工业机器人控制技术课程实践教学递进式项目化教学设计
2019-10-12 05:50乔贵方刘娣张颖温秀兰万其
中国教育技术装备 2019年6期
乔贵方 刘娣 张颖 温秀兰 万其


摘 要 首先针对“工业机器人控制技术”实践教学中存在的问题展开分析,然后以六自由度模块化机器人作为实践教学平台,基于递进式项目教学理念设计“工业机器人控制技术”实践教学环节,使学生能够在实践教学中由被动变为主动,从而达到增强实践教学效果的目的。
关键词 工业机器人控制技术;机器人工程;实践教学;项目化教学
中图分类号:G642.3 文献标识码:B
文章编号:1671-489X(2019)06-0126-03
Design of Progressive Project-based Teaching for Practical Course
of Industrial Robot Control Technology//QIAO Guifang, LIU Di, ZHANG Ying, WEN Xiulan, WAN Qi
Abstract Firstly, the existent problems existing in the practical tea-ching steps of the Industrial Robot Control Technology are analyzed in this paper. Secondly, the practical course of Industrial Robot Control Technology based on the concept of the progressive project-based teaching and the practical teaching platform of six degree-of-freedom modular robot is designed presented. This can enable the students to transform passivity into initiative in practical teaching. The purpose of improving the effect of practical teaching can be achieved.
Key words industrial robot control technology; robot engineering; practical teaching; project-based teaching
1 引言
《中國制造2025》[1]以智能制造为主攻方向,指出将大力推动机器人与高档数控机床等重点领域的发展,研究开发高效、精密的基础制造装备。工业机器人作为智能制造装备的代表,高端制造业发展的焦点,其研发、制造与应用成为衡量一个国家科技创新水平的重要标志。随着机器人技术的不断发展,社会对高层次机器人工程师的人才需求也越来越迫切。
为适应社会发展的需要,教育部于2016年设立机器人工程专业,其主要目的是培养从事机器人工作站设计、装调与改造,机器人自动化生产线的设计、应用及运行管理等相关岗位工作,具有较强综合职业能力的高素质应用型专门人才,也是为适应经济发展。“工业机器人控制技术”作为机器人工程专业人才培养方案中的核心课程,理论教学与实践教学的有机融合能够有效地提高教学质量。南京工程学院于2013年招收了第一届自动化(机器人)专业方向的本科生,于2017年招收了第一届机器人工程专业的本科生[2]。
应用型本科院校培养应用型创新人才是国家赋予的使命,应用型创新人才要求具有较强的实践能力和创新能力,因此,实践教学是应用型本科院校人才培养过程中非常重要的教学环节。本文针对专业核心课程“工业机器人控制技术”的教学目标,结合南京工程学院“学以致用”的人才培养理念,设计基于递进式项目化教学的实践教学环节,使学生能够在团队环境中进行探究性的知识学习和技能训练,能够在实践教学中由被动变为主动,从而达到理论联系实际的教学目标,最终实现应用型创新人才的培养目标。
2 课程特点及教学目标
“工业机器人控制技术”是机器人工程专业人才培养方案中的核心课程,课程的教学目标是通过对工业机器人控制系统基本理论和最新进展的介绍,使学生能够掌握工业机器人运动学和动力学模型、机器人控制基础、机器人轨迹规划及机器人智能控制技术等。该课程包含理论教学和实践教学,其中实践教学环节着重培养学生的实践操作能力和知识应用能力,使学生能够在学习机器人专业理论知识的基础上,更加深刻地理解机器人的系统组成及工作原理。
机器人控制技术是自动控制、计算机和机械工程等多学科的交叉融合,要求学生具有完整的知识体系。在应用型本科院校中,与研究生阶段的相关课程相比,“工业机器人控制技术”课程更注重实践应用能力的培养,要求学生能够掌握机器人系统结构与常规的控制方法,了解智能控制方法;而与高职院校的相关课程相比,“工业机器人控制技术”课程更注重理论知识的讲解,要求学生能够更好地掌握控制理论基础知识,具备提出问题、分析问题和解决问题的能力。而实践教学设计的合理与否将影响学生技能的训练与知识的掌握,进而导致应用型本科院校的教学特点缺失。
3 传统实践教学模式的问题分析
实践教学是培养学生实践能力的主要途径和措施,是应用型本科院校实现人才培养目标的重要教学环节。目前,实践教学主要分为实验、课程设计、实习和毕业设计等多种形式,但多年来在高等教育中一直存在“重理论轻实践”的观念,出现许多问题[3-4]。
课程方案中对实践教学环节突出不足 实践教学环节突出不足,首先体现在其在课程方案中所占的课时与学分比例较少;其次在于传统教学模式的观念导致教师和学生对实践教学不够重视,教师对实践教学模式与内容设计单一,无法引起学生的兴趣,导致学生主动参与意识不强。
实践教学和理论教学目标及社会需求存在偏离 实践教学的内容不能与理论教学目标相互呼应,从而导致学生无法通过实践教学进一步理解理论教学的重难点;应用型本科院校的实践教学中应更好地体现当前社会与相关企业的人才需求,从而提高学生的就业竞争力。但由于实践教学资源的不足,教师的工程实践能力不足,都导致实践教学与社会需求的偏离,进一步降低学生的积极性。
4 递进式项目化教学的实践教学设计
为解决以上提出的问题,本文以“工业机器人控制技术”为例,基于递进式项目化教学理念设计该课程的实践教学环节[5]。
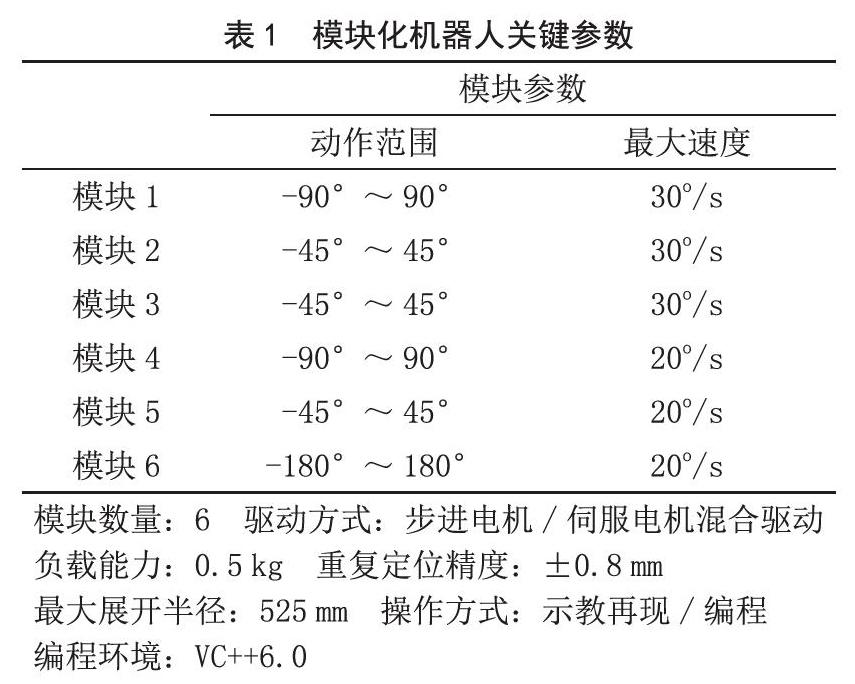
实践教学平台概述 “工业机器人控制技术”的实践教学环节主要利用图1中的六自由度模块化机器人所搭建的机器人实验平台,该机器人系统主要包括机器人本体一台、电气控制柜一台、机器人控制软件一套。六自由度模块化机器人采用模块组合式串联开链结构,机器人各连杆由旋转关节模块串联连接,各模块的传动采用可视化结构,由锥齿轮、同步齿型带和谐波减速器等多种传动结构配合实现。机器人的各个关节模块采用步进电机或伺服电机驱动,通过Windows环境下的软件对机器人进行控制,使机器人任意组合成2~6自由度机器人,能够在其相应的工作空间完成指定工作任务。该机器人的技术参数如表1所示,能够完成六自由度工业机器人的基本作业功能,满足实践教学的需要。
递进式项目化实践教学设计 递进式项目化实践教学依据“工业机器人控制技术”的理论教学重难点的层次,分为初级阶段、中级阶段与高级阶段三个层次的项目,三个实践教学阶段共规划10项不同难度和类型的项目,如表2所示。每个阶段的项目都支撑着不同的理论教学重难点。
初级阶段的项目以教师引导为主。通过教师的教授,系统地为学生介绍工业机器人系统结构、技术参数以及相关的数学基础,使学生能够建立本课程的基本知识框架。学生对六自由度模块化机器人示教编程、协作装配等操作,能够进一步了解工业机器人操作方法与运动特点,为后续理论学习与实践操作打下基础。
教师在中级阶段的项目中逐渐摆脱主导地位,在实践教学过程中突出学生的主体作用,实践教学内容向更高层次的知识与工程应用扩展。在初级阶段的基础上进一步完成机器人关节空间控制与运动学正逆解编程。中级阶段的實践教学内容主要支撑理论教学中的机器人线性控制方法、DH模型以及运动学正逆解计算。
学生的主体作用在高级阶段进一步加强。实践教学中的项目规划应注重学生综合能力的培养,同时要支撑理论教学中关节空间与笛卡尔空间的轨迹规划方法。在实验平台所提供的软硬件资源上实现直线插补、圆弧插补以及点到点运动等编程项目。通过本阶段的学习,学生能够理解工业机器人控制系统的实现方法。
递进式项目化教学组织与考核 在项目化教学过程中,项目组结构、项目任务分配以及考核管理的合理性将影响实践教学的效果。
1)项目组的结构。以六套机器人实验设备为基础,单个班级的学生有40个,将学生分为两个批次,每个项目组由一个负责人、2~3个组员构成。每个小组一般由不同类型的学生构成,形成异构的组内成员,以保证其组员的多样性。
2)项目组任务分配。在实践教学实施过程中,应充分考虑学生的自身特点以及项目支撑的理论知识点进行任务分配。其中,初级与中级阶段的项目要求所有学生必须完
成;而高级阶段项目应根据组员在前期项目的完成效果和效率进行任务分配,并且每个项目组至少完成其中一个项目。不同组完成相同项目时,其具体的技术指标应不同。
3)项目组考核。随着实践项目阶段的逐渐推进,项目的完成难度和所占比重也逐步递增,在实践考核中的比重也应该进行调整。各个阶段应重点考虑过程考核,其中实践操作与答辩验收各占30%。具体的项目阶段考核以及实践总评如表3所示。
5 结语
本文基于递进式项目化教学理念设计“工业机器人控制技术”的实践教学环节。递进式项目化教学的开展能够使学生进一步理解工业机器人控制技术的基本概念,深化理论教学的重难点,引导学生能够将相关理论知识应用于项目开发,充分锻炼学生的综合分析与知识应用能力,有效地提高实践教学的质量。与此同时,提高学生的自学、文献调研与整理等方面的能力。■
参考文献
[1]工信部装备工业司.《中国制造2025》推动机器人发展[J].机器人技术与应用,2015(3):31-33.
[2]刘娣,刘坤,温秀兰.应用型本科工业机器人控制课程教学改革[J].中国教育技术装备,2017(4):97-99.
[3]刘扭参.地方应用型本科高校实践教学问题研究[J].吉林省教育学院学报,2017,33(1):31-33.
[4]聂立新,赵明利.高校工科专业实践教学问题的分析与研究[J].中国现代教育装备,2010(3):153-155.
[5]郭亮,张建新,王俊茹.递进式《传感器原理及应用》课程项目化改革与实践[J].价值工程,2018,37(3):256-258.
猜你喜欢
旅游世界·旅游发展研究(2016年3期)2016-12-12
新教育时代·教师版(2016年26期)2016-12-06
新教育时代·教师版(2016年26期)2016-12-06
商情(2016年40期)2016-11-28
知音励志·社科版(2016年8期)2016-11-05
科技视界(2016年18期)2016-11-03
大学教育(2016年9期)2016-10-09
大学教育(2016年9期)2016-10-09
大学教育(2016年9期)2016-10-09
科技视界(2016年20期)2016-09-29