
24GHz MFSK车载雷达盲区监测系统设计
2019-10-16 06:50张莉楠李小红
火控雷达技术 2019年3期
张 兢 张莉楠 李小红 李 岳
(重庆理工大学 重庆 400054)
0 引言
近几年,我国汽车总保有量增加,导致道路交通紧张,交通事故频繁发生,给社会和家庭带来人身、精神伤害和财产损失[1-4]。奔驰汽车公司对各类交通事故研究表明:如果驾驶人员的大脑可以提前1s意识到事故将要发生并且准确无误地做出相应措施,那么绝大多数的交通事故都可以避免[5]。因此,高级驾驶辅助系统(Advanced Driver Assistance Systems,ADAS)的研制与开发对于提高道路交通运输和保障汽车行驶安全具有非常重要的现实意义和应用前景[6]。目前车载雷达系统研究主要集中在美国、日本和欧洲等发达国家,起步早,并且技术相对成熟和全面,已经研制出可供装车使用的产品。国内在汽车防撞雷达方面,主要是几所高校在做实验研究,尚未有正式的产品出现[7]。盲区监测作为ADAS主流技术之一,其主要是探测行驶车辆的后方盲区区域,如果有其他车辆进入盲区,车后视镜的指示灯将会亮,从而提醒驾驶者不要有突然制停等动作。毫米波雷达探测性能稳定,抗干扰能力强,穿透能力强,可以做到全天候工作,不受光线、雾霾、沙尘暴等环境影响,优于激光雷达、超声波雷达和红外线。24GHz车载雷达主要用于近程汽车雷达,具有成本低、波束宽、覆盖范围广的特点,本文实现基于24GHz毫米波雷达传感器的汽车盲区监测系统设计。
目前雷达信号表现形式主要包括单频连续波(CW)、线性调频连续波(LFMCW)、频移键控(FSK)、多频移键控(MFSK)[8]。CW雷达的工作原理实质是根据多普勒效应,利用多普勒频率求得目标的速度,但是无法分辨多目标同速靠近或者远离。LFMCW雷达计算简单,分辨率好,但在多目标环境下,会出现虚假目标。由此学者提出FMCW-CW、变周期LFMCW、变斜率LFMCW、多进制数字频率调制(MFSK),解决距离和速度匹配问题。MFSK根据相邻波形相位差与频率直接计算得速度与距离,其实时性好,同时解决LFMCW虚假目标问题,本文系统采用该调制方式。
1 MFSK雷达工作原理
MFSK调制雷达实现原理是交替发射两种具有固定频差波形,并且两种频率均是线性阶梯步进,其实质是FSK与LFMCW的结合[9],如图1所示,A、B表示两种不同频率发射波形,其固定频率为fshift,每种波形步进频率间隔为fstep,频率带宽为fsweep。

图1 MFSK调制波形
设发射N个频率步进信号,第i个信号为:
st(i)=A1e-j2π(f0+ifstep)ti=0,1,…,N-1
(1)
其回波信号为:
sr(i)=A2e-j2π(f0+ifstep)t-τ(i)i=0,1,…,N-1
(2)
混频之后N个采样差频信号进行FFT变换和理论推导,可得距离R和速度V存在以下关系:
(3)
(4)
其中f为差频频率,Δφ为A、B相位差,根据公式(3)、公式(4)可知,如果知道f、Δφ即可求得目标的距离和速度信息,而且f、Δφ与距离R和速度V一一对应,由此可知MFSK解决了LFMCW多目标下的虚假目标问题,同时能够直接计算出目标速度、距离相关信息。
2 系统设计
2.1 系统总体框图
雷达信号处理系统主要分为四大部分:雷达射频前端模块、中频信号处理模块、系统电源模块、预报警模块[10-11],雷达射频前端模块负责高频信号收发,并且将回波信号与本振信号经过混频输出中频信号;中频信号处理模块对I、Q两路信号进行放大滤波,信号采集和分析,完成目标距离、速度计算;预报警模块根据预先设置的“门限”判断,如果被判断为 “目标”,则实时地控制报警系统,提醒驾驶者下一步动作,避免不必要的交通事故;电源模块为系统提供稳定的电压值。系统框图如图2所示,系统主要指标技术参数如表1所示,MFSK调制具体参数如表2所示。本文将对雷达射频前端模块以及中频信号处理进行深入研究。
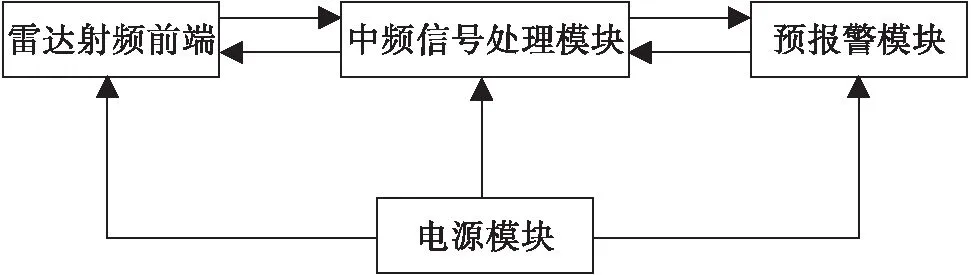
图2 雷达系统总框图
表1 系统指标技术参数
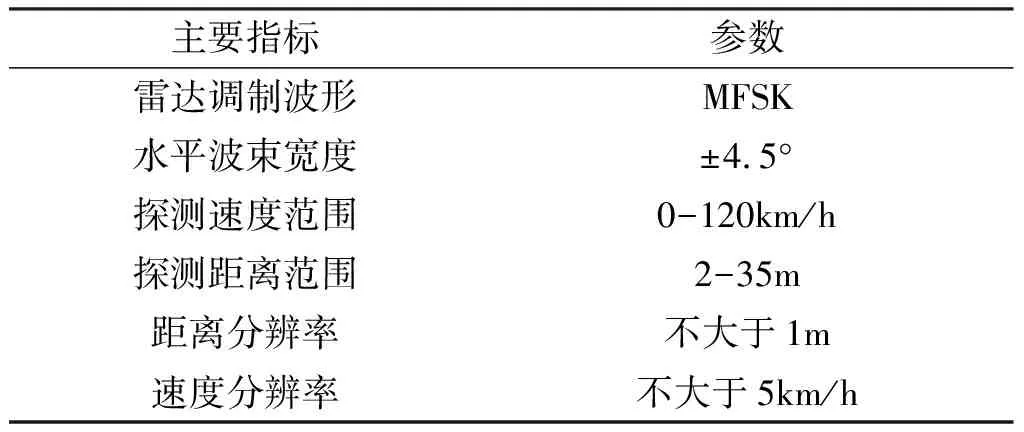
主要指标参数雷达调制波形MFSK水平波束宽度±4.5°探测速度范围0-120km/h探测距离范围2-35m距离分辨率不大于1m速度分辨率不大于5km/h
表2 MFSK调制波形参数
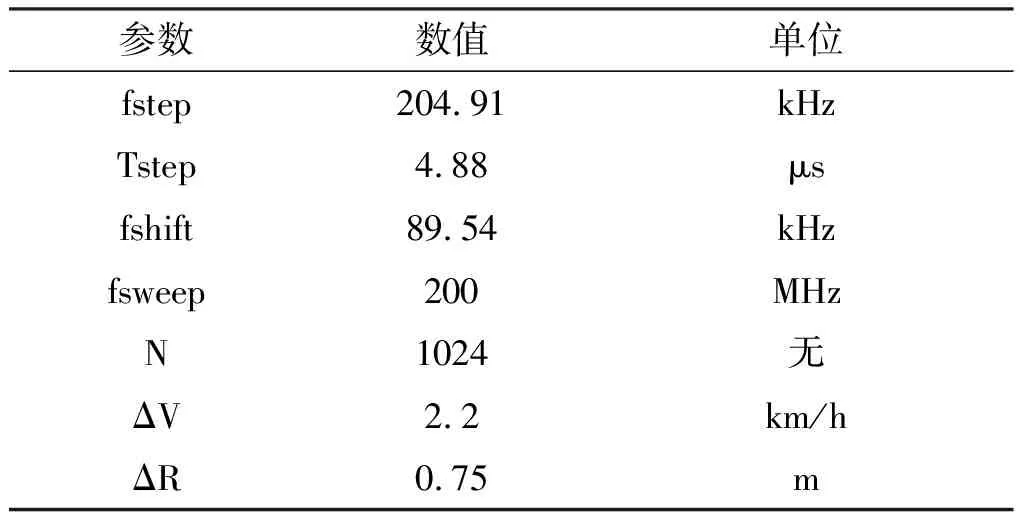
参数数值单位fstep204.91kHzTstep4.88μsfshift89.54kHzfsweep200MHzN1024无ΔV2.2km/hΔR0.75m
2.2 射频前端模块
如图3所示,根据压控振荡器(VCO)频率和电压的输出关系实现波形调制。其中一路经过功放电路处理后,将信号通过天线发射出去,另一路又分流成两路分别进入I、Q通道混频器中,其中Q通道的信号在混频之前还需先经90°的移相;接收天线接收回波信号,先经低噪声放大处理,再分别经混频器与实时分流的两路信号进行混频;混频后得到的信号再经中频滤波放大处理,得到I、Q通道两路中频信号[12-14],最终进入中频信号处理模块。对应其前端芯片选择德国Infineon公司的BGT24MTR11 24GHz雷达前端传感器,以及ADI公司的ADF4158实现MFSK调制。

图3 射频前端模块
2.3 中频信号处理模块
射频前端输出中频信号较弱,一般只达到mv级,所以中频信号处理模块一般包括高通滤波、可变增益控制、低通滤波、A/D采样、STMF303综合处理,如图4所示。放大电路设计为三级级联的形式,第一级、第二级由美国ADI公司的AD8231放大器的差分放大器和运放电路组成,第三级由STM32F303内部的运放组成,第二级、第三级均为同相放大,第二级放大倍数固定为10倍,第一级、第三级放大增益均由程序控制,最高可以实现约87dB的放大增益,在此最大增益下,放大电路带宽约为100kHz,满足本系统的设计要求,具体电路如图5所示。
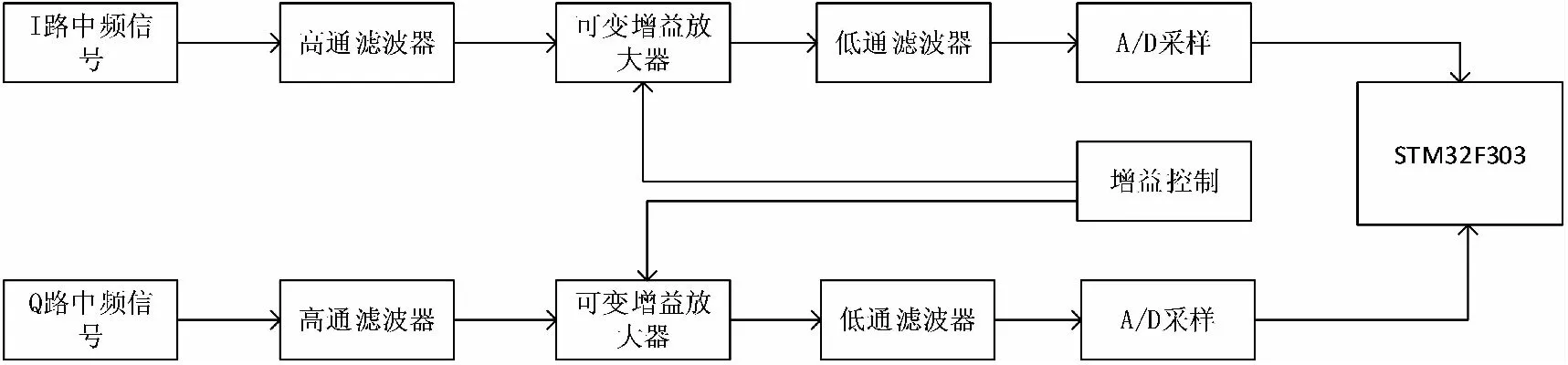
图4 中频信号处理模块

图5 AD8231电路连接图
3 系统功能测试
上位机是人机界面,能够简明直观观察远端现场的变化,通过发出测试操作指令对下位机(雷达系统)进行控制,图6为雷达系统与与上位机连接示意图,图7为上位机CAN通信配置参数。

图6 雷达系统与上位机连接示意图
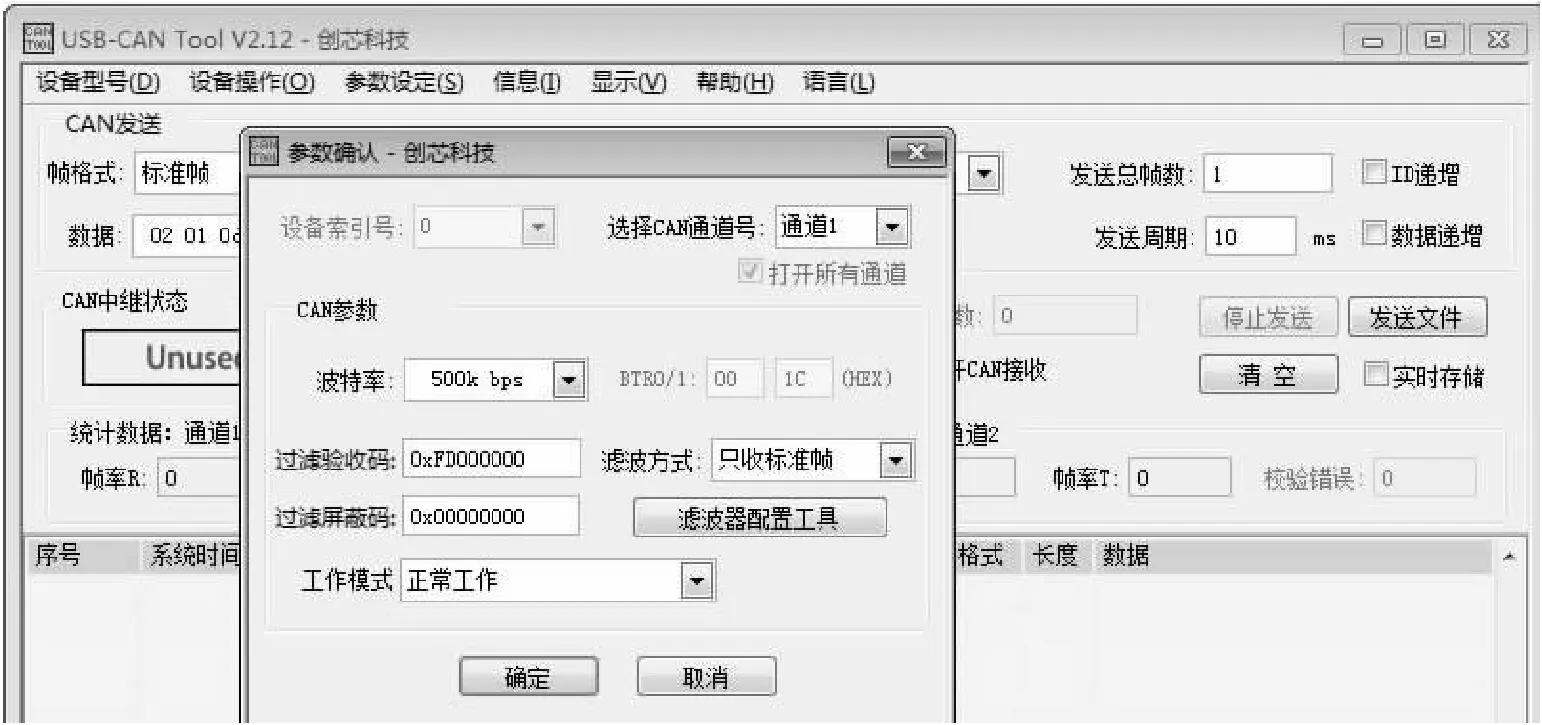
图7 上位机CAN通信配置参数
3.1 室内功能测试
由于测试条件的局限性,本文对雷达与目标(测试人员)相对低速进行测试,分别测出目标在雷达正前方2m、10m、15m处的情况,通过A、B波形对应的频率值、相位值,求出目标的距离,验证系统设计算法的可行性。
表3 2m处目标频率值和相位值
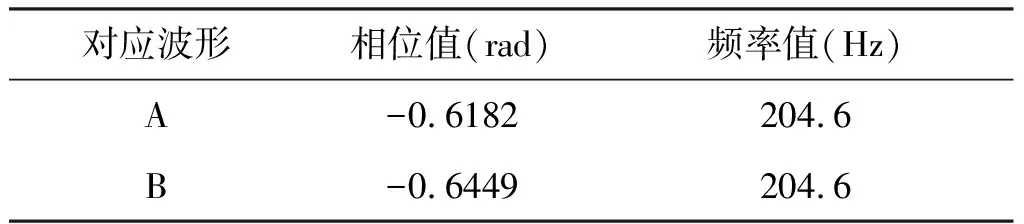
对应波形相位值(rad)频率值(Hz)A-0.6182204.6B-0.6449204.6
表4 10m处目标频率值和相位值
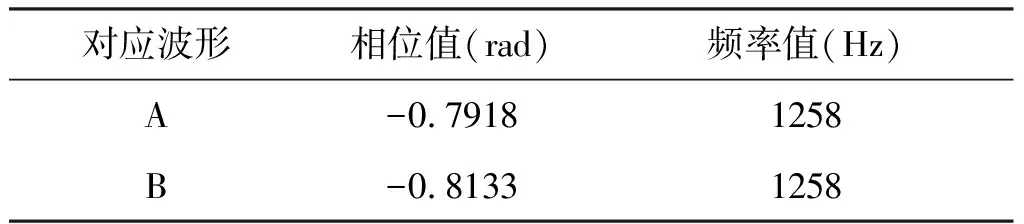
对应波形相位值(rad)频率值(Hz)A-0.79181258B-0.81331258
表5 15m处目标频率值和相位值

对应波形相位值(rad)频率值(Hz)A-0.92171670B-0.99321670
由表3-表5可知,目标的相位差Δφ分别为0.0267rad、0.0215rad、0.0072rad,对应频率f分别为204.6Hz、1258Hz、1670Hz。由公式(3)和公式(4)可分别求得三个目标的距离、速度信息,R1=1.9892m,V1=0.9920m/s;R2=9.8892m,V2=0.3238m/s;R3=15.0892m,V3=0.2485m/s。从测试结果可以看出,三次的测试结果与实际目标距离接近,目标测量距离误差为0.743%,而且距离越远,距离误差百分率越小,实际汽车防撞雷达的测试距离为0~60m,所以其实际测试距离误差小于0.743%。
3.2 室外功能测试
雷达防撞系统安装在小型汽车上的实际的路测情况如图8、图9、图10所示。由图8路测情况显示结果图可知当正后方30m之内有车靠近,判断为存在目标,雷达防撞系统正确捕捉到目标,并且实时正确测出目标的距离以及此时对应的目标速度,此时在上位机的视频窗口将显示出来,如图8所示,目标为黑色小轿车,当前距测试小轿车22.14m,以相对测试车速度51km/h靠近。从图9路测情况显示结果图可知,如果车侧右后方有车行驶,不在正后方的探测范围,则不会视为目标障碍物,即使距离可能在探测距离范围,所以上位机视频框没有显示出该车辆。同样如果测试车左后方有车靠近,不会被判断为移动目标,上位机视频窗口同样没有显示该车辆。

图8 正后方有目标的路测情况

图10 侧左后方有目标时的路测情况
在道路上的实时测试共测五组数据,且规定每组总的显示车辆数为100,然后记录每组的漏报车辆数和误报车辆数,记录路测试验结果如表6所示。
表6 路测试验结果统计表

试验次数漏报车辆数误报车辆数正确预警次数总车辆数误差概率1141001054.76%2451001098.2%3311001043.8%4221001043.8%5331001065.66%
从表6的路测统计可知,汽车防撞雷达系统,其漏报率为2.45%,误报率为2.82%,系统误差最大概率为8.2%,最小误差概率为3.8%,本次测试的平均误差为5.244%。
4 结束语
本文设计一款24GHz MFSK调制雷达盲区监测系统。利用上位机搭建采集数据平台,保存数据,分析数据,对目标的相对距离,相对速度等指标进行分析,验证本系统采取的算法和方案的可行性。由于在室内测试条件的局限,只针对静态目标进行了测试,分别对于雷达距离为2m、10m、15m的有一定速度的行人进行了测试,从三组测试结果验证系统能精确地测试出目标的相对速度和相对距离,验证了整个系统能够满足汽车雷达盲区监测系统的要求。最终将该系统安装在汽车上进行实时路测,从上位机视频窗口的测试结果显示,能够正确测得在测试范围内(汽车正后方,盲区)的所有目标车辆,验证了整个系统设计的可行性。根据路测数据统计,汽车防撞雷达系统,其漏报率为2.45%,误报率为2.82%,系统误差最大概率为8.2%,最小误差概率为3.8%,本次测试的平均误差为5.244%。
猜你喜欢
电子技术与软件工程(2022年6期)2022-07-07
雷达学报(2022年2期)2022-04-30
汽车与驾驶维修(维修版)(2020年2期)2020-03-20
文萃报·周二版(2019年8期)2019-09-10
电子制作(2019年15期)2019-08-27
小雪花·初中高分作文(2019年2期)2019-06-27
航天电子对抗(2019年4期)2019-06-02
小学生学习指导(低年级)(2018年12期)2018-12-29
汽车维护与修理(2018年9期)2018-10-31
小学生导刊(高年级)(2016年11期)2016-11-14
