
具有不可微时变时滞四元数神经网络的全局μ-稳定性*
2019-10-09 01:55刘丽缤游星星潘和平
重庆工商大学学报(自然科学版) 2019年5期
刘丽缤, 游星星, 潘和平**
(1.重庆工商大学 财政金融学院,重庆400067;2.重庆交通大学 经济与管理学院,重庆 400074)
0 引 言
20世纪80年代,自美国加州理工学院生物物理学家Hopfield提出人工神经网络系统以来,人工神经网络得到了广泛研究[1].目前,人工神经网络已广泛应用于信号处理、模式识别、联想记忆、优化计算等诸多领域[2-3].在这些领域的应用中,首要问题是分析网络的稳定性[4-5].
根据神经网络处理数据的类型,可以将其分为实值神经网络(RVNNs)、复值神经网络(CVNNs)和四元数神经网络(QVNNs)3类.目前关于实值、复值神经网络稳定性的研究已经有很多成果[5-7],但它们具有局限性.QVNNs作为RVNNs和CVNNs的扩展,其神经元的状态、输出以及网络的权值都是四元数,在处理高维度数据时,具有很大优势,比如图形处理、3D仿射变化.因此,对四元数域上神经网络的动力学行为分析成为近年来的研究热点.Liu Y[7]通过四元数复数分解法,将QVNNs分解为两个复值系统,利用同胚映射原理,得到网络平衡点的全局μ-稳定性判据,其结果是以复值线性矩阵不等式(CVLMI)形式表示的.文献[8—9]采用类似于文献[7]的方法,将QVNNs系统分解,得到了具有混合时滞QVNNs系统平衡点的存在性、唯一性、全局μ-稳定性的充分条件.Chen X F[10]基于同胚映射原理和Lyapunov定理,利用四元数模不等式技术研究了具有泄漏、离散时滞和参数不确定的QVNNs系统的鲁棒稳定性.上面提到的关于μ-稳定性的结果大多都是在QVNNs的激活函数可分解的条件下得到的,这种分解的方法使得系统的维度成倍增加,并且会增加计算的复杂度.此外,由于四元数乘法不满足交换性,将QVNNs分解为两个CVNNs的方法不具有普适性.
基于以上分析,在不要求QVNNs可分解情况下,构造Lyapunov-Krasovskii泛函,通过自由权矩阵和矩阵不等式等技术,将QVNNs考虑为一个整体,研究了具有不可微时变时滞的四元数神经网络的全局μ-稳定性,获得了网络平衡点的全局μ-稳定性的充分性判据.
结构组织如下:第1节介绍了相关预备知识,包括四元数代数、系统介绍、假设、定义和引理;第2节给出了基本定理及μ-稳定性证明过程;第3节给出了一个数值算例验证了所得结果的有效性;第4节总结了文章所做的工作.
1 预备知识
1.1 四元数代数
一个四元数可以写成以下形式:
p=p0+p1i+p2j+p3k∈Q
其中p0,p1,p2,p3∈R,且虚数单位i,j,k满足i2=j2=k2=ijk=-1,ij=-ji=k,ik=-ki=j,jk=-kj=i,由此可知四元数乘法不可交换.定义另外一个四元数q=q0+q1i+q2j+q3k,则四元数p与q的和、乘积分别定义为
p+q=(p0+q0)+(p1+q1)i+(p2+q2)j+(p3+q3)k
pq=(p0q0-p1q1-p2q2-p3q3)+(p0q1+p1q0+p2q3-p3q2)i+
(p0q2+p2q0+p3q1-p1q3)j+(p0q3+p3q0+p1q2-p2q1)k

1.2 系统表示及基本引理
本文考虑如下具有时变时滞QVNNs系统:
(1)
式(1)中,z(t)=(z1(t),z2(t),…,zn(t))T∈Qn,表示神经元状态向量;自反馈连接权矩阵D=diag(d1,d2,…,dn)∈Rn×n且di>0,(i=1,2,…,n);连接权矩阵、离散时变时滞连接权矩阵分别为A=(aij)n×n∈Qn×n,B=(bij)n×n∈Qn×n;f(z(t))=(f1(z1(t)),f2(z2(t)),…,fn(zn(t)))T为向量值激活函数;f(z(t-τ(t)))=(f1(z1(t-τ(t))),f2(z2(t-τ(t))),…,fn(zn(t-τ(t))))T∈Qn为具有时间延迟的向量值激活函数;外部输入向量为I=(I1,I2,…,In)T∈Qn;0≤τ(t)≤τ表示不可微分的离散时变时滞.
给出如下假设:
(H1)激活函数fi(·)满足Lipschitz条件,即对任意β1,β2∈Q,存在li∈R(i=1,2,…,n),使得:
|fi(β1)-fi(β2)|≤li|β1-β2|
其中:li为常数,且Γ=diag(l1,l2,…,ln).


(2)
其中
定义2[9]若μ(t)>0是一个连续函数,当t→∞时,μ(t)→∞,存在常数K>0使得
成立,则式(2)是μ-稳定的.
引理1[9]对任意一个正定Hermitian常数矩阵W∈Qn×n,W≤0和标量函数α:[t,ξ]→Qn,t≤ξ,有

注1 T和*分别表示矩阵的转置和共轭转置;P≥Q(P>Q)表示矩阵是半正定(或正定)的;λmax(P)、λmin(P)分别表示矩阵P的最大、最小特征值.
2 主要结果
定理1 在假设(H1)成立的条件下,如果存在常数α,β≥0,正定的Hermitian矩阵P,对角矩阵R1,R2>0,四元数矩阵X11,X12,X13,X22,X23,X33,Q1,Q2,μ(t)>0是可微函数,使得不等式
(3)
(4)
成立,其中
则式(1)的平衡点是全局μ-稳定的.
证明构造Lyapunov-Krasovskii泛函
V(t)=V1(t)+V2(t)+V3(t)
(5)
其中:

根据引理1,沿着式(2)求导可得:
(6)
(7)


(8)
由假设(H1)可得:
(9)
(10)
根据式(2),运用自由权矩阵,令
(11)
将式(6)—式(11)相加可得
D+V(t)≤μ2(t)η*(t)Ωη(t)
(12)
其中:
(t-τ(t))))*
由式(4)可得:
D+V(t)<0,t≥0
(13)
由于λmin(P)是一个实数,因此可得到:
所以
(14)
其中:
故式(1)的平衡点是全局μ-稳定的,证毕.
注2 近年来,许多学者致力于QVNNs系统的稳定性研究,但由于四元数乘法不满足交换律,使得研究四元数比实数、复数更为复杂.文献[7,8]将QVNNs系统分解为两个CVNNs,研究了在时变时滞可微情况下QVNNs系统的全局μ-稳定性;文献[9]采用类似的分解方法研究了不可微时变时滞QVNNs系统的全局μ-稳定性,但这种分解方法会导致两个问题:一是会使系统维数增加导致计算更复杂,同时还会丢失一些与四元数所携带振幅、相位相关的信息;二是在系统激活函数不可分解时,这种方法获得的结果往往是无效的.因此,本文将QVNNS系统考虑为一个整体,研究了不可微分时变时滞QVNNs系统的全局μ-稳定性,在一定程度上扩展和改进了文献[7-9]的结果.
3 数值仿真实例
本文考虑如下具有两个神经元的不可微分时变时滞的QVNNs系统:
(15)
f1(z)=f2(z)=0.5 tan h(z),∀z∈Qτ(t)=
0.2|sin (3t)|
D=diag(2.881,0.963)
运用MATLAB YAMIP工具箱,可以求解式(3)和式(4),得:
由定理1知式(15)的平衡点是全局μ-稳定的,状态变量的时间响应轨线图(图1—图4)验证了平衡点的全局μ-稳定性,并且式(15)的初始条件为
z1(t)=6.162+1.259 i-0.229 j-2.619 k
z2(t)=-3.081-1.298 i+0.963 j+4.942 k
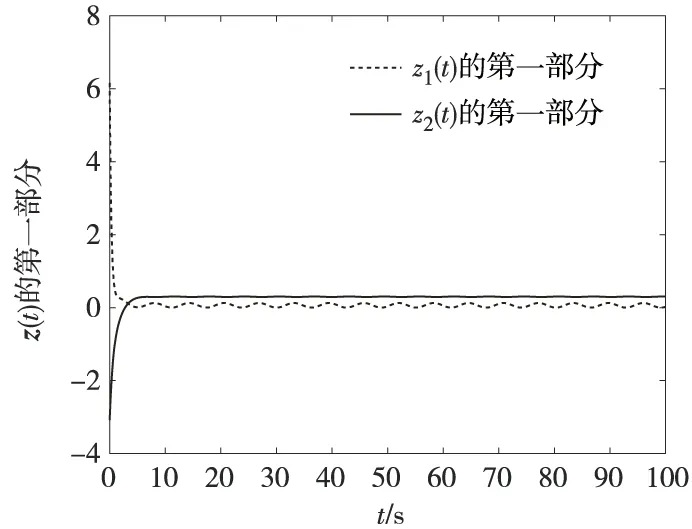
图1 第一部分时间响应轨线

图2 第二部分时间响应轨线

图3 第三部分时间响应轨线

图4 第四部分时间响应轨线
4 结 论
研究了具有不可微分时变时滞的QVNNs系统的全局μ-稳定性,在不要求QVNNs系统可分解的情况下,构造合适的Lyapunov-Krasovskii泛函,通过自由权矩阵和矩阵不等式等技术,获得了系统平衡点的全局μ-稳定性的充分性判据;最后,通过一个数值仿真实例验证了结果的有效性.
猜你喜欢
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
自动化学报(2019年12期)2020-01-19
自动化学报(2019年6期)2019-07-23
北方工业大学学报(2019年5期)2019-03-30
传媒评论(2018年7期)2018-09-18
传媒评论(2018年11期)2018-02-16
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
IT时代周刊(2015年7期)2015-11-11
中国铁道科学(2015年4期)2015-06-21
