地理坐标系(Otxtytzt)、风轴系(Owxwywzw)、稳定坐标系(Osxsyszs)及常规姿态和伪姿态的定义参见文献[18]。基于上述坐标系定义及载体姿态约定,给出载体伪姿态的解算模型[19]。
假设已知速度矢量为
v=vei+vnj+vuk
(1)
则,加速度矢量为
a=aei+anj+auk
(2)
如图1所示伪姿态角之间的几何关系,可得伪偏航角ψs计算公式为
ψs=arctan(ve/vn)
(3)
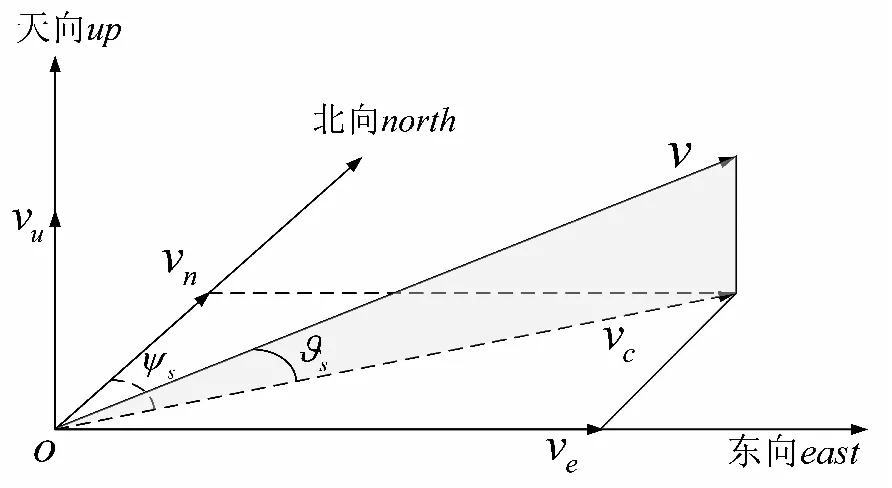
图1 伪姿态角之间的几何关系
同时,易得伪俯仰角ϑs计算公式为
(4)

(5)

图2 加速度与各矢量之间的关系
滚转角与各矢量之间的关系如图3所示,则伪滚转角计算公式为
(6)

图3 滚转角与各矢量之间的关系
1.2 计算流程
卫星导航接收机在接收到卫星信号后,通过一系列导航解算处理后,得到载体的位置和速度信息;地理坐标系下的速度分量信息通过卡尔曼滤波处理得到稳定的东、北、天方向的加速度分量;然后,基于速度分量信息和加速度分量信息进行伪姿态信息的解算,求取载体的伪偏航角、伪俯仰角和伪滚转角。最后,对计算得到的载体姿态信息,进行优化处理,以提高姿态信息的精度。整体方案如图4所示。

图4 单天线GPS姿态测量系统结构图
1.3 状态估计
在地理坐标系下速度v={ve,vu,vn}已知的情况下,其对应的加速度a={ae,au,an}可以通过构建三个独立的卡尔曼滤波器估计出来,下面将以东向为例构造卡尔曼滤波器。
假设k时刻xe(k)的东向分量为
(7)
设k+1时刻状态[10]
xe(k+1)=Φxe(k)+z(k)
(8)
其中,Φ为转移矩阵,z(k)为系统噪声。
构建状态观测方程
ye(k)=Hxe(k)+v(k)
(9)
其中H为观测矩阵,只计量速度,写为
H=[1 0 0]T
(10)
至此,完成东向速度分量与加速度分量的滤波器设计,相关计算公式如下
其中,Q为系统噪声,R为观测噪声。同理,计算出北向和天向的相关状态分量。
1.4 矢量计算
卫星接收机输出速度v和高度h,可差分出偏航角λ,由此可得东向及北向速度
(12)
速度分量vu可通过差分方式获得
vu=[h(k+1)-h(k)]/Δt
(13)
假设地理坐标系下加速度为a={an,ae,au},可通过对速度的北向分量进行差分,计算出加速度的北向分量
an=[vn(k+1)-vn(k)]/Δt
(14)
同理,计算出其他加速度分量,则
a=ani+aej+auk
(15)
1.5 姿态变换
若已知坐标系旋转角α,β,可根据变换矩阵[20]由伪姿态计算出常规姿态,计算公式如下所示。
地理坐标系变换到稳定坐标系的方向余弦矩阵,记为R(ψs,ϑs,γs)
R(ψs,ϑs,γs)=
(16)
稳定坐标系变换到载体坐标系的方向余弦矩阵,记为L(α,β)
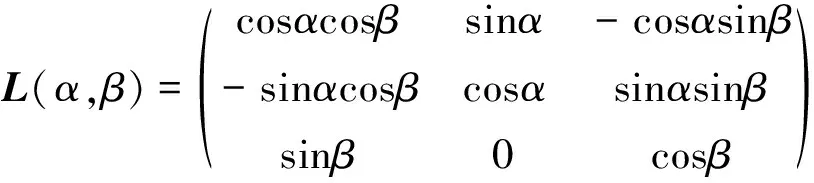
(17)
地理坐标系变换到载体坐标系的方向余弦矩阵,记为R(ψ,ϑ,γ)
R(ψ,ϑ,γ)=L(α,β)R(ψs,ϑs,γs)
(18)
(ψ,ϑ,γ)即为常规姿态。
1.6 优化计算
对求得的姿态信息进行优化处理。尝试了采取α-β滤波及高斯牛顿迭代法进行姿态信息的优化计算。
1)α-β滤波
建立估计方程
(19)
式(19)中,xp(k+1)为位置估计值,vp(k+1)为速度估计值,T为量测周期。
则,xs(k)与vs(k)可计算如下
(20)
式(20)中,xm(k)为实时量测。
2)高斯牛顿迭代法
高斯牛顿迭代法是非线性最小二乘的一种优化算法,采用逐步迭代的方法,把非线性问题变成一步一步迭代的线性问题,从而达到极值收敛。算法步骤如下:
①确定目标函数;
②选取初值,将解算的初始时刻的姿态信息选为迭代初值;
③对第k次迭代计算雅克比矩阵及增量Δxk=(JTJ)-1JTε(xk);其中,J为雅可比矩阵,ε(xk)为第k步时的残差,Δxk是第k步时的增量;
④若增量Δxk小于规定的精度值,则停止迭代。否则,更新xk+1=xk+Δxk;
⑤循环执行步骤②及步骤③直到满足终止条件或达到最大循环次数。
2 实验测试与分析
2.1 实验流程
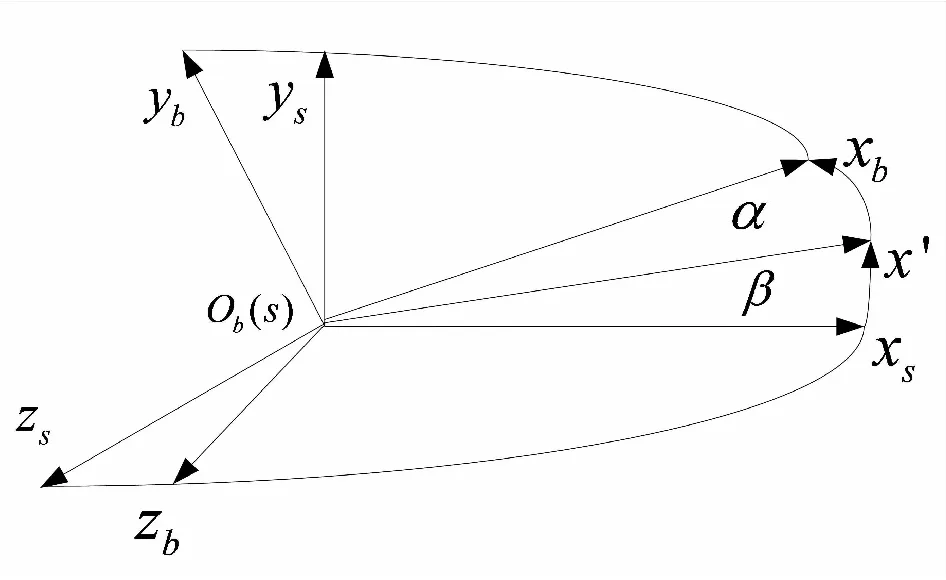
图5 稳定坐标系与载体坐标系之间的关系
为验证算法的可行性和有效性,对某火箭弹单天线卫星测姿系统进行实验分析。整个仿真流程如图6所示。
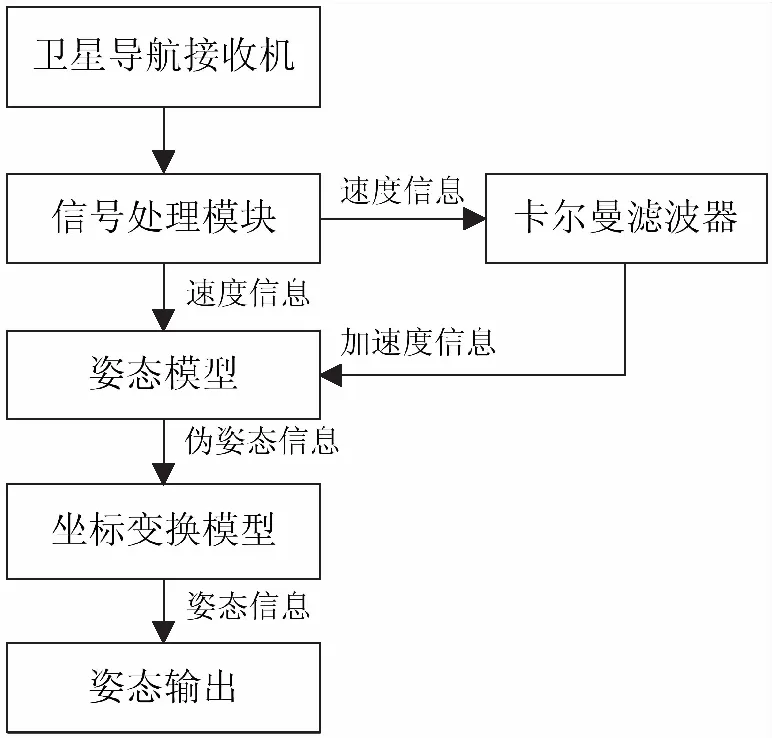
图6 单天线测姿实验流程图
1)将卫星输出的速度数据进行矢量化处理,并分离出速度信息,该速度信息作为输入量为卡尔曼滤波器所用,通过滤波估计,得到载体的实时加速度;
2)速度与加速度信息作为伪姿态模型的数据输入,通过箭体计算机实时运算可求取载体的伪姿态;
3)根据式(20)可求取常规姿态角(ψ,ϑ,γ)。
2.2 实验结果及分析
对实验数据进行算法验证,由从GPS解算的信息中,得到三个方向的速度,即东向速度,北向速度,和天向速度,通过伪姿态算法对姿态信息进行解算与处理,将处理后的姿态信息,与真实姿态信息做比较,得到姿态的误差角度,以验证该算法的有效性。
1)无人机挂飞实验一组
①偏航角实验测试
从挂飞数据的可以看出测姿误差范围都在±10°。在处理姿态信息时存在初值选取的问题,这是其弊端之一,如果初值的选取不合适,那么结果将会收敛到另外一个值上,甚至会引起结果的发散。实验结果如图7所示。
②俯仰角实验测试
从挂飞数据的俯仰角实验结果来看,高斯牛顿方法与α-β滤波方法的效果基本没有差别,两种方法的误差都在±10°之间。同样,高斯牛顿法存在初始值的选取问题,结果如图8所示。
③滚转角实验测试
使用高斯牛顿方法处理数据,滚转角在一个较大的范围内波动,若初值选取不合适,则无法收敛到合适的值上。从实验结果里看,使用α-β滤波方法处理后的姿态信息更加平稳。从两种方法的误差来看,高斯牛顿方法的误差范围在±10°,α-β滤波方法处理后的数据误差范围在±8°,两者有一定差别,但并不明显。两种方法的处理时间仍是高斯牛顿方法所需时间大于α-β滤波所需时间,多次实验所得结论一致。实验结果如图9所示。

图8 无人机挂飞实验俯仰角测试结果

图9 无人机挂飞实验滚转角测试结果
2)无人机挂飞实验二组
无人机挂飞实验二组实验结果如图(9)所示。从无人机挂飞实验二组实验结果来看,在偏航角的信息处理中,两种方法得到的结果近乎近似。在俯仰角的信息处理中,高斯牛顿方法相比α-β滤波方法更好一点,但不明显,两者的误差范围都在-10~10°。在滚转角结果中,高斯牛顿方法相比α-β滤波方法较差,高斯牛顿方法的误差在-10~10°,α-β滤波方法误差在-6~6°。总体来看,本组实验与无人机挂飞实验一组所得结论一致,实验结果如图10所示。
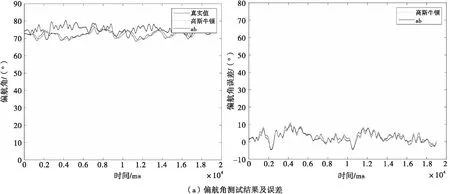
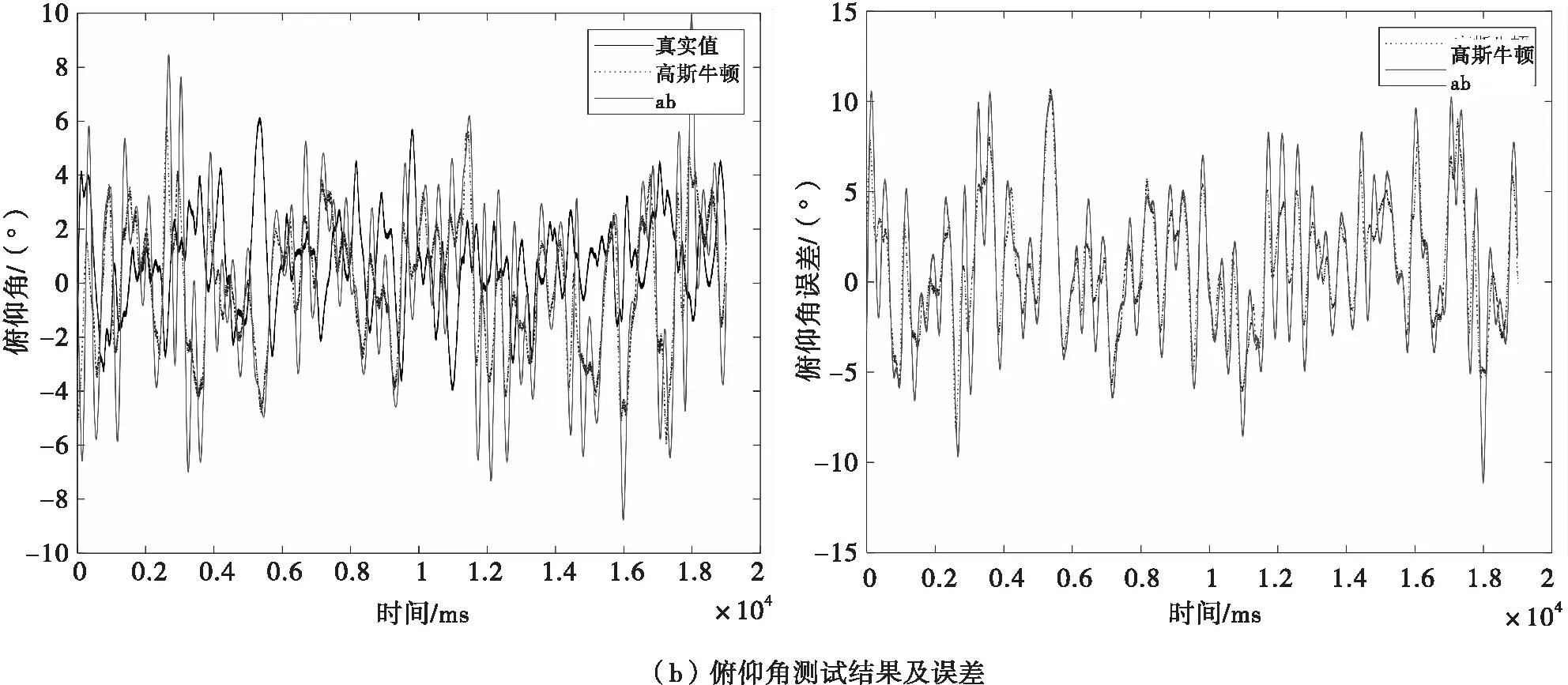
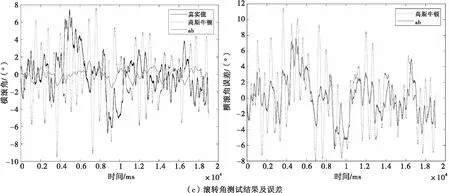
图10 无人机挂飞实验偏航、俯仰、滚转角测试结果
3 结束语
利用单天线卫星测姿技术破解卫星导航在旋转弹上无法测姿的难题,可以用较低成本同时提供位置和姿态信息,具备弹姿/弹道一体化测量功能,替代惯性导航及地磁传感器,在增强卫星制导组件的功能和性能的同时,大幅提高制导组件耐高过载能力及可靠性,也将大幅降低二维制导组件成本,具有较强的实际应用价值。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
北京航空航天大学学报(2019年9期)2019-10-26
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
电子制作(2019年9期)2019-05-30
数学大世界(2018年1期)2018-04-12
科技视界(2018年3期)2018-04-02
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
电影故事(2015年16期)2015-07-14
