
基于多块结构网格的滑行艇巡航时流场研究
2019-10-12 02:02吴利红刘开周伍忠凯徐广洲
舰船科学技术 2019年9期
吴利红,刘开周,伍忠凯,徐广洲
(1. 大连海事大学,船舶与海洋工程学院,辽宁 大连 116026;2. 中国科学院沈阳自动化研究所,机器人学国家重点实验室,辽宁 沈阳 110016)
0 引 言
滑行艇是高速船舶的一种,主要通过抬升船体,减少排水量,依靠滑行板提供的动升力减小高速航行中的兴波阻力达到高速减阻的目的。滑行艇当前主要应用在游艇和无人艇上。滑行艇相对常规排水型船体而言,其水动力比较复杂,航行时会引起水面兴波,尾部“虚长度”的尾流和纵向及横向的水流飞溅。精确捕捉这种流动现象,以及由此引起的水动力变化和航态变化,是进行滑行艇水动力性能预报,设计布置推进系统的前提。当前关于滑行艇的研究主要是滑行艇的模型试验[1],探讨艇型改善;滑行艇阻力大小的理论估算和CFD 预报[2-4],而对滑行艇的流场研究较少,以及考虑流场特性和阻力需求的叠加推进系统的研究较少,本文采用多块结构网格[5,6],对某滑行艇进行阻力预报,并详细分析了其流场特征,最后为其巡航速度配置对应的对转桨,给出了滑行艇自航推进时的流场特性。
1 数值建模

图1 ELCO 滑行艇和横剖线图Fig. 1 Planning craft and its profile
研究对象选择ELCO 滑行艇,它是美国戴维.泰洛船模试验池(DTMB)试验模型艇的原型艇,三维模型和横剖线图如图1 所示[7]。此艇主尺度为L23.29 m×B4.03 m×D0.896 m,静止排水量 Δ=45.360 t。此艇为无断级滑行艇,纵向不设断级,包含单根折角线,横剖面为V 型,艇底有一定的斜升角,由首到尾逐步降低,在尾板处其斜升角只有1°~4°,尾部采用方型尾。
对水面船舶进行数值模拟可以采用混合网格(结构化网格和非结构化网格[6])或多块结构网格[5]。混合网格具有网格建模快,但是网格数量大,计算精度差的特点。多块结构网格,网格需要根据流场特征进行网格分区,网格划分需要大量人工调试,但是其正交性好,网格数量少,计算精度高,尤其能捕捉尾部流场细节。本论文采用多块结构网格进行滑行艇流域的网格划分。整个流域分为12 块,网格在水线面附近进行加密。游艇模型及外流域都采用分区结构网格。为了捕捉滑行艇表面的边界层流动特性,在滑行艇壁面区域设置边界层网格,第1 层网格布置在边界层内,满足 y+=30 ~500,并以1.2 的幂指数比例增加,总共设置10 层边界层。同时为了捕捉滑行艇尾部的尾流场,在尾部进行了局部加密。整个计算域的网格划分如图2 所示。
2 数值结果分析
滑行艇阻力数值模拟,首先需要确定不同航速的航态。可以采用查结法和SIT 方法估算滑行艇不同航速的纵倾角,当 Fn∇>1.5时,查结法具有较高的纵倾角计算精度[2]。查结法是通过游艇的艇重、艇速、艇宽、重心到尾板的水平距离、中部及尾部横向斜升角等已知参数计算船宽傅汝德数、动荷载系数,然后计算纵倾角及浸湿比,进而对纵倾角计及斜升角的影响进行修正,最后获得不同航速滑行艇的纵倾角,图3给出不同航速对应的滑行艇纵倾角。
对此滑行艇从低速排水型状态到高速滑行状态进行了航行阻力计算,以R_CFD 表示,将计算结果与模型试验换算得到的试验值R_test,以及采用查结法理论计算得到的阻力值R_cha 进行对比,如图4 所示。由图4 可以看出,滑行艇从排水状态到全滑行状态(1 <Fn∇<3)之间的过渡阶段,阻力曲线呈驼峰形状,见R_test 曲线。采用数值计算的滑行艇阻力与试验计算值较接近,尤其是在滑行阶段, Fn∇≈2.7,误差在3.5%以内,在排水型航态到过渡阶段,阻力计算值相对试验值偏小,主要是吃水偏小的缘故;高于滑行状态,阻力计算值相对试验值也偏小,主要原因可能是高速航行时,滑行艇的龙骨浸湿长度WLK 变大,而折角线浸湿长度WLC 变小,表明滑行艇存在较大的喷溅现象。而当前的数值模拟由于网格精度和计算模型的问题,还不能将喷溅现象捕捉,因此计算结果会出现较大的误差[8]。而查结法与试验值对比,在排水型和滑行状态与试验值较接近,过渡阶段则误差较大。

图3 不同航速对应的纵倾角Fig. 3 Trims Vs. velocity

图4 阻力预报Fig. 4 Resistance prediction
图5 给出了水面兴波,明显可见由艇尾产生的卡尔文兴波现象。图6 和图7 分别为滑行艇方尾的空穴和虚长度图,可以看出方尾相当于延长了船底外板长度,使得流线沿着惯性方向流动,而不是常规的突然收尾的粘性涡流。图8 和图9 给出滑行艇航行时舷侧流体在折角线处引起飞溅的三维图和二维图。图10 为艇底动压图,其中可见明显的艇中部形成高压区,由此引起动升力,提供船舶部分重力支撑。
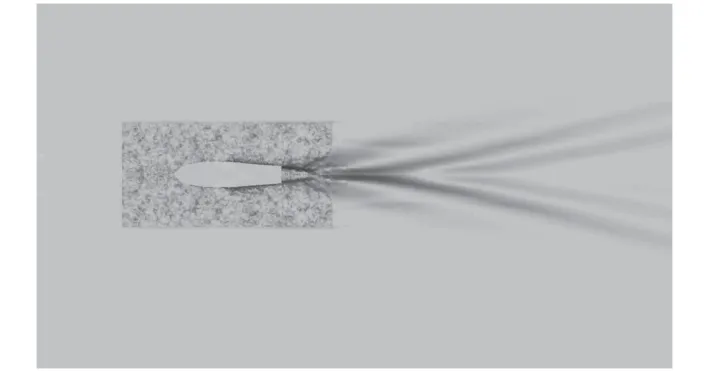
图5 卡尔文兴波Fig. 5 Kalvin wave

图6 方尾“虚长度”两相流Fig. 6 Volume of fluid at square tail
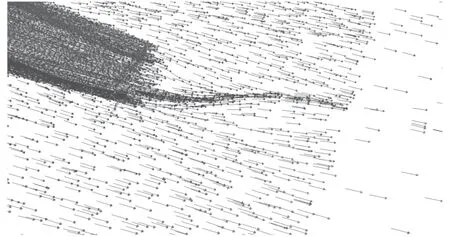
图7 方尾“虚长度”速度矢量图Fig. 7 Velocity vector

图8 滑行艇飞溅三维图Fig. 8 Splash picture in 3D

图9 喷溅舷侧现象二维图Fig. 9 Splash picture in 2D

图10 艇底动压图Fig. 10 Dynamic pressure of bottom
3 推进系统布置
滑行艇艇尾采用方尾,数值模拟和理论都表明,高速航行时,尾流会存在惯性,不会因为方尾的截断而在尾部出现漩涡回流,而是随着流速方向继续往后传播,在方尾后方形成一片空流场,类似船体尾部延长的效应,即“虚长度”。这种尾有助于减少阻力,因而滑行艇的尾部推进布置形式不同于常规船型。常规船体其推进系统直接布置在船尾,利用船尾的伴流,提高推进效率。而高速滑行艇,则不应将螺旋桨直接放置在船尾,避免破坏“虚长度”尾流。相应的放置推进器位置有2 种,一种是悬挂机形式,如图11所示,此时螺旋桨应该置于船底以下一定深度,避免干扰虚长度。另一种是前置倾斜形式。图12 给出了悬挂式滑行艇配置对转桨的自航流场特性,可见,当桨悬挂在滑行艇尾下方一定深度,并不影响滑行艇尾部的方尾流场特性。

图11 外挂机式螺旋桨Fig. 11 Planing craft with outboard CRP

图12 滑行艇外挂对转桨自航流场Fig. 12 Flow field of planning craft in self-propulsion with a CRP
4 结 语
本文进行ELCO 滑行艇的水动力性能研究。将数值计算结果与理论查结法和试验方法进行了对比。明确了数值方法能较准确预报滑行艇的航态和滑行阻力,尤其是接近滑行时的阻力预报,其误差只有3.5%。表明CFD 能准确估算出滑行艇的航速。但是根据计算的经验,其中重心深沉位置的准确性(吃水会随着航速改变)直接影响到数值计算的精度。其次给出了滑行艇在滑行时的流动特征,数值模拟再现了滑行艇方尾“空穴”,“虚长度”以及高速喷溅现象。最后给出具有方尾特征的高速艇体其对转桨外挂布置形式,并分析了其自航的流场特征。可以看出,外挂对转桨并没有破坏方尾流场特性。
猜你喜欢
临床骨科杂志(2022年4期)2022-11-24
兵器装备工程学报(2022年10期)2022-11-01
北京汽车(2021年3期)2021-07-17
舰船电子工程(2021年6期)2021-06-28
科学与财富(2021年33期)2021-05-10
科学大众·小诺贝尔(2021年10期)2021-01-22
学生导报·东方少年(2020年1期)2020-05-06
风能(2020年7期)2020-04-19
红领巾·探索(2019年6期)2019-08-01
学生导报·东方少年(2019年28期)2019-01-17
