
基于激光扫描传感器的车体姿态测量方法
2019-10-09 05:25何思婷
自动化与仪表 2019年9期
何思婷
(北京交通大学 机械与电子控制工程学院,北京100044)
轨道检测车辆在运行过程中姿态会发生随机变化,车体相对于轨道会产生6 个方向的振动(横摆振动、沉浮振动、伸缩振动、俯仰振动、摇头振动、侧滚振动)[1-2]。 目前,轨道检测车的车体姿态测量方法有接触式和非接触式2 种,接触式测量方法包括拉线式位移传感器检测、电容式位移传感器检测以及加速度传感器检测,但只能获得车体相对于转向架的位移变化[3-4];非接触式检测方法包括激光雷达(LMS)测距定位和计算机视觉检测等方法,激光雷达易受电磁干扰,计算机视觉检测方法可以实现动态检测,但标定复杂且算法不成熟[5-6]。
本文提出了一种基于激光扫描传感器的车体姿态测量方法,实现传感器同步采集,采用非接触测量方式采集钢轨轮廓信息,提取4 个轨距特征点,计算测量轨平面, 与标准轨平面对比计算车体姿态,准确快速地实现车体相对于轨道的振动补偿。
1 车体姿态测量方案设计
系统硬件部分由2 路二维激光测距传感器和4 路二维激光扫描传感器、1 路转速传感器、1 路激光位移传感器和1 套数据采集处理系统组成,如图1 所示。 主要实现隧道轮廓采集、钢轨内侧轮廓采集、测速定位和数据传输等功能。 其中,车辆姿态用于对隧道尺寸数据的补偿, 由于车辆振动使所测数据产生较大误差, 因此必须对车辆姿态进行监测,进而实现数据补偿。 因为形变分析需把同一位置的实际轮廓数据与隧道原始轮廓数据进行对比,所以需要对车辆精确定位,使测量隧道轮廓与里程匹配。 软件部分根据采集的信息进行滤波处理,从钢轨轮廓提取轨距特征点,确定测量轨平面,与标准轨平面对比,实现车体姿态测量,对标定好的隧道轮廓进行姿态补偿, 经过相对定位处理后,进行形变分析。 本文主要研究车体姿态的测量。
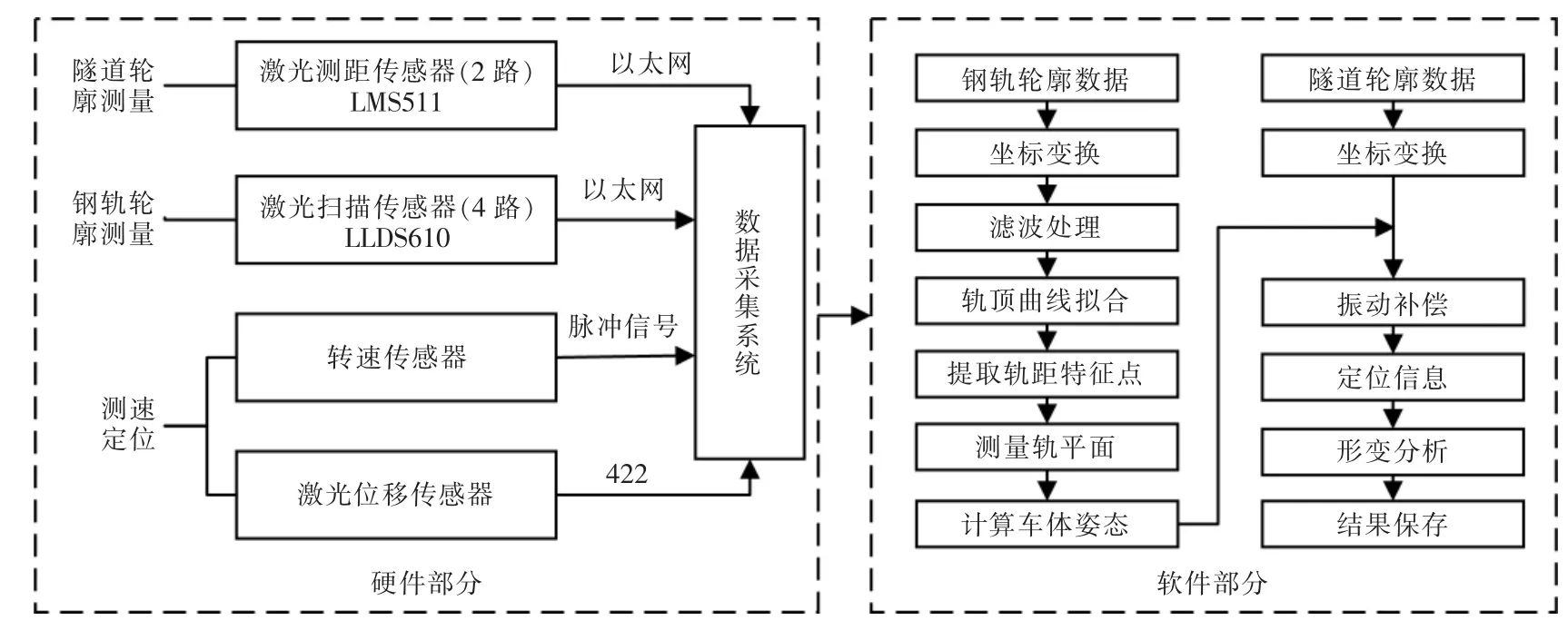
图1 系统整体方案设计框图Fig.1 Block diagram of system overall design
在巡检小车的4 个角呈矩形布置4 台型号为LLDS610 的激光扫描传感器,分别扫描左右钢轨内侧得到4 条钢轨内侧轮廓,如图2 所示,用于提取轨距特征点,确定轨平面,计算车体姿态,对隧道轮廓数据进行补偿。
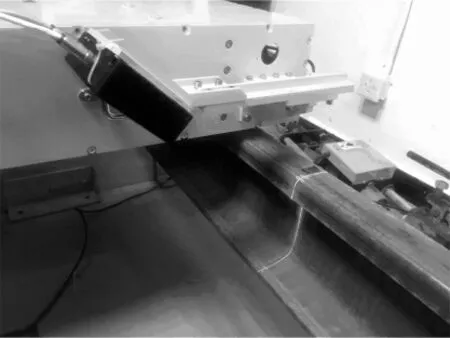
图2 激光扫描传感器采集钢轨轮廓图Fig.2 Rail profile acquired by LLDS610 sensor
2 传感器标定
激光传感器输出的测量数据坐标是基于传感器坐标系的,需要将其转换到轨道基准坐标系才能进行磨耗计算。
轨道基准坐标系以轨底中心为原点,与轨道垂直的水平方向为X 轴,竖直方向为Y 轴,沿轨道方向为Z 轴。 传感器安装在检测车上之后,其相对于轨道基准坐标系存在6 个自由度信息, 分别是沿3个轴的位置偏移以及绕3 个轴的旋转角即俯仰角α、偏航角β 和侧滚角θ。
为实现测量数据从传感器坐标系到轨道基准坐标的转换,就要获得传感器相对于轨道基准坐标系的六自由度,然后通过旋转和平移实现坐标系的转换[7-8]。X、Y、Z 为轨道基准坐标系,x、y、z 为二维激光扫描传感器坐标系,两个坐标系之间的变换关系如下:

由于选用的激光器是二维激光传感器,其测量只包含X 和Y 两个方向的信息,因此最终需要确定的是旋转矩阵以及X 和Y 方向的偏移。传感器采集到的点在传感器坐标系下坐标为[x,y],在轨道基准坐标系下的坐标为[X,Y],两个坐标系之间的变换关系如下:

式中:θ 为传感器安装角度;Δx、Δy 分别为传感器相对于钢轨坐标系原点的偏移。
标定时采用已知尺寸的长方体作为标准块进行初步的标定,用二维激光扫描传感器对标准块轮廓进行扫描,得到标准块的轮廓数据,与标准轮廓比对, 利用标定程序得到旋转矩阵R 和位移矩阵T,将钢轨轮廓进行初步转正还原。

采用ICP 配准算法来实现测量数据精确的坐标系转换。 钢轨坐标系Onxnyn建立如图3 所示。 其中AB 段为轨腰,BC 段为轨底,DE 为轨头轮廓段。
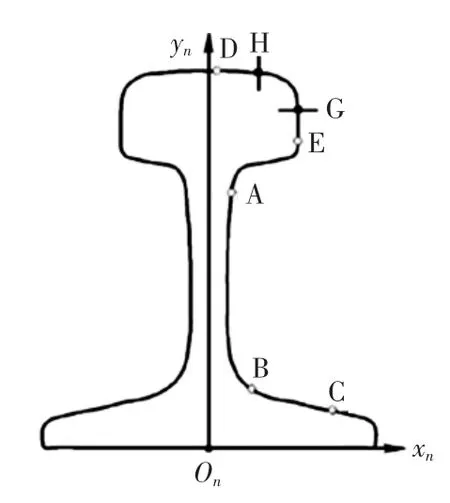
图3 标准钢轨断面图Fig.3 Standard rail section
由于轮轨接触时,钢轨内侧轨腰与轨底未产生磨损和形变, 轨腰和轨底这段轮廓AC 的特征最为明显, 因此采用改进的ICP 算法实现AC 段轮廓点从传感器坐标系到钢轨坐标系的配准。 图4 为ICP算法配准后的钢轨轮廓,可以看出通过ICP 算法配准,就可以进一步确定测量轮廓转换到钢轨坐标系下的旋转矩阵R 和平移向量T,使同源点之间的距离最小, 实现测量轮廓和标准轮廓的进一步匹配,提高系统测量的准确性。

图4 ICP 算法配准后的钢轨轮廓Fig.4 Rail profile after registration by ICP algorithm
3 车体姿态测量算法
本文提出了一种车体姿态测量方法,首先采集4 条钢轨轮廓数据,进行坐标系变换和滤波处理后,提取出4 个轨距特征点, 进而可以得到测量轨平面,与标准轨平面对比,计算出车体姿态。
根据轨距定义,轨距特征点位于钢轨顶面下16 mm 处内侧,首先需要确定钢轨轮廓顶面下方16 mm 处的位置。做轨顶曲线的切线,再向切线平行方向平移16 mm 得到特征直线,特征直线与钢轨内侧轮廓的交点即轨距特征点[9]。
提取轨距特征点首先要拟合轨顶曲线以消除基于离散轮廓点定位轨距特征点引起的误差。 拟合轮廓曲线的目的是为了获取钢轨顶面切线,只研究轨顶半径为300 mm 部分圆弧拟合即可。 由于轨顶R300 圆弧长度占比很小以及轨头发生磨耗圆弧半径未知,采用无约束或半径约束的最小二乘拟合方法会产生较大误差。
为了提高轨顶曲线拟合的精度,本文采用一种带约束的最小二乘法圆弧拟合方法。 首先大致提取出轨头部分轮廓数据,对轨顶圆弧上一点及其左右各20 个点进行圆心初次拟合, 可以得到圆弧的圆心坐标(x0,y0)及半径r0。
为了采用更多数据点进行曲线拟合,必须对曲线进行精确分段,更精确地找出轨顶半径为300 mm的圆弧。
计算各点到拟合圆心的距离:

给定一个阈值d0=0.01 mm,当d≤d0时,点在拟合圆上;当d>d0时,则点不在圆上。
通过阈值判断点是否在拟合圆弧上,将轨顶圆弧的端点找出来。 之后再采用带约束的圆弧拟合方法对精确分段后的轨顶曲线进行第二次拟合得到轨顶轮廓曲线S。
选择两条对称的钢轨轮廓,寻找它们的轨顶拟合曲线的最高公切线L0,即为钢轨顶面。 将L0向与公切线垂直方向平移16 mm 得到直线L1。由于钢轨轮廓数据P 为一系列离散的点的合集,因此需要拟合出钢轨内侧轮廓曲线。取钢轨内侧与直线L1距离最小的10 个点, 同样采用带约束的最小二乘圆弧方法拟合轮廓曲线,根据60 型钢轨截面可知,轨距特征点位于一段坡度为1∶20 的直线上。要拟合得到一条直线方程L2, 将拟合得到的直线L2和直线L1求交点g,即可得到轨距特征点的坐标,如图5 所示。

图5 轨距特征点定位过程Fig.5 Process of the track feature point positioning
由轨道基准坐标系下标准钢轨轮廓的4 个轨距特征点可以得到标准轨平面,如图6 所示,通过4条钢轨轮廓的轨距特征点就可以确定测量轨平面,与标准轨平面对比即可计算出车体姿态补偿矩阵,最后对隧道轮廓数据进行姿态补偿。

图6 标准轨平面Fig.6 Standard track plane
4 实验结果
由于隧道形变检测需要在轨道基准坐标系下进行形变计算,验证算法有效性可以采用系统得到的姿态补偿矩阵对标定后的隧道轮廓数据进行姿态补偿,将隧道轮廓数据精确还原到轨道基准坐标系下,然后把补偿后的隧道轮廓与同一位置的标准隧道轮廓同时显示在界面,如果两个轮廓能很好对齐,就证明车体姿态测量算法有效。
把检测小车静止时测得的隧道轮廓数据进行标定后作为标准隧道轮廓点集,人为晃动检测小车得到车体姿态变换时的测量轮廓数据。 图7 和图8所示为一组经过补偿的隧道断面轮廓与标准隧道断面轮廓的对比。

图7 振动补偿前轮廓对比图Fig.7 Profile comparison before vibration compensation
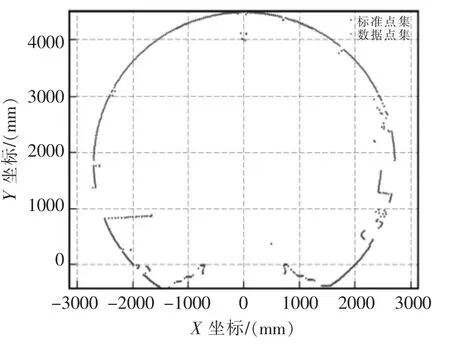
图8 振动补偿后轮廓对比图Fig.8 Profile comparison after vibration compensation
从图中可以看出,对发生车体姿态变化的隧道轮廓点集应用车体姿态补偿矩阵,隧道轮廓点集能与标准轮廓点集实现较好配准。
等间距选择多个断面,对每一个断面进行多次测量,设标准隧道轮廓数据点集中任意一点坐标为(x,y),测量轮廓数据点集中任意一点坐标为(X,Y),根据式(6)分别计算振动补偿前后隧道轮廓数据和标准隧道轮廓数据的均方根误差(RMSE),来体现补偿前后轮廓与标准轮廓的对应点的匹配差异,结果如表1 所示。


表1 振动补偿前后的均方根误差比较Tab.1 Comparison of root mean square errors before and after vibration compensation
从上表中得到补偿前均方根误差为2.2396 mm,补偿后均方根误差平均值为1.4113 mm。 可以看出经过振动补偿后的隧道轮廓数据与标准数据的均方根误差要明显小于未经补偿的均方根误差,可以说明经过系统振动补偿后的隧道轮廓更加接近标准隧道轮廓,同时可以说明该车体姿态测量算法能够有效地提高之后计算隧道形变的精度。
5 结语
本文提出了一种基于激光扫描传感器的车辆与轨道之间的姿态测量方法,采用非接触测量方式获取钢轨和隧道轮廓信息,运用ICP 算法完成了测量数据在传感器坐标系和轨道基准坐标系之间的精确转换。 通过计算车体姿态,对隧道断面轮廓数据进行振动补偿,通过实验证明了系统对于提高隧道异常形变检测精度的有效性。
猜你喜欢
城市轨道交通研究(2022年2期)2022-11-18
铁道建筑(2022年7期)2022-08-06
中国铁路(2022年5期)2022-01-01
社会观察(2020年2期)2020-11-17
铁道建筑(2020年5期)2020-06-20
铁路通信信号工程技术(2020年1期)2020-01-05
科技视界(2019年9期)2019-06-12
小学阅读指南·高年级版(2016年1期)2016-09-10
专用汽车(2016年12期)2016-02-11
山东工业技术(2014年20期)2014-10-21
