
AGA在太阳能电池阵寿命预测中的应用
2019-09-20 07:35:04
测控技术 2019年2期
(1.上海理工大学 光电信息与计算机工程学院 上海市现代光学系统重点实验室,上海 200093;2.国家卫星气象中心,北京 100081; 3.北京东方振动和噪声技术研究所,北京 100084;4.上海雄博精密仪器股份有限公司,上海 200444)
太阳能具有资源丰富、清洁无污染等优势,已成为国内外研究的热点。GaInP/GaAs/Ge三结太阳能电池因其高转换率、耐辐射、低成本等优点广泛应用到航天器中[1-3]。然而航天太阳能电池阵因承受恶劣的太空环境影响,使其输出能力随航天器运行的周期而逐渐降低,从而影响航天器后期运行[2-4]。因此研究GaInP/GaAs/Ge三结太阳能电池阵列衰减模型和寿命预测对卫星的电源设计和管理有重要的参考价值[5-7]。
目前,国内外学者已经提出不同的太阳能电池阵列输出功率预测方法。文献[1]~文献[7]通过对大量在轨数据统计和数学分析,总结电池阵输出功率随在轨运行时间的变化规律。基于模型的预测方法主要分析太阳能电池阵列输出功率衰减因素,对模型参数进行辨识,然后进行功率预测。文献[1]、文献[2]与文献[6]利用观测数据建立混合自回归滑动平均模型(ARMA),然后确定仅含趋势项和周期项的太阳能电池阵输出功率方程进行功率预测。文献[3]~文献[5]及文献[7]利用遥测数据分析了太阳光照周期、空间粒子辐射等对太阳能电池阵的影响求取衰减因子。文献[8]针对在轨卫星的GaInP/GaAs/Ge三结太阳能电池提出一种输出电流衰减的寿命预测模型对太阳能电池寿命进行预测,从电流方面建立了太阳能电池阵退化过程,通过定量分析得到结果。但文献[8]中的最小二乘法辨识参数,需要大量数据拟合,存在计算量大且精度不高的缺点,尤其在航天器后期难以根据少量数据辨识出准确的模型参数,造成预测误差比较大。
针对文献[8]的不足,本文提出基于自适应遗传算法(Adaptive Genetic Algorithm,AGA)对GaInP/GaAs/Ge三结太阳能电池阵电流衰减模型参数辨识,采用缩小参数范围的方法逐步提高AGA的识别精度,遗传操作中采用线性适应度函数和自适应交叉变异概率提高全局搜索能力避免算法早熟。实验结果表明,AGA辨识结果比GLS和GA辨识结果有显著提高,使太阳能电池阵寿命预测更加准确。可以通过预测太阳能电池阵输出功率低于设定的阈值时间,来确定卫星运行的时间,尤其运行后期通过遥测数据进行实时预测,可以更加准确地获得卫星的运行时间。对在轨卫星太阳能电池阵列的设计和管理有重要的参考意义。
1 模型分析
太阳能电池阵在轨输出功率计算公式为[9]
P=V·I
(1)
V=Vβ+VD1+VD2
(2)
式中,P为卫星太阳能电池阵的输出功率;V为卫星太阳能电池阵的输出电压;I为卫星太阳能电池阵的输出电流;Vβ为母线电压;VD1为太阳能电池阵上的上电缆及接插件的平均压降;VD2为隔离二极管压降[1-2]。
假设卫星的母线电压基本保持不变,则输出电压V也基本保持不变,那么由式(1)可知太阳能电池阵输出功率的衰减主要由太阳能电池阵输出电流衰减决定,因此采用太阳能电池阵原始输出电流为关键性能退化量[2-4,8]。
卫星在太空运行过程中,光照角通常呈现周期性变化。太阳能电池阵输出电流受光照角影响比较大[3-4]。当光照角θ大于0时,电池阵输出电流也会变化,如下式所示[8]:
Imax=I/cosθ
(3)
式中,Imax为φ=0时的电流;I为太阳能电池阵在轨电流;θ为太阳入射光线方向与电池表面法线方向夹角。利用3年内每天一个原始电流值和一个垂直光照角可以根据式(3)计算得出每天的最大电流值。
根据式(3)原始电流的变化趋势建立太阳能电池阵的电流衰减模型如下[8]:
D(t)=I/cosθ
=(a+b·tc)·(S0+d·cos(α+2·πti/T))/S0+ε
(4)
式中,a、b、c、d、α为模型参数,其中a>0,为t=0时的电流;b<0,为电流衰减速率;c>0,为时间变化的快慢程度;d、α为周期变化的太阳辐射强度参数。a+b·tc为电流的衰减规律,tc为指用幂函数来表示时间的函数;s0是太阳辐射强度;t为在轨时间(天);D(t)为θ=0下的电流,即为Imax;ε为一个符合期望μ=0的正态分布的随机变量[8]。
根据卫星正常工作的最低功率要求,由式(1)、式(2)计算出太阳能电池阵输出的最小电流,把最小电流值代入电流衰减模型,计算出太阳能电池阵的最长使用时间,通过把在轨遥测数据代入模型从而得到太阳能电池阵使用时间[8]。
利用AGA辨识模型五参数,得到确定的模型表达式,参照文献[8]定义的评价指标:SSE、RMSE、R-square对结果进行评价,如下所示:
(5)
(6)
R-square=
(7)
式中,RMSE为均方根误差;SSE为误差平方和;RMSE和SSE的值越近于0,说明模型参数辨识和拟合越好,数据预测也越精确;N为实验数据组数;R-square为方程确定系数,R-square越趋近于1,说明模型拟合越好。
2 自适应遗传算法
针对GA缺乏全局搜索能力和趋向局部最优解过早收敛等缺陷,提出AGA进行参数辨识,在进化后期自适应交叉概率逐渐变小,自适应变异概率逐渐变大来提高全局搜索能力[11-12]。算法具体流程如下。
步骤1:按随机方法在解向量范围内初始化种群大小N=50,遗传代数1000,初始交叉概率为0.8,变异概率为0.02。
步骤2:根据待求解的问题选择二进制编码。设某一参数的取值范围是[Umin,Umax],编码长度为10。
步骤3:计算个体适应度值。用均方误差的倒数作为适应度值。采用了适应度的线性尺度变换。 假设原来的线性尺度变换是F(x),经过线性变换后的适应度尺度函数为F′(x)可表示为
F′(x)=aF(x)+b
(8)

步骤4:采用比例选择算子,以正比于个体适应度值的概率来选择相应的个体:
(9)
步骤5:交叉操作,同时采用自适应交叉概率避免算法过早收敛和陷入局部最优解。自适应交叉概率按下式计算:
(10)
式中,Nc=0.8,为种群初始的交叉概率;pcf=0.4,为种群交叉概率调整值;f_max为最大适应度值;f_min为最小适应度值;f_avg为平均适应度值;s=15为种群相似系数;c=10为交叉概率调整系数。
步骤6:变异操作,采用单点变异,同时采用自适应变异概率避免算法过早收敛和陷入局部最优解。自适应变异概率按如下公式计算:
(11)
式中,Nm=0.02,为种群初始的变异概率;pmf=0.006,为种群变异概率调整值;f_max为最大适应度值;f_min为最小适应度值;f_avg为平均适应度值;s=15,为种群相似系数;m=10,为变异概率调整系数。
步骤7:判断是否满足迭代次数,若满足则输出此时的最优个体即最优解向量;否则回到步骤2。
3 结果与分析
3.1 算法参数设置
本文中S0=1353 W/m2,T=365。用MATLAB 2016b软件仿真,仿真结果如图1所示。
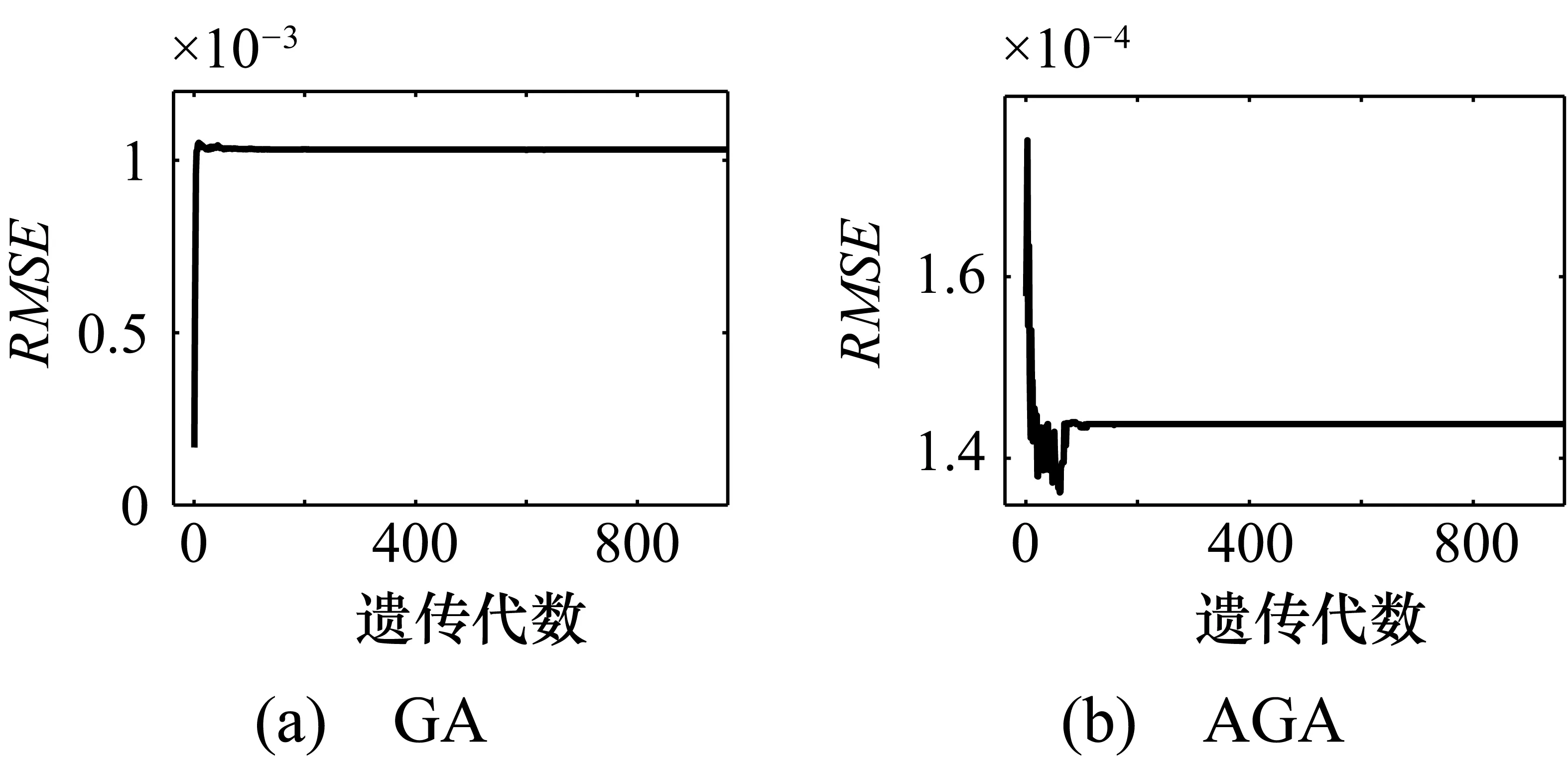
图1 迭代收敛曲线
由图1可知,GA陷入局部最优解过早收敛,难以全局寻优,相比之下本文提出AGA能有效地跳出局部最优解进行全局寻优,避免了早熟。两种算法辨识参数均方误差分别为1.0319×10-3和1.427×10-4。
3.2 模型参数的寻优结果
根据3年卫星在轨遥感测得的1095(每年按365天)组在轨电流数据和每天的太阳光照角的余弦值变化周期,结合式(1)~式(3)计算得出1095 组光照角为零的电流数据,利用GA和AGA对太阳能电池阵寿命预测的电流衰减模型的参数进行辨识,将辨识结果与参考文献[8]对比,结果如表1所示。
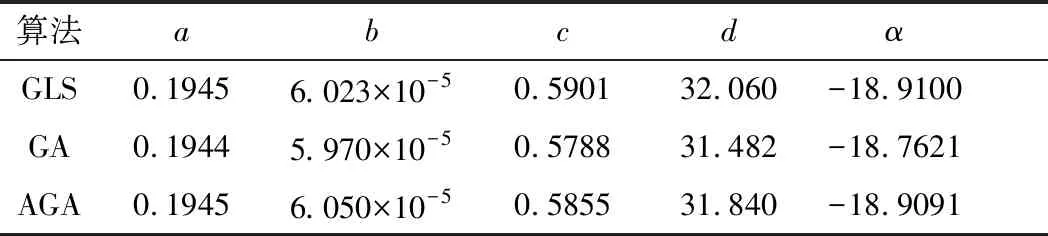
表1 模型参数辨识结果比较
如表1所示,AGA辨识后的参数相对于GLS的参数c,d均有明显变化,其中c反映模型衰减规律,d反映太阳辐射周期,而太阳辐射周期和衰减规律是影响模型的两个关键因素,从而使模型能更好地反映电池输出能力衰减的实际情况。
3.3 AGA辨识结果评价指标
采用3种算法对模型进行参数辨识,其辨识后的评价指标如表2所示。
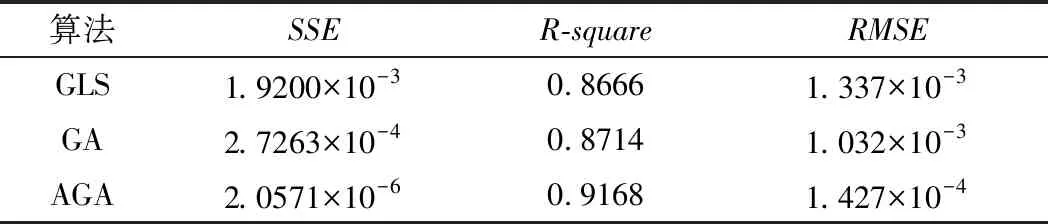
表2 模型参数辨识评价指标比较
从表2中可以看出:AGA仿真后的RMSE值最小值为1.427×10-4,SSE最小值为2.0571×10-6,明显优于GA和文献[8]的GLS辨识结果,所以AGA在太阳能电池阵寿命预测中参数辨识的能力优于GLS和GA。AGA的R-square也优于GLS和GA下的R-square值,说明AGA参数辨识后的模型与实测数据更接近。因此与GLS和GA相比较,AGA对模型的参数辨识效果更优。
3.4 太阳能电池阵寿命预测的时间比较
在相同预测电流值下,AGA算法辨识的电流衰减模型与GLS和GA参数辨识得到的模型进行时间预测并比较,对比结果如表3。
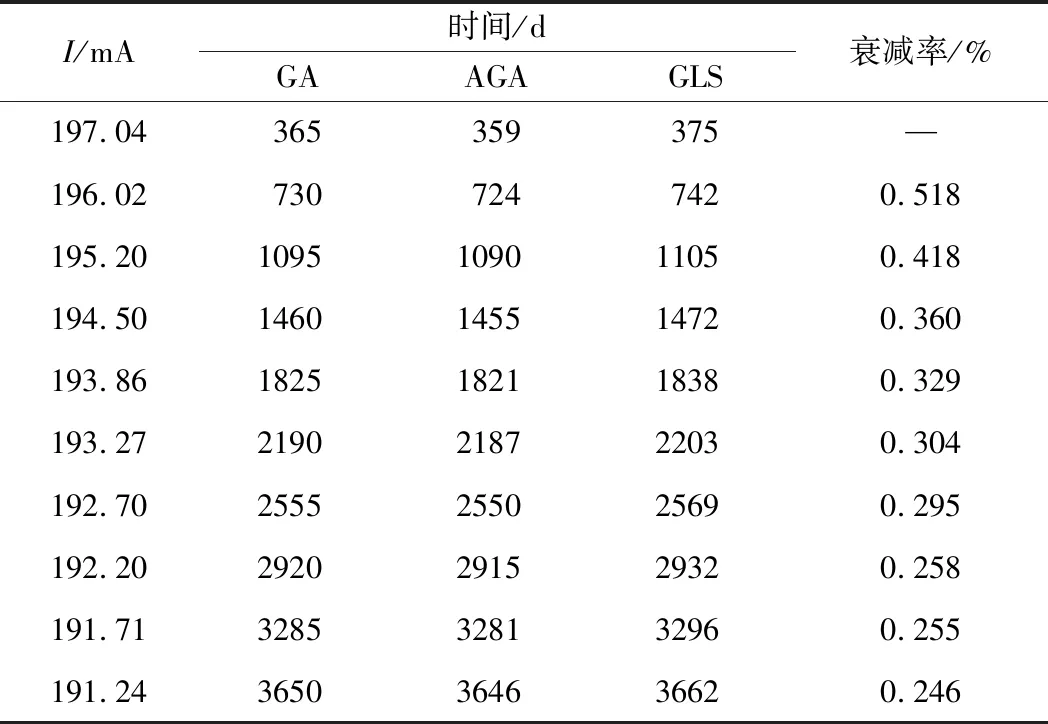
表3 辨识后模型寿命预测结果比较
表3电流表示参数辨识后的电流衰减模型预测电流,单位为毫安(mA)。时间表示在该电流下模型预测的在轨运行时间,单位为天(d)。衰减率为AGA算法模型辨识后每年电流衰减率。
由表3 可知,AGA辨识参数后的模型预测天数分别比GLS和GA提前16天和5天左右。在太阳能电池阵电流衰减模型预测计算下,太阳能预测电流的衰减会越来越慢。从第2年的0.515%、第3年0.418%,一直到第10年的0.246%。但随着衰减的逐年累加,使得太阳能电池阵输出能力逐渐降低,当太阳能电池阵的输出功率低于设定卫星的正常工作阈值时,则卫星电源失效。因此通过对输出功率的预测可以获得卫星的最大运行时间。这对卫星太阳能电源的设计和在轨运行管理提供了重要依据。
3.5 参数辨识后模型拟合效果
用3种算法辨识后的模型对太阳能电池阵输出电流进行预测,并与实测的电流数据进行拟合。拟合效果如图2所示。
由图2知,AGA参数辨识模型预测的电流与在轨卫星实测电流的拟合效果比GA和GLS拟合效果更好。尤其在卫星运行后期太阳能电池阵较大衰减后拟合效果更佳。也可以通过后期遥测数据对模型参数进行实时更新,使后期预测更加准确。通过式(12)计算拟合相对误差,对3种算法拟合效果进行评价:
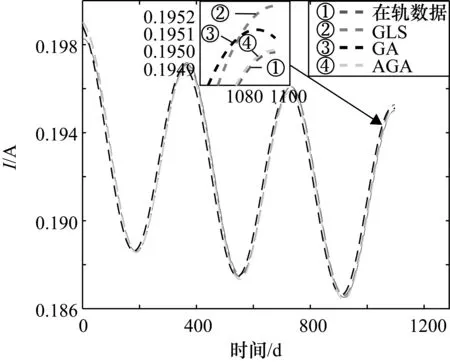
图2 3种算法辨识后拟合效果图
(12)

4 结束语
提出AGA对太阳能电池阵电流衰减的寿命预测模型进行参数辨识,与文献[8]对比,使用AGA辨识得到的误差平方和与均方根值分别为2.0571×10-6和1.427×10-4,更加趋近于0,R-square的值为0.9168,更加趋于1,参数辨识的精度更高。参数辨识后的模型预测电流与实测的数据拟合效果更好,尤其太阳能电池运行后期拟合效果更好,拟合相对误差rr为6.58×10-4。提高了太阳能寿命预测的准确性,可以避免卫星在轨运行后期因太阳能电池阵输出电流不足造成卫星和航天飞行器材电源故障,为在轨卫星太阳能电池阵列的设计和在轨卫星运行时电源管理提供参考。
猜你喜欢
科学大众(2022年23期)2023-01-30 07:03:44
计算机仿真(2022年8期)2022-09-28 09:53:02
中学生数理化·中考版(2022年6期)2022-06-05 06:49:10
中学生数理化·中考版(2021年6期)2021-11-22 07:52:30
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
小哥白尼(趣味科学)(2018年4期)2018-06-21 06:23:30
发明与创新(2016年6期)2016-08-21 13:49:36
中国塑料(2016年11期)2016-04-16 05:26:02
太阳能(2015年12期)2015-04-12 06:53:30
