数字式旋变角度显示器的研究与实现
2019-09-20 09:59国营芜湖机械厂
安徽科技 2019年8期
文/ 郭 佳(国营芜湖机械厂)
一、概述
姿态角度的测量和获取是飞行控制和火控领域所有计算和控制的基础。旋转变压器因其结构简单,动作灵敏,对环境无特殊要求,维护方便,输出信号幅值大,抗干扰强等优点广泛应用于航空机载设备角位移的测量[1]。将旋转变压器输出的角度正余弦电压信号进行模数转换,通过数码管以数字形式显示,使其具有输出精度高、响应速度快、直观易读等优点,可极大地提升被测量机载电子设备的调试检测效率和友好度。
二、原理和设计思想
1.旋转变压器原理
旋转变压器是一种输出电压随转子转角而变化的角度测量装置,由定子和转子组成,旋变电压的原理见图1。当激励电压U 加到定子绕组时,定子绕组会产生感应磁场。转子绕组在定子绕组产生的感应磁场中旋转时就产生随角度变化的感应电动势E,其瞬时值为

其中k 为电磁耦合系数。
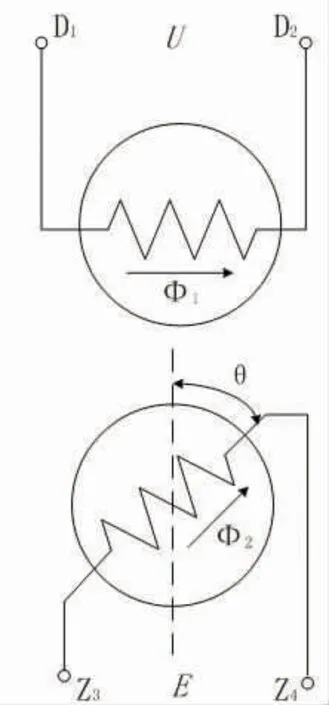
图1 旋变电压原理图
常见的旋转变压器式角度传感器采用两组相位相差90°的定子和转子绕组来实现输出电压的正余弦变换(见图2)。在定子绕组D1、D2上加正弦电压V1=Vmsinωt,D3、D4上加余弦电压V2=Vmcosωt,且保持定子与转子之间空间气隙内磁通分布符合正弦规律,当转子绕组Z1、Z2短接时,转子绕组Z3、Z4间的输出电压为

其中k 为电磁耦合系数,ω 为转子角速度,θ 为转子旋转角度。

图2旋转变压器原理图
此时,测得转子绕组瞬时感应电压V3,可间接得到转子角度θ。
2.旋变角度显示器的设计思路
将式(2)中旋变电压V3通过相敏解调转换为直流模拟信号,再通过模数转换将直流模拟信号变换为多位的并行数字信号。转换后的数字信号作为可编程存储器的地址码,用于寻址输出对应的BCD 码。地址码对事先写入程序的存储器寻址,存储器输出内存里的BCD 码,完成地址码到BCD 码的译码。BCD 码再通过BCD 码—7段数码管驱动转换芯片点亮数码管,使数码管显示可直接读取的角度值,其流程如图3 所示。
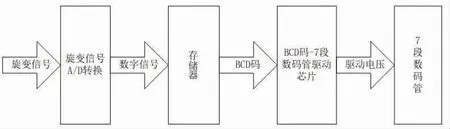
图3 数字旋变角度显示器工作流程
通过旋变信号模数转换后的并行数字信号的位数可以控制角度显示器的最小分辨精度。并行数字信号作为地址码,其位数决定了寻址范围[2]。以18 位并行数字信号为例,其寻址范围从00000 到3FFFF 即262144 个字,将360°经262144 等分,每份为0.00137°,因此转换后的18 位并行数字信号分辨精度可达5″[3]。
按等分的步长对可编程存储器进行编码如表1 所示。

表1 18 位寻址360°编码表
在实际应用中,需要0°~360°和-180°~180°两种范围的显示器,因此需要±180°模和360°模两种程序编码。±180°模编码除起始值为-180°外,在百位前还要设置符号位,存储器对应内存内写入符号位程序,其编码如表2 所示。
实际使用中为使硬件模块标准化,也可将360°模编码程序最高位作为符号位,存储器对应内存内写入正值。
三、电路实现
数字式旋变角度显示器硬件由模数转换器、寻址译码电路和BCD 码驱动和显示电路组成。以显示精度为0.001°、显示范围±180°的数字式旋变角度显示器为例进行说明。
1.模数转换器
旋变信号模数转换采用ZSZ/XSZ-V 系列高精度测速型轴角—数字转换器中的18XSZ243B-V 型转换器。该转换器采用跟踪转换技术[4]和模块化结构,分辨率18 位、激磁频率400Hz、信号电压36V、参考电压115V,输出为与TTL 电平兼容的并行自然二进制码,主要用于角度或位移量的模数转换,其引脚图如图4 所示。

表2 18 位寻址±180°编码表
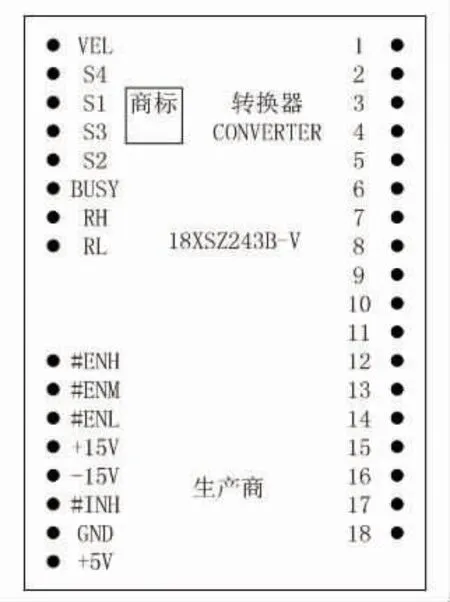
图4 A/D 转换器引脚定义
S4、S3、S2、S1 接被测旋转变压器的正余弦输出信号。1—18 为并行数据输出端,采用二进制,1 为最高位,以此类推。
RL、RH 为参考信号输入端,与旋转变压器激磁信号相连。参考信号的电压允许波动范围是+20%,频率波动范围是+10%。直流电源包括±15V、+5V,对电源要求允许波动范围不超过±10%,电源不能加反,否则会烧坏内部电路,造成转换器损坏。
INH 为禁止信号输入端,它使输出数据稳定在其加入并延迟3ms 的时刻。同时它将切断转换器内部跟踪环,使转换器处于非跟踪状态。当取消该信号后,转换器需要一定的时间再次跟踪。
ENH、ENM、ENL 分别为高中低位数据输出使能信号,逻辑高时对应数据位不输出。BUSY 为忙信号输入端,其用于计算机检测转换器状态,当输入模拟信号变化一个转换器最低有效位对应的电量时,就输出一个约2.5ms 宽的脉冲。若它为高电平则表明转换器内部电路正在工作,输出数值不稳定该值无效;只有当它为低电平时,数字输出端的数据有效。在本显示电路中只使用模块的A/D 转换部分,因此在电路中将INH、ENH、ENM、ENL接高电平,BUSY 端由于内部接有上拉电阻因此悬空。
2.译码和显示驱动电路
为满足18 位数字信号0.001°的显示精度,需要6位数字显示,加上符号位占用一位,共需7 个7 段数码管组合成角度显示电路。数码管驱动芯片选用CD4551BCD-7,该芯片具备消隐和锁存控制、可通过BCD 码输入直接驱动LED 数码管。每片CD4551BCD-7可驱动一个7 段数码管。

译码部分选用4 片W29C020 可编程flash 存储器,该存储器由18 位寻址,容量8×256K,输出两个4 位BCD 码。可编程存储器U1高1024 位写符号位编码程序、低1024 位写角度百位编码程序;U2高1024 位写角度十位编码程序、低1024 位写角度个位编码程序;U3高、低1024 位分别写角度十分位和角度百分位编码程序;U4高1024 位写角度千分位编码程序,低1024 位置空。
每片存储器可作为两片CD4551BCD-7 驱动芯片的输入。最后将U1到U4的输出与对应位的数码管驱动芯片连接即可实现对旋变信号的数字化显示。
四、实验验证
使用同一旋变角度传感器,在0 到180°范围内按每隔20°给定角度,分别记录机械指示器和数字显示器显示角度, 通过对比验证数字式旋变角度显示器显示值的正确性和精度。
根据测试数据,显示器显示角度最大综合误差小于4″,足以满足日常使用显示精度2′的要求。相比指针角度指示器精度提高,直观易读。
五、结束语
旋变信号的数字化显示只是其数字化的初步利用。旋变信号数字化使旋变信号直接与PXI 总线连接成为现实,为检测设备的自动化提供可能,有广阔的利用前景,有待进一步研究。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
科学大众(2021年9期)2021-07-16
科教导刊·电子版(2021年36期)2021-01-02
电脑报(2019年2期)2019-09-10
中国计算机报(2019年12期)2019-06-21
科技风(2019年13期)2019-06-11
时代农机(2019年2期)2019-04-24
电子制作(2019年24期)2019-02-23
浙江大学学报(工学版)(2016年11期)2016-06-05
环球时报(2014-06-18)2014-06-18