
空间重复锁紧技术综述
2019-10-12 08:49杨泽川罗汝斌廖鹤廖俊罗世彬蒋祎袁俊杰王宁
航天返回与遥感 2019年4期
杨泽川 罗汝斌 廖鹤 廖俊 罗世彬 蒋祎 袁俊杰 王宁
空间重复锁紧技术综述
杨泽川1罗汝斌2廖鹤3廖俊1罗世彬1蒋祎1袁俊杰1王宁1
(1 中南大学航空航天学院,湖南长沙 410083)(2 北京宇航系统工程研究所,北京 100076)(3 上海卫星工程研究所,上海 200235)
重复锁紧技术是空间飞行器上的关键技术,用于实现飞行器可分离结构与固定结构之间的重复锁紧与分离。文章对各国在空间站、飞船和卫星等空间飞行器上所用到的重复锁紧技术进行了概述,详细阐述了机械式锁紧、记忆合金式锁紧、电磁式锁紧技术的研究进展,对比了不同锁紧方案的优劣;展望了不同重复锁紧技术在未来应用中的发展趋势和前景,为空间重复锁紧技术的选择及发展提供了参考。
机械式锁紧 记忆合金式锁紧 电磁式锁紧 重复锁紧技术 航天器机构
0 引言
随着空间探测、开发和利用的不断深入,人类通过航天器探测太空的次数越来越多,航天器上需要用到大量的重复锁紧技术去实现分离件与其他部件的多次锁紧与分离,如:火箭的级间分离、有效载荷的分离释放、空间站对接、飞船舱门、太阳翼、天线部署等[1]。空间的重复锁紧机构既要保证在连接时的安全可靠,更要保证在分离时快速作动。在早期的航天器上使用的锁紧释放方法是火工技术,但是火工产品爆炸产生的冲击会对精密的设备仪器等带来损坏,并使航天器产生飞行故障[2-3]。
由于火工技术的局限性,低冲击、零污染、可重复使用的新型重复锁紧释放技术在近几十年得到快速发展[4]。本文根据空间对接、飞船和卫星上所用到的众多重复锁紧机构进行解析,如图 1所示,按照重复锁紧类型的不同,可将其分为机械式、记忆合金式、电磁式等,针对不同类型的锁紧方式,对其结构原理进行阐述比较,为重复锁紧装置的选择以及发展提供了参考。

图1 空间重复锁紧技术分类
1 机械式锁紧机构
机械式重复锁紧机构大多用于大型轨道飞行器,不同的飞行任务所使用的重复锁紧机构的类型也不相同,在空间站对接、飞船的货盘锁紧以及航天飞机舱门中广泛使用[5]。根据执行机构不同,可以将机械式锁紧机构分为锁钩式、卡爪式和螺栓–螺母式。
1.1 机械式锁紧机构原理
(1)锁钩式锁紧方式
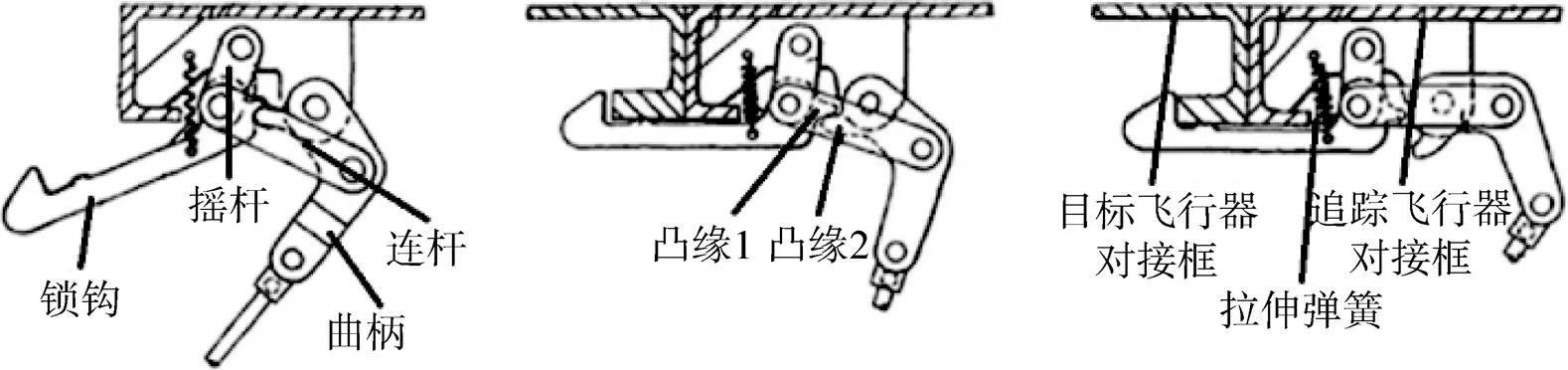
偏心轮加凸轮机构和滚珠丝杆加弹簧机构是锁钩式常用的两种方案[6],如图2所示,对于偏心轮加凸轮机构,偏心轴机构使得锁钩上下直线运动,摆动凸轮机构使得锁钩摆动。对于滚珠丝杆加弹簧机构,滚珠丝杆带动螺母沿着滑槽向下,弹簧的推力使锁钩摆正,主动锁钩啮合锁紧对应的被动锁钩。根据应用场合不同,分为空间对接、舱门锁紧、货盘锁紧。
(2)卡爪式锁紧方式
卡爪式结构如图 3所示,包括待锁紧轴及卡爪机构。主动飞行器上安装卡爪机构,目标飞行器上安装待锁紧轴,当卡爪伸到待锁紧轴时,卡爪卡住待锁紧轴,然后拉紧,压在接纳元件槽中实现锁紧。通过使用摄像机及光学敏感器来判断主动飞行器及目标飞行器的实时方位,但需要初始对接条件高度精确[6]。

(a)偏心轮+凸轮机构 (b)滚珠丝杆+弹簧机构
(3)螺栓–螺母式锁紧方式
NASA研究的螺栓–螺母式锁定机构由改造的无刷直流电机驱动螺栓轴向移动[7]。波音公司的锁定机构[8](如图4)在锁紧时专用电机驱动螺栓转动,螺栓在螺纹副作用下向前旋进并拉紧对接组件。刘晓东等[9]设计了一款用于锁紧磁悬浮飞轮的螺栓–螺母结构锁,需要高度密封,同时对组件的初始位置要求较高,传动效率较低,作动时间较长[10]。

图3 欧空局锁紧机构

图4 螺栓–螺母式结构锁
Fig.4 Bolt-nut type structure lock
1.2 机械式锁紧的应用
(1)空间对接
美国宇航局(National Aeronautics and Space Administration, NASA)的“阿波罗”飞船上最早应用锁钩式锁紧[11],如图5所示[12],该锁结构简单、方便操作,但是没有备份设计,可靠性低[10]。
(a)解锁状态 (b)锁紧过程 (c)锁紧状态
相对于NASA早期对接锁,“联盟号”飞船上的对接锁[13]可以在紧急情况下备份分离,提高了飞船对接后分离的可靠性。但该锁的备份分离需要大量的活动构件,大大降低了稳定性和可操作性。
欧空局(European Space Agency,ESA)的卡爪式机构[14]对姿态控制要求较高,由于初始对接条件及传感器的设计要求较高,该对接装置还受一定限制[10]。日本也提出了类似ESA的对接方案[15],可在对接或停靠两种对接方式下工作,适应性强且智能化高,并完成了两次在轨对接与分离试验。
(2)舱门锁紧
文献[5]为可重复使用轨道飞行器设计舱门锁紧机构,传动组件驱动输入轴带动锁钩压紧被锁紧轴,曲柄摇杆机构为死点位置,预紧更加可靠[16],并加工出样机(如图6),具有质量更轻且结构可靠的优势。
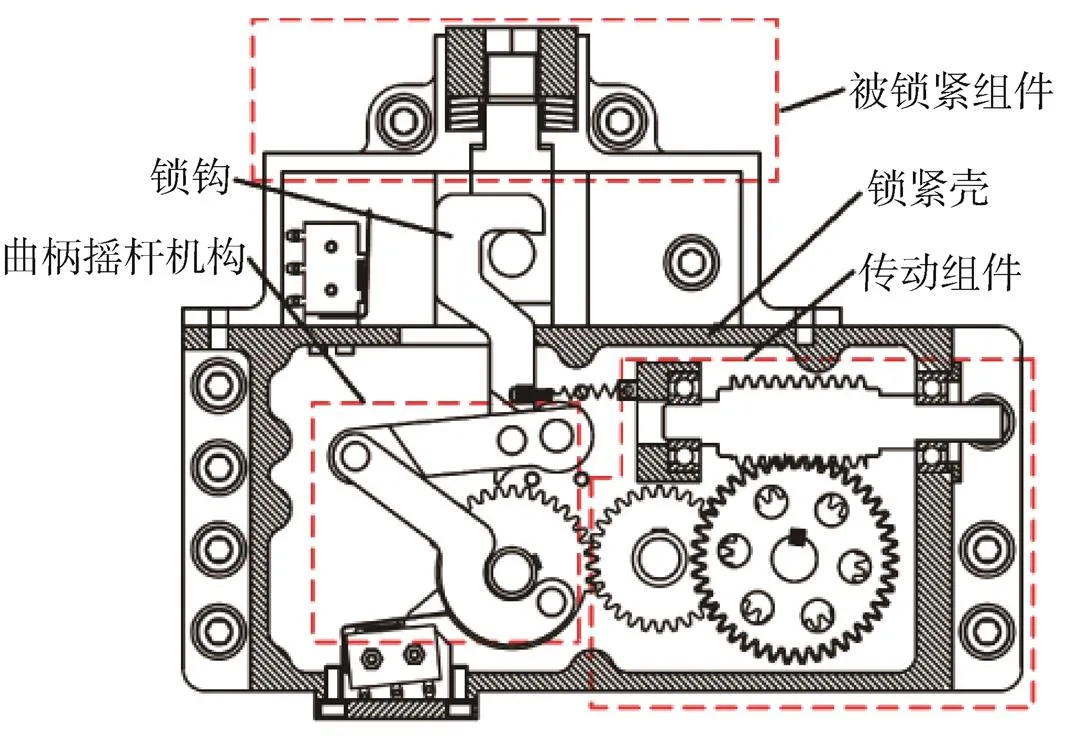
图6 舱门锁示意
(3)货盘锁紧
日本的货运飞船(H-II Transfer Vehicle,HTV)采用单锁钩结构,锁钩的开合由软轴驱动,经过两次飞行任务验证,达到预期要求[17-18]。文献[12]针对货运飞船的货盘大承载锁紧技术进行研究,该装置是锁钩–四杆式机构,并加工出试验样机。
1.3 机械式锁紧对比
机械式重复锁紧机构多用于恶劣的空间环境,表 1给出了不同机械式锁紧机构的对比,其中作动时间短、具备大承载、抗冲击的机构更具优势。
表1 不同机械式锁紧机构综合比较

Tab.1 Comprehensive comparison of different mechanical locking mechanisms
2 记忆合金式锁紧方式
记忆合金式锁紧释放装置是利用形状记忆合金(shape memory alloy,SMA)设计的驱动器驱动的锁紧解锁装置,形状记忆合金作为驱动元件具有结构简单,变形量大,能产生大的回复应力,控制简单等优点,根据其形状记忆效应,达到重复驱动锁紧的目的[19-21]。根据驱动单元中SMA的不同形式,可以将其分为SMA丝驱动、SMA棒驱动、SMA弹簧驱动的锁紧释放装置。
2.1 记忆合金式锁紧释放原理
(1)SMA丝驱动的锁紧释放装置
SMA丝驱动的锁紧释放装置是由SMA丝形成的驱动器驱动,根据锁紧解锁机构原理的不同,可以将其分为SMA丝驱动的分瓣螺母型装置和钢球锁紧型装置。分瓣螺母型装置在锁紧状态时,箍环结构箍紧分瓣螺母形成完整螺纹,螺栓拧入螺纹实现锁紧;分离时,SMA丝驱动箍环,分瓣螺母的径向约束解除,分瓣螺母分开成螺母瓣,完成对螺栓释放[22]。钢球锁紧型装置在锁紧时,利用钢球限制分离销的轴向自由度,达到锁紧目的。分离时,SMA丝驱动器推动钢球掉入凹槽,解除分离销的约束,完成分离。
(2)SMA棒驱动的锁紧释放装置
SMA棒驱动的锁紧释放装置式利用形状记忆合金产生的恢复力和形变直接驱动锁紧释放装置,通电后对形状记忆合金棒加热,达到相变温度点后,使记忆合金棒伸长,从而带动锁紧释放机构。由于记忆合金棒体积较大,需加热久,所以响应时间较长。
(3)SMA弹簧驱动的锁紧释放装置
SMA弹簧是由SMA丝制成的螺旋弹簧元件,可以实现弯曲等复杂动作,与普通弹簧相比,输出力较大,使得运动行程也更大,所以作为触发元件,还需设计相应的作动装置。
2.2 记忆合金式锁紧装置应用
(1)SMA丝驱动的分瓣螺母型装置
北京航空航天大学的大载荷SMA锁紧释放装置(SMA-30000)[23],如图 7所示,在箍环和分瓣螺母间设置多组滚棒,滚棒在分离过程中保证套筒与分瓣螺母间的滚动运动,SMA丝直接驱动箍环,实现释放。

图7 SMA-30000锁紧释放装置
KAIST(Korea Advanced Institute of Science and Technology)装置(图8(a))在释放时,SMA丝带动触发块,钢球掉入凹槽中,滚棒向上移动,使分瓣螺母分离,螺栓松开释放[24]。QWKNUT(QWK-nut)装置(图8(b))采用旋转触发和滚棒减磨结构,释放时,SMA丝驱动栓臂解除对转轮的约束,弹簧驱动转轮旋转,滚棒被推入凹槽中,分瓣螺母约束解除,完成释放[25-26]。
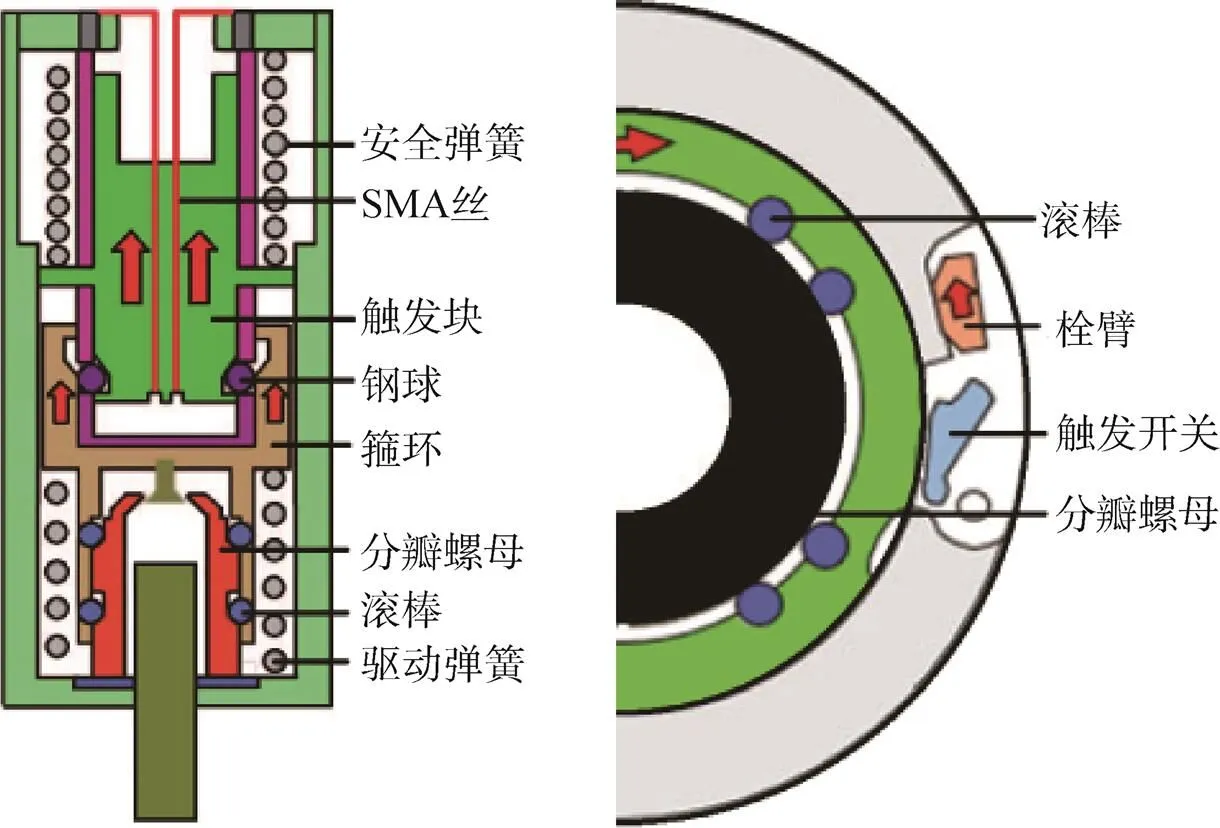
(a)KAIST装置 (b)QWKNUT装置
表2给出了SMA丝驱动分瓣螺母型装置性能,其中SMA-30000装置采用冗余的SMA丝设计,可靠性高,释放载荷大,该装置已经在我国XY-1卫星上完成飞行验证,但是SMA丝较粗,作动时间较长,多个滚棒也增加了结构的复杂性[4]。而KAIST装置结构复杂,仅开展了地面热、力学环境试验。QWKNUT装置在FalconSat Ⅰ飞船成功完成飞行测试,但是结构过于复杂,对加工制造尺寸和形位公差要求高,受加工影响较大[4]。
表2 SMA丝驱动分瓣螺母型装置性能

Tab.2 SMA wire drive split nut type device performance
(2)SMA丝驱动的钢球锁紧型装置
意大利那不勒斯第二大学(Second University of Naples Via Roma,SUNVR)利用3根SMA丝驱动单级钢球锁套筒运动,完成对分离销的释放,该装置结构简单,采用3根SMA丝,实现冗余驱动,可靠性高(图9(a))[27]。韩国航天大学(Korea Aerospace University,KAU)研制了利用SMA丝驱动二级钢球锁的重复锁紧装置(图9(b))。分离时,SMA受热变形拉动触发块下移,限位套旋转,钢球落入槽中,解除限位,完成释放[28]。
北京航空航天大学的SMA-10000装置(图10),解锁时,加热SMA丝发生收缩形变,并拉动触发块使下滚珠掉入凹槽内,限位套向下移动,上滚珠掉入凹槽,使得分离销释放[22, 29]。REACT装置(Release Actuator)是三级钢球锁紧装置,释放时,触发环在SMA丝驱动下转动,三级钢球发生连锁运动,分离销限位解除完成释放[30]。
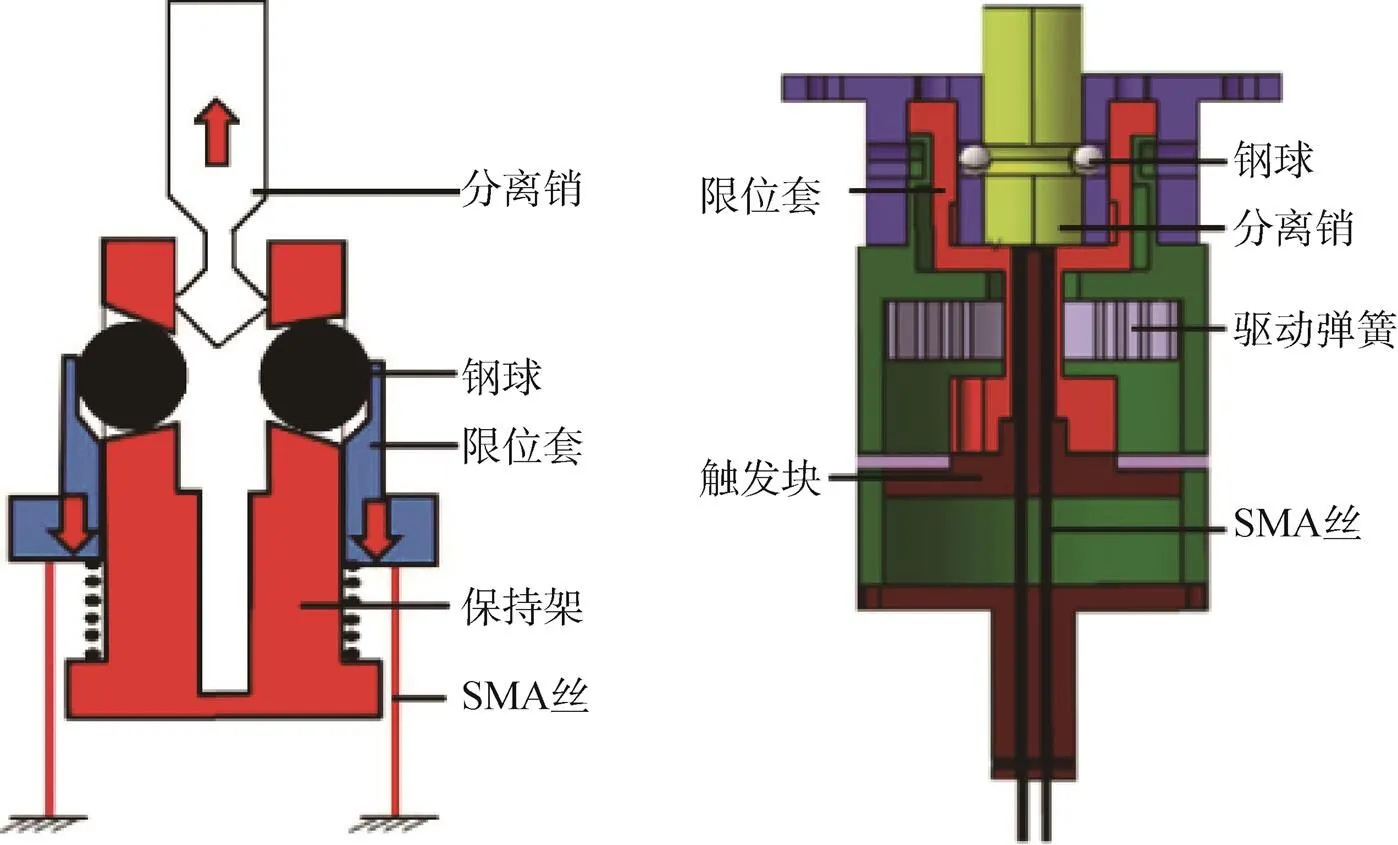
(a)SUNVR装置 (b)KAU装置
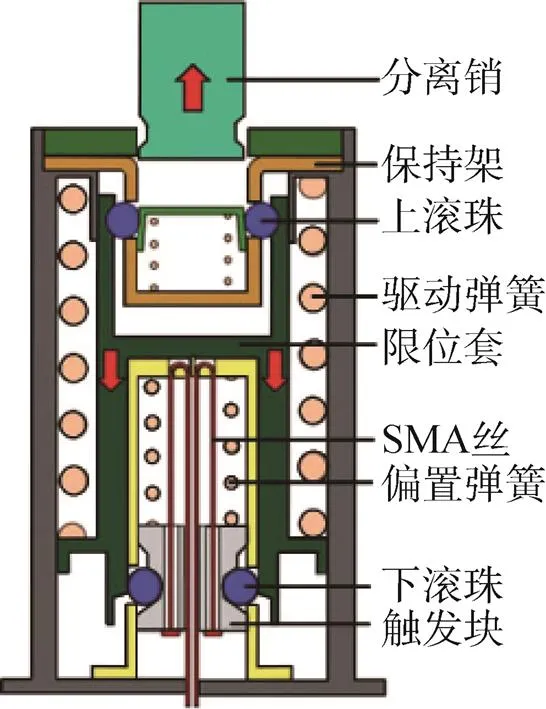
图10 SMA-10000装置
表3是SMA丝驱动的钢球锁紧型装置性能,SUNVR装置是单球锁,承载力小,适合于小型负载场合;KAU装置采用涡卷弹簧驱动,导致力矩较小,释放载荷较小,因此限制了其应用;这两款装置仅在地面进行过测试。而SMA-10000装置已经完成了1kN到10 kN多个载荷系列研制,通过了多次在轨飞行验证,该装置采用二级钢球锁紧,衰减了分离销传到驱动器上的力,可以释放大载荷,扩宽了其应用。REACT装置引入第三级钢球锁,进一步衰减了分离销传来的载荷,但也增加了装置的复杂度,可靠性受到一定影响。
表3 SMA丝驱动的钢球锁紧型装置性能

Tab.3 SMA wire driven steel ball locking device performance
(3)SMA棒驱动的锁紧释放装置
NASA是较早将SMA棒应用于航空航天领域的机构之一,如图 11所示,解锁时,加热SMA棒,到达形变温度时,使其伸长,活塞因此运动,并且活塞的凸台与分离螺母的凸台慢慢脱开,分瓣螺母的径向约束解除,完成释放[21]。
HSTC(Hi Shear Technology Corporation)装置解锁时,加热SMA棒使其变形,于是加载螺栓卸载,使得箍环上的摩擦力下降,当小于驱动弹簧推力时,弹起箍环,完成释放(图 12)[31]。洛克希德马丁导弹与空间公司(Lockheed Martin Missile and Space, LMMS)的LMMSC装置采用两根预拉伸SMA棒,曾用于空间飞行器上太阳翼展开及天线的释放[32]。

图11 NASA装置
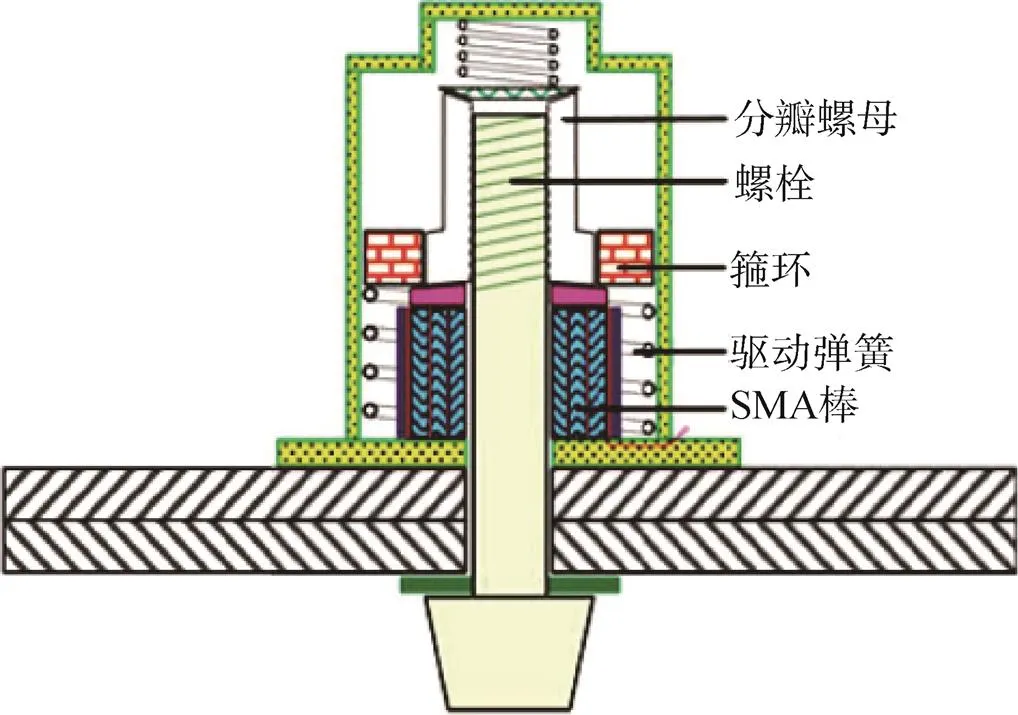
图12 HSTC装置
表4是SMA棒驱动的锁紧释放装置性能,NASA装置和HSTC装置结构简单可靠、承载大,但由于采用了体积较大的SMA棒,导致加热功耗过大、耗时长。LMMSC装置冲击极小、接口灵活、易于制造,但是装置承载能力差,解锁分离时间较长。然而HTSC装置和LMMSC装置难以完成精确控制,也限制了其应用场合[33]。
表4 SMA棒驱动的锁紧释放装置性能

Tab.4 SMA rod driven lock release performance
(4)SMA弹簧驱动的锁紧释放装置
韩国航空航天大学研发的KAU 1装置,如图 13所示,在分离阶段时,加热SMA弹簧使其收缩,限位块移动,在分离弹簧作动下完成分离,可用于微小卫星等场合[33]。
洛克希德马丁公司的LFN(Low Force Nut)装置通过加热SMA弹簧来移动解锁套筒,解除对分瓣螺母的径向约束,同时释放螺栓实现分离(图 14)。与LFN相比,TSN(Two-Stage Nut)能承受更大的预加载荷,输出振动也更低。这两种装置都在MightySat Ι星上完成了在轨分离测试[34]。表 5是SMA弹簧驱动的锁紧释放装置性能,KAU 1装置与洛克希德马丁公司的装置在承载力、冲击及释放时间方面相差较大。

图13 KAU 1装置
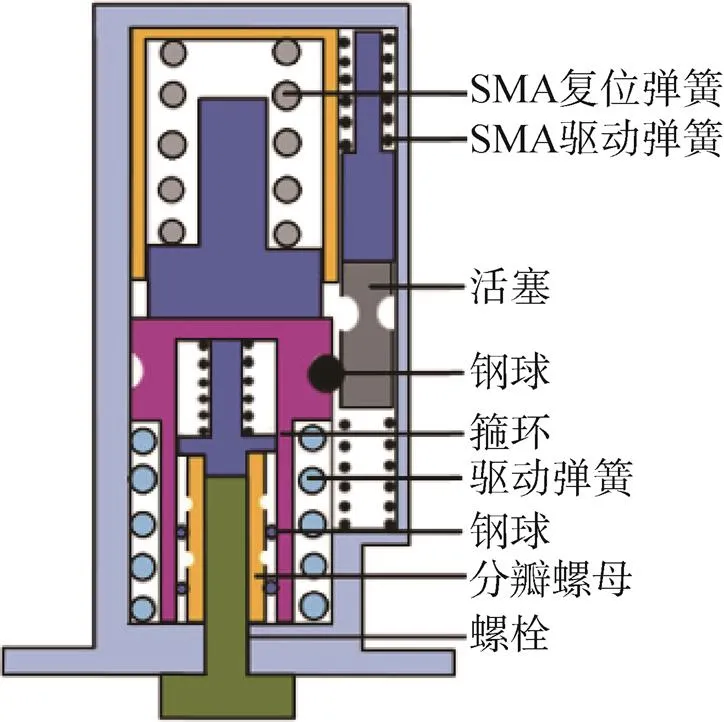
图14 LFN装置
表5 SMA弹簧驱动的锁紧释放装置性能

Tab.5 SMA spring-driven locking release performance
2.3 记忆合金式装置对比
在上文对不同类型的记忆合金原理及结构分析的基础上,表 6给出了不同类型的综合对比,从目前使用情况来看,SMA丝驱动的锁紧释放机构由于可以快速低功耗操作、装置轻巧,发展较快,应用范围较广。
表6 不同记忆合金式装置综合比较

Tab.6 Comprehensive comparison of different SMA devices
3 电磁式锁紧技术
电磁式锁紧的原理是控制锁紧机构中电磁铁产生的磁场与磁路中永磁体产生的磁场叠加,或者是利用电磁装置产生的电磁吸力,达到重复锁紧的目的。磁悬浮飞轮结构在卫星发射阶段需要锁紧保护,而卫星入轨后需要释放才能正常工作[35],根据磁钢放置的位置不同,可将其分为显式电磁式锁紧机构和隐式电磁式锁紧机构[36]。国外在21世纪初提出空间电磁对接概念,可以实现柔性对接,具有非接触控制能力,极具优势。
3.1 显式/隐式锁紧机构
如图15所示,显式电磁锁紧机构在准备解锁时,电磁铁产生与永磁体磁场方向相同的磁场,从而吸住吸盘;当传感器监测为锁紧状态时,电磁铁被停止供电,不再产生磁力,锁紧机构利用自锁和永磁体产生的磁力保持锁紧状态[35]。
在锁紧位置时,磁钢产生的漏磁磁场一直对右侧的吸盘具有吸附力,造成解锁情况下的残余力极小值超过范围,在某些条件下会使机构解锁失效[36]。隐式电磁式锁紧机构指将磁钢内置,消除了锁紧状态下锁紧机构永磁磁路漏磁对吸盘的吸力,从而保证解锁的可靠性。
3.2 空间电磁对接
空间电磁对接是指空间飞行器上的电磁装置产生电磁力(也叫星间电磁力)来控制飞行器之间的相对运动完成交会对接[37],理论上可使对接接触速度控制到零,避免“硬对接”,实现柔性对接。目前国外部分科研单位及高校进行了相关研究[37-40],而国内仅国防科技大学进行了初步地面试验[41]。

图15 显式电磁式锁紧机构结构示意
4 结束语
4.1 发展趋势
1)随着空间往返飞行器的大力发展,针对航天飞船及空天飞机中所用到的货盘锁紧及舱门锁紧技术有了更高的要求,需要更大承载、更低冲击的重复锁紧机构,保证其顺利高效完成重复锁紧任务。对于空间飞行器所用到的对接锁,需要作动快、相对误差极低,因此高度智能化及高可靠性是其发展趋势。
2)对于记忆合金式锁紧装置,大都用于卫星、太阳能翼等结构上,虽然其冲击小、无污染,但是不适用于其他大应力和大位移的场合。针对不同形式的驱动源,加热效率不同,响应时间也不同,需要提高记忆合金式锁紧装置的作动效率,保证快速响应,快速完成锁紧、释放任务。同时在保证设计要求的同时,要充分考虑锁紧释放装置的可靠性。
3)太空环境复杂,射线较多,对电磁锁紧的影响较大,因此需要在设计和研发过程中充分考虑到电磁锁紧装置的密封性,或者在电磁锁紧中增加备用的锁紧分离装置,从而保证在航天任务中顺利完成重复锁紧要求。
4.2 前景
空间飞行器执行航天任务时,大都需要锁紧及释放其分离结构,对于大型机械式锁紧,需要作动快、大承载、低冲击和可靠性高的锁紧释放机构。而对于记忆合金式装置,未来需要向着大应力和大位移的场合应用发展,同时要寻找性能更加优良的记忆合金作为驱动器。电磁锁紧技术的创新性强,受环境因素的影响较大,需要对其可控性进行有效论证。无论哪种重复锁紧技术,都需要作动快,响应迅速,锁紧分离可靠性高,才能保证航天任务的准确快速完成。
[1] 高滨. 形状记忆合金在航天器分离机构上的应用[J]. 航天返回与遥感, 2005, 26(1): 52-56.GAO Bin. Shape Memory Alloys and Their Application to Aerospace Separation Mechanisms[J]. Spacecraft Recovery & Remote Sensing, 2005, 26(1): 52-56. (in Chinese)
[2] DENOYER K K. Lessons Learned from 20th Century AFRL Smart Structures Space Experiments[M]. 2000: 104-115.
[3] 高滨. 火工驱动分离装置的应用[J]. 航天返回与遥感, 2004, 25(1): 59-63.GAO Bin. Application of Pyrotechnically Actuated Devices [J]. Spacecraft Recovery & Remote Sensing, 2004, 25(1): 59-63. (in Chinese)
[4] 闫晓军, 苏宁, 张小勇, 等. 采用形状记忆合金驱动的空间压紧释放装置研究进展[C]// 第二届中国航天空天动力联合会议. 大连, 2017. YAN Xiaojun, SUN Ning, ZHANG Xiaoyong, et al. Research Progress of Space Compression Release Device Driven by Shape Memory Alloy[C]//The 2nd JCAP. Dalian, 2017. (in Chinese)
[5] 周少程. 轨道飞行器舱门可重复锁紧机构的研制[D]. 哈尔滨: 哈尔滨工业大学机械工程学院, 2014: 1-26.ZHOU Shaocheng. The Design and Analysis on Reusable Latch Mechanism for Orbiter Door[D]. Harbin: Harbin Institute of Technology. School of Mechatronics Engineering, 2014: 1-26.(in Chinese)
[6] 高海波, 杨文玉, 熊有伦. 空间对接机构结构锁传动原理分析[J]. 上海航天, 2001, 18(4): 15-18.GAO Haibo, YANG Wenyu, XIONG Youlun. Analysis on the Transmission Principles of Structural Latches of Docking Mechanisms[J]. Aerospace Shanghai, 2001, 18(4): 15-18. (in Chinese)
[7] MCCOWN W, BENNETT N. Structural Latches for Modular Assembly of Spacecraft and Space Mechanisms[R]. California: Rexnord Aerospace Mechanisms, 1988: 20-22.
[8] MEHRINFAR M, SMUDDE P. Compliant Joints for On-orbit Remote Berthing and Structural Attachment of Large Space Structures[C]//54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics & Materials Conference. Boston, US, 2013: 35-38.
[9] 刘晓东, 余立辉. 磁悬浮飞轮自动锁紧系统的研制[J]. 机械与电子, 2007(3): 33-36. LIU Xiaodong, YU Lihui. Development of Automatic Locking System for Magnetic Bearing Flywheel[J]. Machinery and Electronics, 2007(3): 33-36. (in Chinese)
[10] 曹鹏, 刘志全. 空间对接组件中的结构锁及其传动系统[J]. 航天器工程, 2003, 12(1): 41-46.CAO Peng, LIU Zhiquan. Structural Lock and Its Transmission System in Space Docking Assembly[J]. Spacecraft Engineering, 2003, 12(1): 41-46. (in Chinese)
[11] BELEW R R. Docking Structure for Spacecraft: US, 3737117[P]. 1971-06-06.
[12] 王宇兵. 货运飞船货盘重复锁紧机构的设计与分析[D]. 哈尔滨: 哈尔滨工业大学机械工程学院, 2013: 1-22.WANG Yunbing . Design and Analysis on Reusable Latch Mechanism of Cargo Ship Pallets[D]. Harbin: Harbin Institute of Technology. School of Mechatronics Engineering, 2013: 1-22.(in Chinese)
[13] 娄汉文. 空间对接机构[M]. 北京: 航空工业出版社, 1992: 1-20. LOU Hanwen. Space Docking Mechanism[M]. Beijing: Aviation Industry Press, 1992: 1-20. (in Chinese)
[14] 娄汉文, 张柏楠. 空间对接机构的技术发展[J]. 航天器工程, 1994, (3): 1-22. LOU Hanwen, ZHANG Bailan. Technical Development of Space Docking Mechanism[J]. Spacecraft Engineering, 1994, (3): 1-22.
[15] ENDO E, MITSUMA H, TANIGUCHI Y, et al. Berthing and Docking Mechanisms for Future Japanese Space Structures[C]// Aerospace Sciences Meeting. Reno, US, 2006: 50-54.
[16] GILMORE A, EVERNDEN B, ESTES L, et al. Space Shuttle Orbiter Structures & Mechanisms[C]//AIAA SPACE 2011 Conference & Exposition. California, US, 2011: 20-24.
[17] SUGIMORI D, UEDA T, NANRI H, et al. Development and Utilization of Rocket Engine Test Database (ReDak) in Japan Aerospace Exploration Agency[C]//48th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit. Atlanta, GA, 2012: 15-18.
[18] SASAKI S, OHASHI H, HIRAI T, et al. Development of Plane-parallel Impact-ionization Dust Detectors with Large Aperture: A Candidate for Kibo Exposed Facility Payload[J]. Transactions of the Japan Society for Aeronautical & Space Sciences Space Technology Japan, 2009, 7(26): 271-274.
[19] RAZOV A I, CHERNIAVSKY A G. Applications of Shape Memory Alloys in Space Engineering: Past and Future[J]. European Space Agency, 1999, 20(4): 24-27.
[20] 阎绍泽, 徐峰, 刘夏杰, 等. 形状记忆合金智能结构的研究进展[J]. 精密制造与自动化, 2003(b09): 148-150. YAN Shaoze, XU Feng, LIU Xiajie, et al. Research Progress on Intelligent Structure of Shape Memory Alloy[J]. Precision Manufacturing and Automation, 2003(b09): 148-150. (in Chinese)
[21] MCKINNIS D N. Fastening Apparatus Having Shape Memory Alloy Actuator: US, 51602333[P]. 1992-05-13.
[22] 闫晓军, 张小勇. 形状记忆合金智能结构[M]. 北京: 科学出版社, 2015: 34-38. YAN Xiaojun, ZHANG Xiaoyong. Shape memory alloy intelligent structure[M]. Beijing: Science Press, 2015: 34-38. (in Chinese)
[23] YAN X, HUANG D, ZHANG X, et al. A One-stage, High-load Capacity Separation Actuator Using Anti-friction Rollers and Redundant Shape Memory Alloy Wires[J]. Review of Scientific Instruments, 2015, 86(12): 153-11.
[24] YOO Y I, JEONG J W, LIM J H, et al. Development of a Non-explosive Release Actuator Using Shape Memory Alloy Wire[J]. Review of Scientific Instruments, 2013, 84(1): 17-22.
[25] CHRISTIANSEN S, TIBBITTS S, DOWEN D. Special Functions: Fast Acting Non-pyrotechnic 10kn Separation Nut[J]. 1999, 54(1): 11-16.
[26] SMITH S, DOWEN D, FOSSNESS E, et al. Development of Shape Memory Alloy (SMA) Actuated Mechanisms for Spacecraft Release Applications[C]//13th AIAA/USU Conference on Small Satellites. Atlanta, US, 1999: 15-18.
[27] GARDI R. Final Improvements and Tests on a SMA Actuated, Lightweight Mechanism for Microsatellite[C]//54thInternational Astronautical Congress of the International Astronautical Federation, the International Academy of Astronautics, and the International Institute of Space Law, Bremen, Germany, 2006: 1-7.
[28] VARMA V K. Shape Memory Alloy Actuator: US, 6762515B2[P]. 2004-06-13.
[29] HUANG D, YAN X, ZHANG X, et al. Note: A SMA Wire Actuated Extremely Long-lifetime Release Actuator Using Two Ball-lock Mechanisms[J]. Review of Scientific Instruments, 2017, 88(5): 132-136.
[30] NAVA N, COLLADO M, CABÁS R. REACT: Resettable Hold Down and Release Actuator for Space Applications[J]. Journal of Materials Engineering & Performance, 2014, 23(7): 2704-2711.
[31] KAISER F. Shape Memory Alloy (SMA)[J]. Fkaiser Pbworks, 1998, 64(1): 44-46.
[32] LUCIANO G, GALET G. Space Mechanism Actuated by a Shape Memory Alloy Component[C]//Sixth European Space Mechanisms and Tribology Symposium. Zürich, Switzerland, 1995: 221.
[33] 曹乃亮, 董得义, 李志来. 基于形状记忆合金的空间分离装置研究进展[J]. 航天返回与遥感, 2014, 35(5): 9-18. CAO Nailiang, DONG Deyi, LI Zhilai. Non-pyrotechnic Separation Devices Research Based on Shape Memory Alloy[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(5): 9-18. (in Chinese)
[34] PEFFER A, DENOYER K, FOSNESS E, et al. Development and Transition of Low-shock Spacecraft Release Devices[C]//Aerospace Conference Proceedings. California, US, 2000: 277-284.
[35] 韩邦成, 刘强. 基于自锁原理的磁悬浮飞轮电磁锁紧机构[J]. 光学精密工程, 2009, 17(10): 2456-2464. HAN Bangcheng, LIU Qiang. Electromagnetic Locking Device Based on Self-Locking for Magnetic Suspended Flywheel[J]. Optics and Precision Engineering, 2009, 17(10): 2456-2464. (in Chinese)
[36] 刘强, 房建成, 韩邦成, 等. 磁悬浮飞轮用可重复电磁锁紧装置的设计与试验[J]. 机械工程学报, 2012, 48(8): 12-20.LIU Qiang, FANG Jiancheng, HAN Bangcheng, et al. Design and Experiment of Repeated Electromagnetic Locking Device for Magnetic Bearing Flywheel[J]. Journal of Mechanical Engineering, 2012, 48(8): 12-20. (in Chinese)
[37] BLOOM J. On-orbit Autonomous Servicing Satellite (OASIS) Systems Requirements Document[R]. Washington: University of Washington, 2000: 1-101.
[38] MORRING F. Flying eyeball: NASA Pushes Tiny Robot to Provide Astronauts a ‘God′s-eye view’ of Shuttle Future Vehicles[R]. Space Technology, 2005, 163(5): 10-14.
[39] OCAMPO C, WILLIAMS J. Electromagnetically Guided Autonomous Docking and Separation in Micro-gravity[R]. Texas: University of Texas, 2005: 1-32.
[40] UNDERWOOD C I, PELLEGRINO S. Autonomous Assembly of a Reconfiguarble Space Telescope (AAReST): a CubeSat/Microsatellite Based Technology Demonstrator[C]. The 27th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, 2013: 12-15.
[41] 张元文. 空间电磁对接/分离动力学与控制研究[D]. 长沙: 国防科学技术大学, 2013.ZHANG Yuanwen. Research on Dynamics and Control of Space Electromagnetic Docking and Separation [D]. Changsha: National University of Defense Technology, 2013: 1-22. (in Chinese)
Overview of Reusable Locking Technology in Space
YANG Zechuan1LUO Rubin2LIAO He3LIAO Jun1LUO Shibin1JIANG Yi1YUAN Junjie1WANG Ning1
(1 School of Aeronautics and Astronautics, Central South University, Changsha 410083, China)(2 Beijing Institute of Astronautical System Engineering, Beijing 100076, China)(3 Shanghai Institute of Satellite Engineering, Shanghai 200235, China)
Repetitive locking technology is a key technology on spacecraft for achieving repeated locking and separation between the detachable structure of the aircraft and the fixed structure. This paper gives an overview of the repeated locking techniques used by different countries in space vehicles, spacecraft and satellites. It elaborates on the research progress of mechanical locking, memory alloy locking and electromagnetic locking technology. Furthermore the advantages and disadvantages of the locking scheme, the development trend and prospect of different repetitive locking technologies in future applications are prospected, which provide a reference for the selection and development of spatial repetitive locking technology.
mechanical locking; shape memory alloys locking; electromagnetic locking;reusable locking technology; spacecraft mechanism
V47
A
1009-8518(2019)04-0010-12
10.3969/j.issn.1009-8518.2019.04.002
杨泽川,男,1996年生,现在中南大学航空宇航科学与技术专业攻读硕士学位。研究方向为飞行器总体设计。E-mail:yangzechuan01@csu.edu.cn。
廖俊,男,获哈尔滨工业大学博士学位,副教授,研究方向为飞行器总体设计。E-mail:liaojun@csu.edu.cn。
2019-04-03
国家重点研发计划(2016YFB0500801);中南大学创新驱动项目(2018CX024)
(编辑:庞冰)
猜你喜欢
兵工学报(2022年1期)2022-03-14
模具制造(2022年1期)2022-02-23
汽车实用技术(2021年18期)2021-10-11
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
思维与智慧·上半月(2020年4期)2020-04-13
发明与创新·小学生(2019年8期)2019-08-27
新高考·高一物理(2016年10期)2017-07-07
城市建设理论研究(2014年25期)2014-09-24
武当(2009年9期)2009-09-16
中学生数理化·高一版(2008年12期)2008-06-15
