
基于LabVIEWc值
2019-09-19 06:08:26
测控技术 2019年2期
(1.北京工业大学 机械工程与应用电子技术学院 先进制造技术北京市重点实验室,北京 100124;2.浙江亚太机电股份有限公司,浙江 杭州 311203)
近年来,卡钳集成式电子驻车制动系统在汽车上的应用愈加广泛[1],相关的性能检测试验台应运而生。卡钳集成式电子驻车制动系统卡钳部分主要由支架和将旋转运动转换为直线运动的丝杆螺母副组成;电子驻车制动(EPB)部分主要由直流电动机和减速机构组成[2]。EPB耐久试验台以卡钳集成式电子驻车系统为研究对象,在符合实车运转情况下,主要对卡钳、电动机部分做耐久试验[3]。在耐久试验过程中采集电流、电压、液压、力等试验数据,作为对卡钳集成式电子驻车系统性能分析的依据。图1为EPB耐久试验台工作流程图。
为保证车辆正常行车制动,摩擦片与制动盘之间有一定间隙[4]。驻车时,EPB带动卡钳的推力螺母先向前运动克服间隙后才能使摩擦片与制动盘接触,最终摩擦片压紧制动盘产生压紧力,在克服间隙过程中采集的电机电流数据称为驻车空转电流;释放时,EPB带动卡钳的推力螺母向后运动,使摩擦片脱离制动盘恢复间隙状态,在恢复间隙过程中采集的电流数据称为释放空转电流[5]。
算术平均数是统计学中最基本、最常用的平均指标,也称为均值[6]。空转电流算术平均数是评定EPB电动机合格与否及EPB质量的一项重要指标。
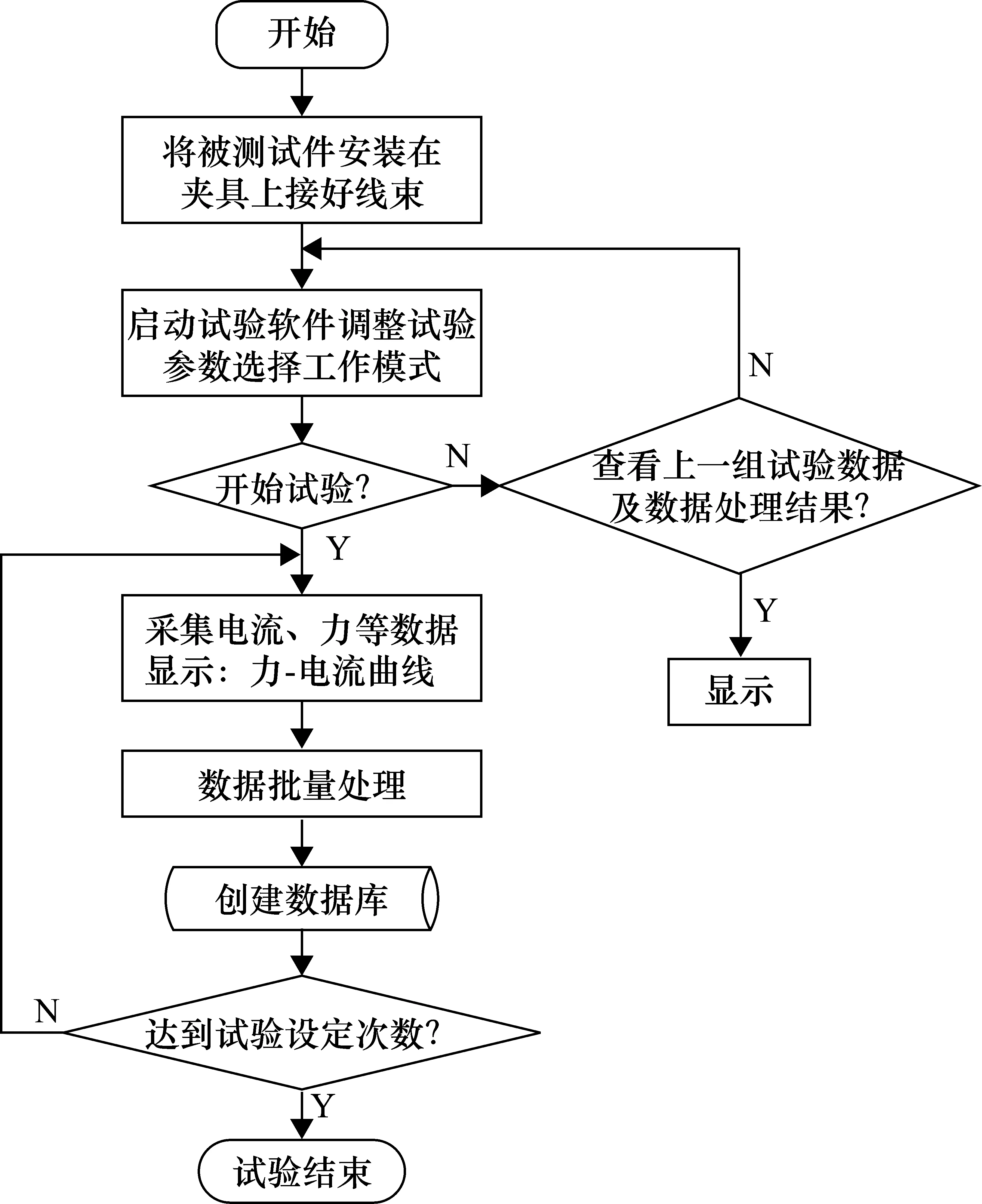
图1 EPB耐久试验台工作流程图
1 估算空转电流均值
设有一组数据为x1,x2,…,xn,则这组数据的简单算术平均数为
(1)
式中,μ为简单算术平均数;x为数值序列;n为x的元素个数。
LabVIEW均值模块如图2所示,均值模块可实现式(1)的计算效果。元素个数即空转电流开始时间与空转电流结束时间差值,元素和即空转电流开始时间与空转电流结束时间之间所有电流值的和,元素和与元素个数比值即为空转电流均值。从空转电流最值着手,找到电流初值和终值。
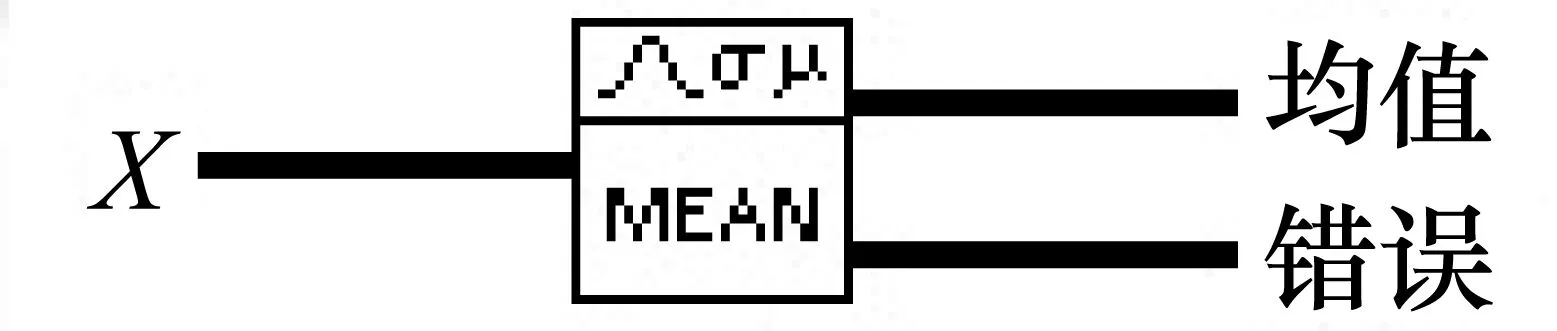
图2 LabVIEW均值模块
1.1 确定空转电流初值和终值
在EPB耐久试验台采集的100000组x1,…,xm…,xn电流数据中,假设第1组电流数据中xm元素为空转电流初值或终值,且对应时间为tm;第2组电流数据中第tm个的元素可能不是xm,且在第2组数据中,tm对应的电流值可能不是空转电流初值或终值。因此,对于批量处理数据而言,传统求均值的方式单纯以某一固定时间点索引电流数据作为空转电流初值或终值,不具有可行性。所以,如何确定空转电流初值和终值成为求空转电流均值的难点。为解决这一难题,采用“点积法”。截取驻车空转电流所在的时间段如图3所示。
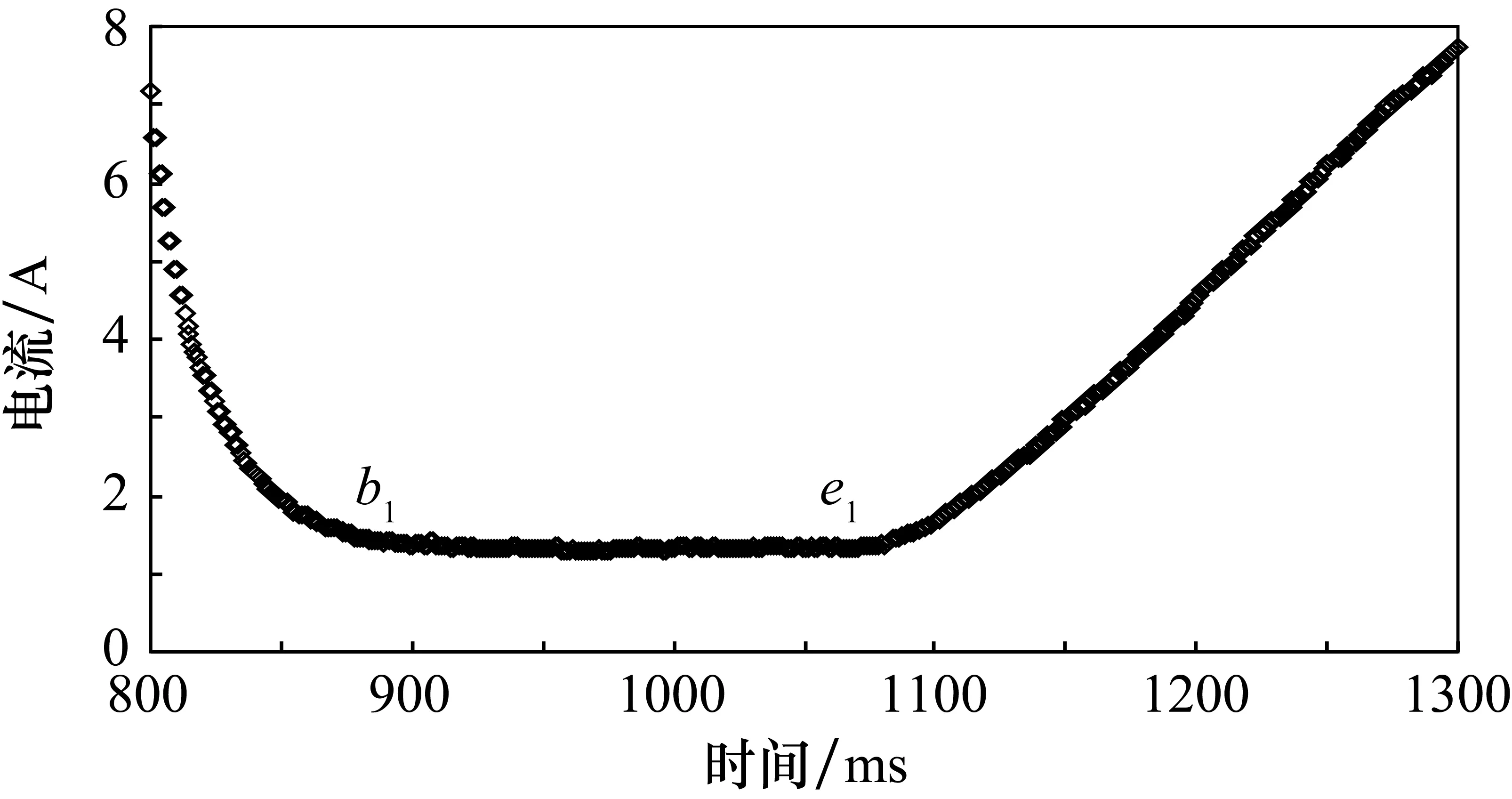
图3 EPB驻车空转电流所在数据段举例
首先使用LabVIEW数组最大值与最小值模块找到驻车空转电流所在数据段最小值Imin,即确定最小值点。如式(2)所示,由驻车空转电流最小值与常数相乘,乘积作为初值B1和终值E1。图3中,b1为驻车空转电流初值B1在电流数据图上对应的位置,e1为驻车空转电流终值E1在电流数据图上对应的位置。
B1=E1=C×Imin
(2)
式中,B1为电流起点值;E1为电流终点值;Imin为空转电流最小值;C为变量,驻车电流求解中可取1.01、1.02、1.1等大于1的值,在整定中C的选定不唯一, 只需达到理想结果就可以选定[7]。
对于确定释放空转电流的初值和终值,如图4所示,首先找到释放空转电流最大值Imax,即确定最大值点。如式(3)所示,由最大值与常数相乘,乘积作为释放空转电流初值B2和终值E2。图4中b2为释放空转电流初值B2在电流数据图中对应的位置,e2为释放空转电流终值E2在电流数据图中对应的位置。
B2=E2=C×Imax
(3)
式中,B2为电流初值;E2为电流终值;Imax为空转电流最大值;C为变量,可取0.8、0.9、0.95等小于1的值,选定原则如前所述。
EPB耐久试验台数据批量处理过程中,存在空转电流突变为0的情况,“点积法”同样适用。由于空转电流突变为0过程中数据量较少,因此一般选取电流曲线与时间轴交点处电流值0为空转电流终值。图5为驻车空转电流所在数据段,初值B3在电流曲线上对应位置为b3,终值E3在电流曲线对应位置为e3。图6为释放空转电流所在数据段,初值B4在电流曲线对应位置为b4,终值E4在电流曲线对应位置为e4。
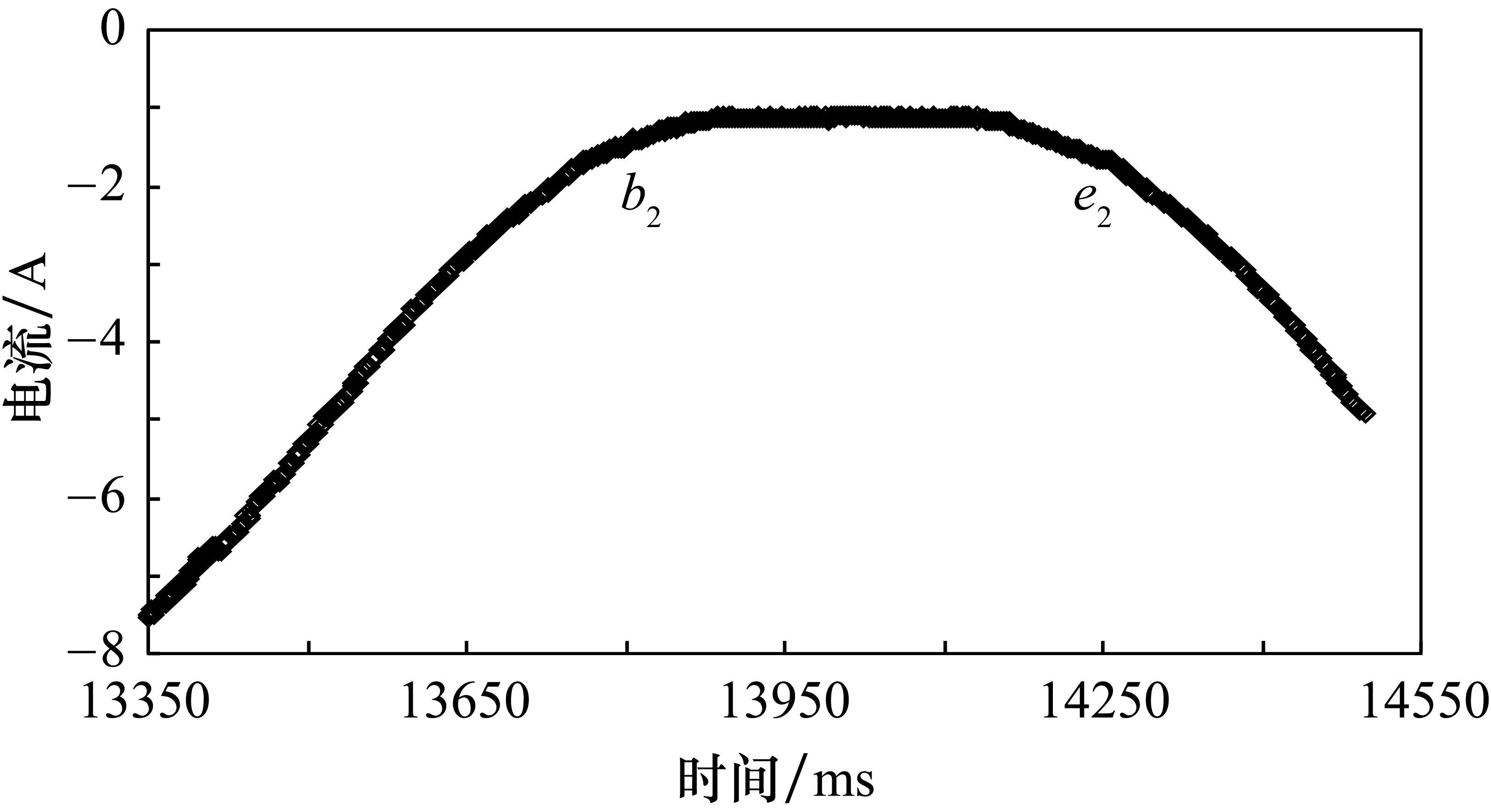
图4 EPB释放空转电流所在数据段举例
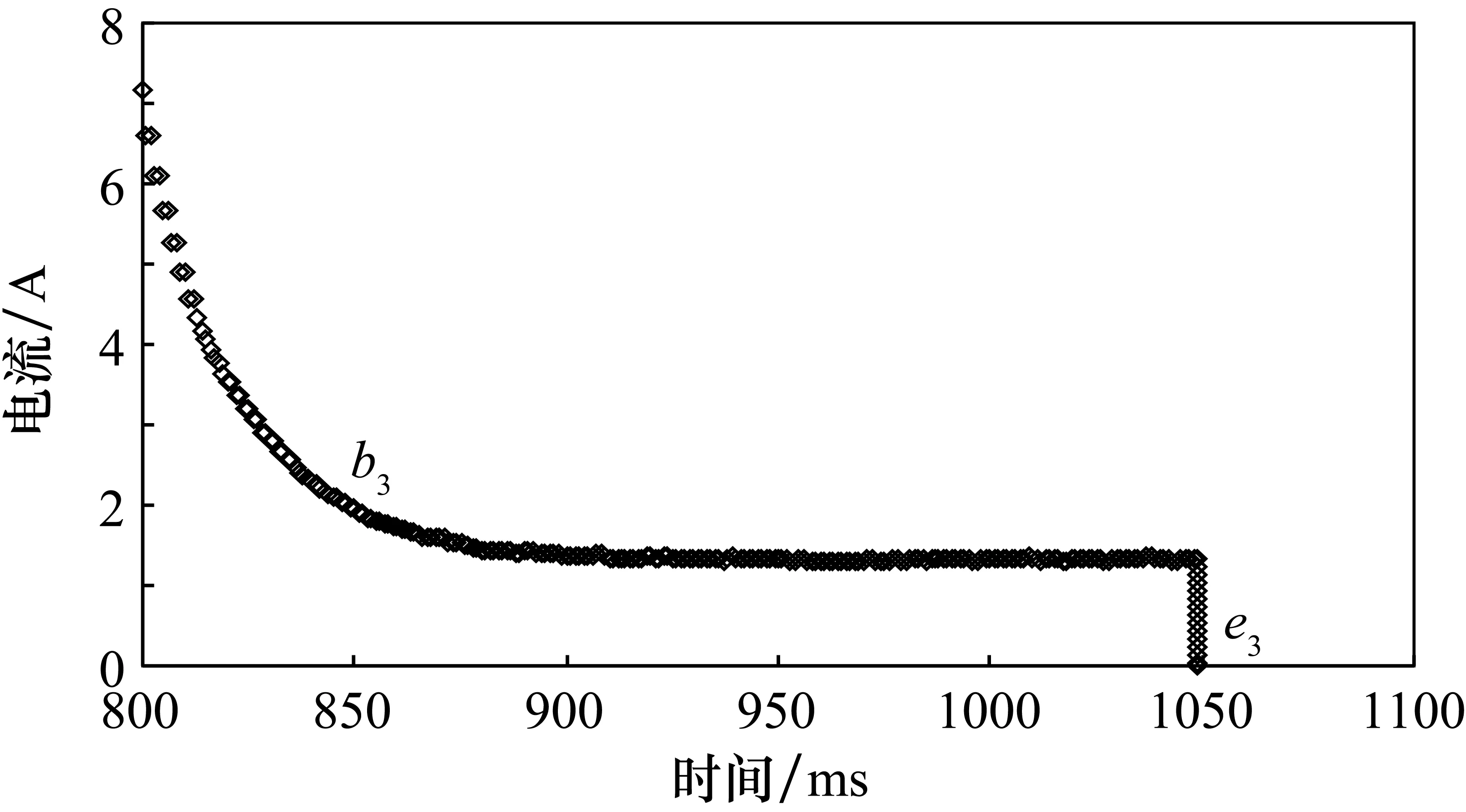
图5 EPB驻车空转电流数据截取图特例
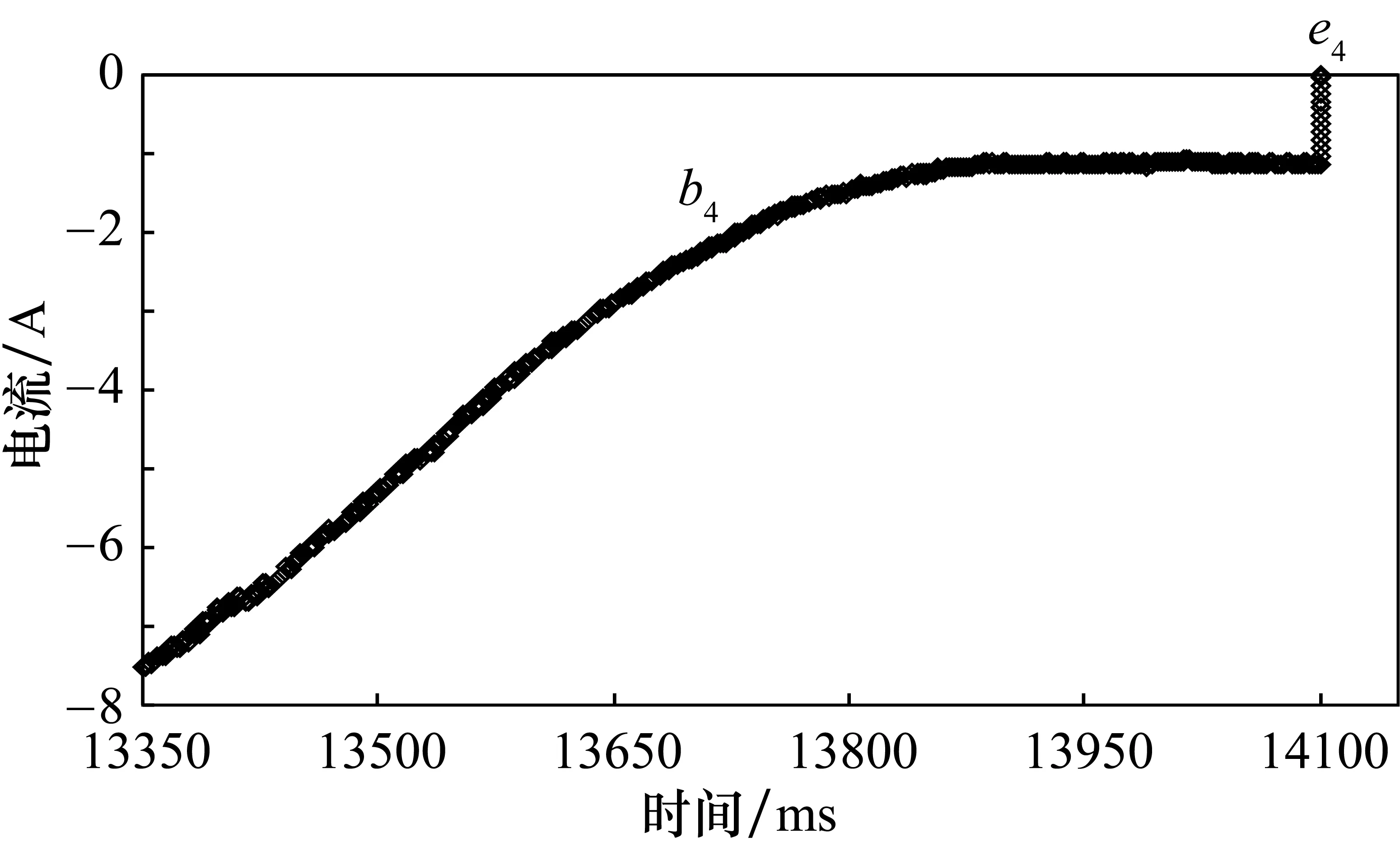
图6 EPB释放空转电流数据截取图特例
1.2 确定空转电流初值和终值对应的时间
索引值在数组中对应的时间,在LabVIEW中应用以阈值插值一维数组模块。通过空转电流初值和终值找到这两个参数对应的时间。
图7为以阈值插值一维数组模块图。图8为以阈值插值一维数组模块在具体程序中应用举例。
表1为应用以阈值插值一维数组模块输出结果及说明。阈值y是使用“点积法”求得的空转电流初值和终值。
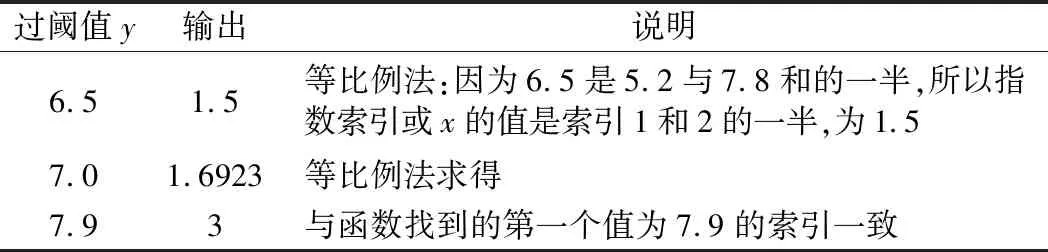
表1 以阈值插值一维数组模块输出结果
通过此模块可得到空转电流初值和终值所对应的时间。对于数组非降序排列部分需要取负,之后便可继续使用以阈值插值一维数组模块处理。
2 估算驻车空转电流均值程序框图
图9为EPB耐久试验台采集的一组电流数据图。依据前述“点积分”思想,应用LabVIEW编程。图10为估算驻车空转电流均值程序框图。表2为程序运行结果汇总。
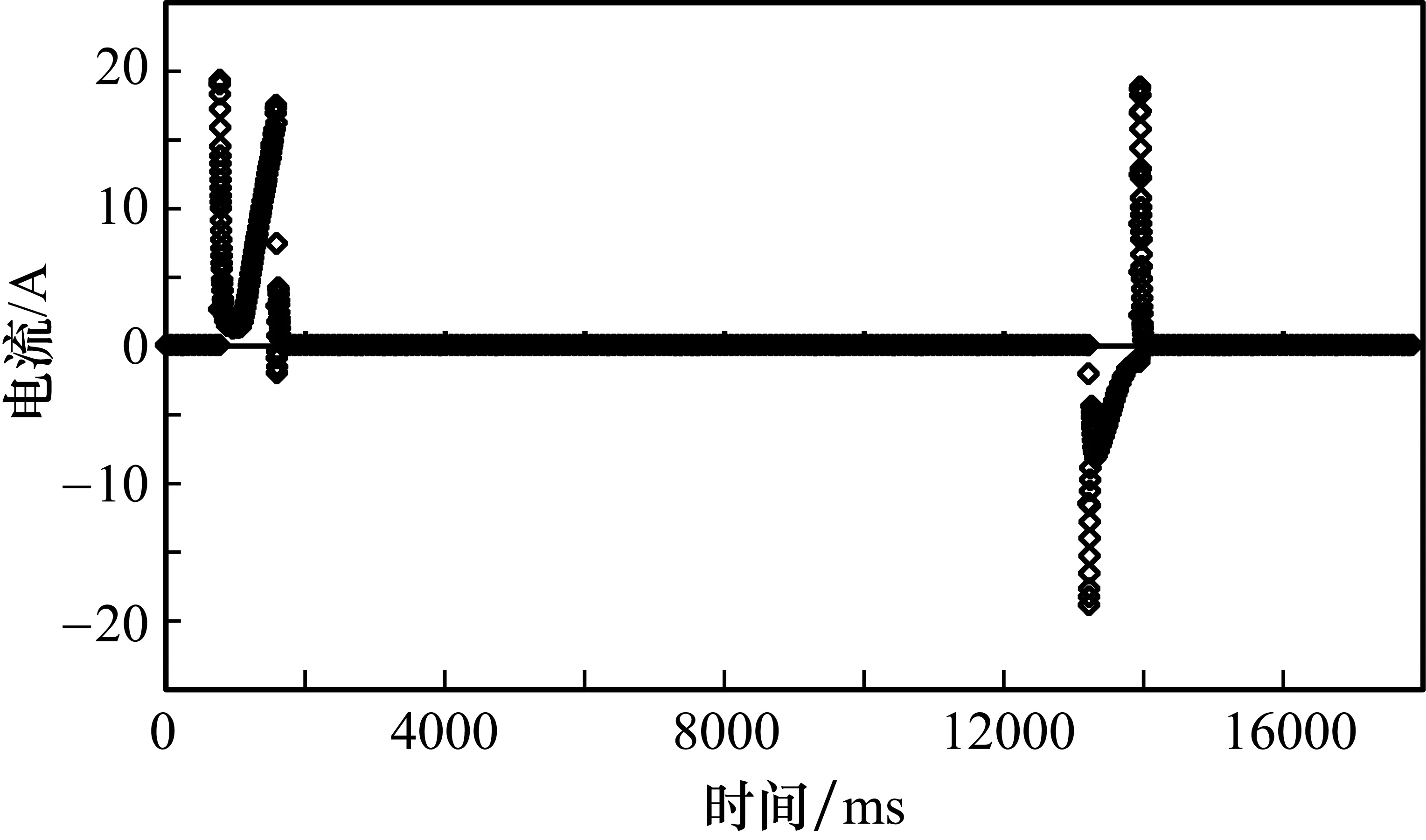
图9 一组电流数据散点图
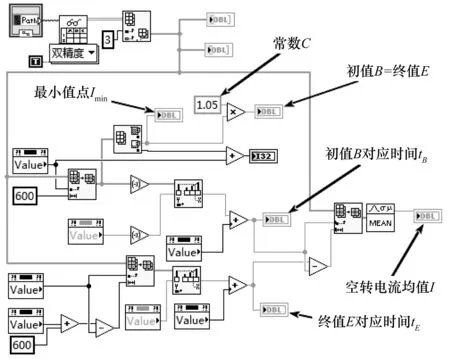
图10 估算驻车空转电流均值程序框图

CImin/AB/AE/AtB/mstE/msI/A1.051.2991.3641.36487810791.365
3 结束语
本文系统分析了估算空转电流均值的算法, 概括了“点积法”的基本框架,并选择了一种索引空转电流初值和终值对应时间的方法。与其他求均值方法相比,基于LabVIEW估算均值的方法有以下优点:① 在理论研究和实际应用中整个算法都比较成熟;② 计算效率高,为批量处理数据开阔了思路,计算精度满足数据分析的要求;③ 通用性好,大数据初值B和终值E浮动范围大,“点积法”从数据最值点Imin和Imax着手,由最值点Imin和Imax确定数据段的初值B和终值E,克服了传统求均值方法在大数据中难以直接确定数据初值B和终值E的问题。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09 11:33:30
科技与创新(2018年19期)2018-10-13 02:45:24
制造技术与机床(2017年9期)2017-11-27 02:13:46
债券(2017年5期)2017-06-02 14:57:24
中国国情国力(2016年1期)2016-11-26 04:07:15
西藏科技(2016年10期)2016-09-26 09:02:12
汽车之友(2016年10期)2016-05-16 22:00:12
工业设计(2016年6期)2016-04-17 06:42:50
山西大同大学学报(自然科学版)(2016年6期)2016-01-30 08:29:38
汽车维修与保养(2013年11期)2013-07-25 05:30:26
