
永磁同步直线电机推力波动的模糊预测抑制研究
2019-09-19 08:15殷红梅刘永利盛定高汪木兰
微电机 2019年7期
殷红梅 ,刘永利,盛定高, 汪木兰
(1.淮安信息职业技术学院,江苏 淮安 223003;2.南京工程学院 江苏省先进数控技术重点实验室,南京 211167)
0 引 言
近年来,随着计算机技术的迅猛发展,永磁同步直线电机(Permanent Magnet Linear Synchronous Motor,PMLSM)已经被许多高速、超高速数控机床普遍使用,而其由边端效应等产生的推力波动抑制成为直线电机需要攻克的又一个技术难题。对于其抑制途径,除通过优化结构设计改善推力扰动之外,运用先进的控制策略已经被证明为一个行之有效的手段[1]。自适应控制、神经网络控制、预测函数控制等多种先进的控制策略都被运用在直线电机的速度控制上。其中,预测函数控制理论(Predictive Functional Control, PFC)凭借其预测模型的多样性、滚动优化的时变性以及在线校正的鲁棒性,被越来越多的运用在工业过程控制场合[2]。东南大学周磊等将预测函数控制算法与模糊控制算法有机结合,围绕永磁直线同步电机速度控制尝试性提出了基于模糊预测函数控制的速度控制方法,并通过了仿真验证,为本文研究提供了灵感[3]。中国科学院的邓永停等则直接提出了基于预测函数控制与扰动观测器的永磁直线同步电机的速度控制策略,试验结果表明可以有效的抑制扰动,提高系统转速跟踪精度[4]。本文围绕引起直线电机速度非线性动态变化的推力扰动展开研究,运用预测函数控制算法,结合干扰观测器,实现直线电机推力波动的在线观测与反馈矫正,尝试提出一种基于新型模糊预测函数控制的永磁直线同步电机推力波动控制方法,减小推力波动,改善直线电机的推力特性。
1 预测函数控制原理
预测函数控制(PFC)是在模型预测控制(Model Predictive Control, MPC)基础上发展起来的第三代预测控制,因其算法简单、动态响应与跟踪性能好等特点被广泛运用于快速响应与精密复杂的工业控制场合中。预测函数控制将输入结构化,运用基函数的线性组合设置控制输入,同时将基函数与响应对象后的加权组合作为系统输出,通过制定规则进行在线优化,调整得出线性加权系数,由此得出下一时刻的控制输入[3],而增加了基函数选择与参考轨迹两大环节的PFC控制算法更加适合于快速动态响应系统的控制。PFC 基本原理结构图如图1所示。
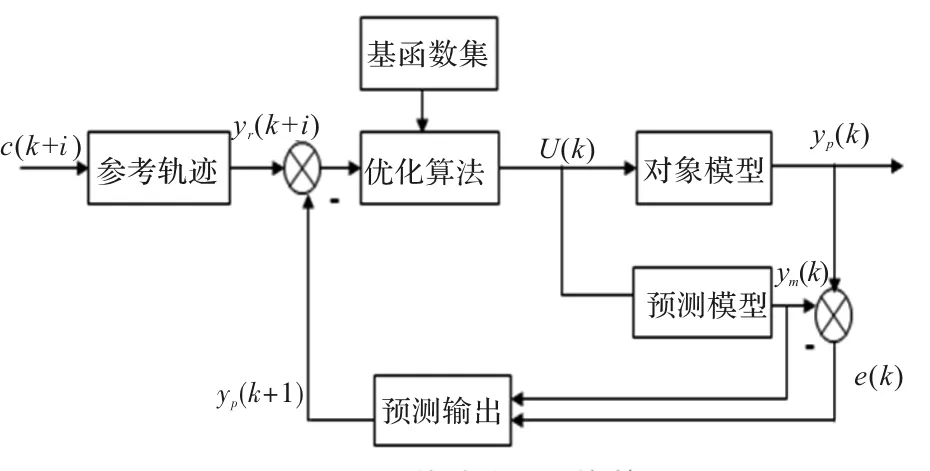
图1 PFC 基本原理结构图
其中,基函数的选择取决于被控对象和拟跟踪设定值的特性,很显然,基函数越少,计算工作量越小,但控制精度也越低。通常基函数可选取阶跃函数、斜坡函数、抛物线函数等。在PFC算法中,基函数选择原则:被控区间内设定值变化率≤N(某一确定值),控制输入的结构选取基函数选取个数为1个,被控区间内设定值变化率>N,基函数选取个数为2个。根据系统闭环设计要求确定参考轨迹,在保证系统相对稳定的前提下,采用一阶指数函数:
yr(k+i)=c(k+i)-γi(c(k)-yp(k) ),
(i=1,2,…H)
(1)

2 PMLSM电机推力波动数学模型建立
2.1 PMLSM电机的数学模型
本文采用矢量控制技术对PMLSM进行控制,为适应电机的旋转运动规律,需要将常规A、B、C三相平面静止坐标系通过Clarke变换与Park变换转换为旋转坐标系,电动机的各个空间矢量转化为静止矢量即直流量,由此实现矢量控制[6]。永磁同步直线电动机在 旋转坐标系上的电压方程为
(2)
式中,ud、uq为d、q轴电枢电压;id、iq为d、q轴电枢电流;R为电流系数;ψd、ψq为d、q轴磁链;ω=πv/,ω为直线电动机运行对应的电气角速度,v为直线电动机的极距; 为直线电动机的直线运动速度。
理想情况下,直线电动机的三相绕组完全对称,气隙磁场正弦分布,在此前提下的电压方程如下:
(3)
式中,p为微分算子;ψf为次级永磁体励磁磁链;R为电阻;Ld、Lq为d、q轴电枢电感,对于表面贴装式永磁同步直线电动机,Ld=Lq。
将电压方程代入永磁直线同步电动机输入总功率方程,并将气隙g引入总功率的微分式中,可以得出最终总功率为
(4)
采用id=0的矢量控制策略,电磁推力可表达为
(5)
永磁同步直线电动机在d-q旋转坐标系上的电压方程及磁链方程如式6所示,即为PMLSM电机的数学模型。
(6)
2.2 PMLSM电机推力波动数学模型
推力波动数学模型采用常用数学模型[7]:
(7)
从文献[7]中得知,推力波动可以根据其扰动波形,分析各谐波分量与速度之间的关系,推导出推力波动细化模型:

(8)
(9)
(10)

由此得出下文中模糊控制器推力波动的补偿模型:
(11)
3 PMLSM电机推力波动模糊预测控制
模糊控制算法是一种不过分依赖于数学模型的先进控制方法,由于直线电机控制系统需要良好的应对时变的控制策略以及鲁棒性,该算法经常被运用在非线性系统中[8]。接下来将具有参数自调整功能的模糊控制与预测函数相结合,根据控制系统的速度偏差和偏差变化率,利用模糊控制器的在线修正功能对直线电机的推力进行控制,重点抑制换相推力波动,使直线电机获得平滑的推力特性,且能跟踪给定推力指令的变化。具体设计思路:在速度环设计专用模糊预测函数控制器,根据上述的推力波动模型进行扰动补偿,计算预测函数控制量与模糊补偿量的矢量和,形成基于模糊控制器的新型模糊预测控制函数。综合了预测函数与模糊控制器的直线电机推力波动控制系统如图2所示。
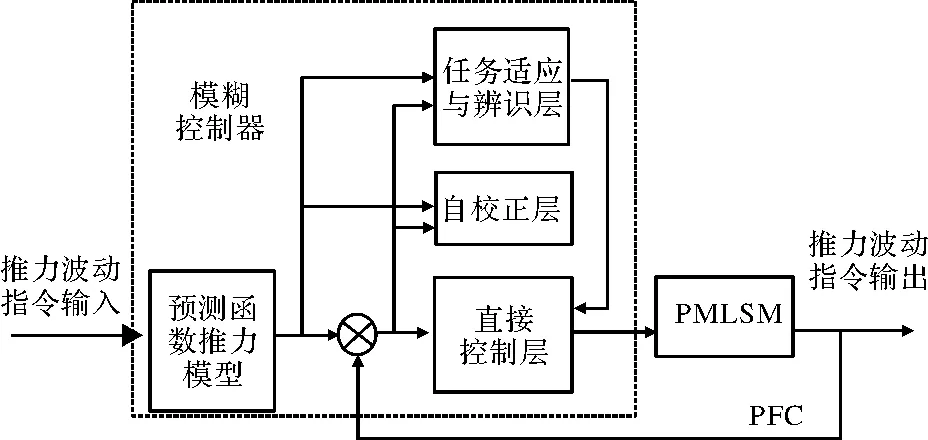
图2 基于预测函数与模糊控制器的直线电机推力波动控制系统逻辑框图
3.1 推力波动预测函数控制
在使用预测函数进行推力波动的控制过程中,其控制作用无论何时都表现为一组基函数的组合,同时保持与过程特性以及推力波动跟踪设定值实时相关。将预测模型函数输出分解成模型自由响应Xm(k)与强迫响应Ym(k)两部分,采用离散状态空间表达式:
(12)
则k+i时刻系统的状态向量为
+…+AmBmu(k+i-2)+Bmu(k+i-1)
(13)
结合基函数可推导得出k+i时刻的预测函数推力波动输出模型为
(14)
为了防止推力波动控制过程中控制量发生大幅度变化,本文依然使用柔化设定值来推导优化目标函数表达式,再根据推力波动跟踪阶跃设定值,优化得出k时刻的推力波动控制量为
μ(k)=k0(c(k)-y(k)+vxXm(k)
(15)

3.2 推力波动模糊补偿控制
模糊控制算法首先要根据采样结果得到模糊控制器的输入变量,将输入变量的精确值模糊化,再根据模糊输入变量及计算规则得出模糊控制量,最后将模糊控制量非模糊化得出精确量。其中模糊规则的选择至关重要,本文采用结合了模糊控制器输入与输出双重终端的模糊规则,提高系统控制精度,如表1所示。
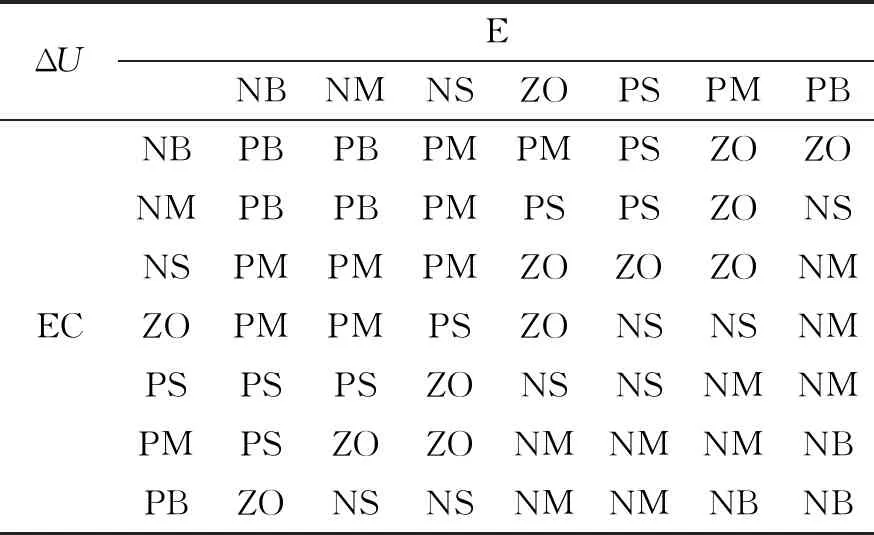
表1 模糊规则表
设推力波动偏差e的量化因子为F1,偏差变化率的量化因子为F2,系统输出比例因子为F3,推力波动参数在线调整的规则为:当误差与误差变化率较大时,量化因子取较小值,比例因子取较大值,以此来保证系统的快速响应;当误差与误差变化率较小时,量化因子取较大值,比例因子取较小值,二者协调控制,避免系统发生超调现象。本文设计的模糊控制器采用双输入单输出形式,输入为t时刻过程输出的推力波动偏差e(t)和偏差变化率ec(t),过程存在k步延迟,则系统输出Δu由e(t+k))和ec(t+k)确定。二者可由预测模型和参考轨迹算出。经过“量化因子”和“比例因子”的变换,偏差e、偏差变化率ec和系统输出Δu可转化为偏差E、偏差变化率EC和系统输出Δu的模糊论语:
E={-6,-5,-4,-3,-2,-1,1,2,3,4,5,6}
EC={-6,-5,-4,-3,-2,-1,1,2,3,4,5,6}
Δu={-3,-2,-1,0,1,2,3}
两个输入模糊变量和输出控制量的隶属函数均为三角形,为了提高系统控制精度,采用不均匀分布,e(t+k)、ec(t+k)与Δu通过模糊规则表紧密联系,通过参数自调整规则表加以校正。参数自调整如表2[9-10]所示。
表2参数自调整规则表
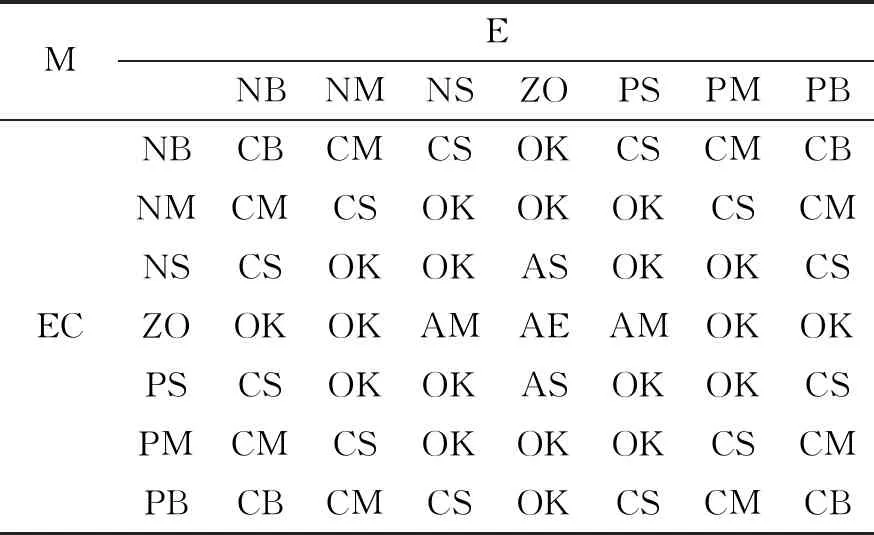
MENBNMNSZOPSPMPBECNBCBCMCSOKCSCMCBNMCMCSOKOKOKCSCMNSCSOKOKASOKOKCSZOOKOKAMAEAMOKOKPSCSOKOKASOKOKCSPMCMCSOKOKOKCSCMPBCBCMCSOKCSCMCB
其中,{NB、NM、NS、ZO、PS、PM、PB}为偏差、偏差变化率以及系统输出语言变量的模糊子集,{AB AM AS OK CS CM CB }为放大倍数语言变量M的模糊子集。
4 实验仿真
为了验证上述控制算法的正确性,本实验运用Simulink试验环境进行仿真试验,借助江苏省先进数控技术重点实验室的基于DSP的数控机床直线电机伺服系统试验平台进行试验论证。试验平台主要由PMLSM、光栅尺、传感器系列、伺服驱动设备以及推力测量装置等组成,电机动子电阻Rs为8.58 Ω,粘滞摩擦系数B为0.2 Ns/m,额定推力Fn设置为548 N,基函数采用阶跃函数H,优化时域H1=10,H2=20,参考轨迹的闭环响应时间Tr为0.1 s,采样时间Ts为0.001 s,试验原理框图见图3所示。
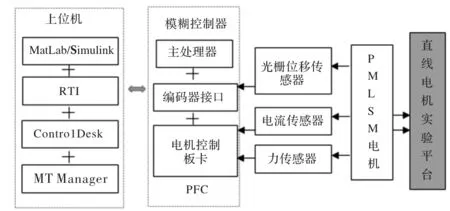
图3 实验原理系统框图
在空载和突加扰动中选择更具有说服力的突加扰动进行推力波动补偿试验。采用id=0策略,将电机转速跟踪设置为给定值。将电机动子往返速度设定为150 mm/s,加速度为2 g, 采样周期为1 s,通过仿真实验获得模糊控制器补偿前后的推力波形,如图4所示。
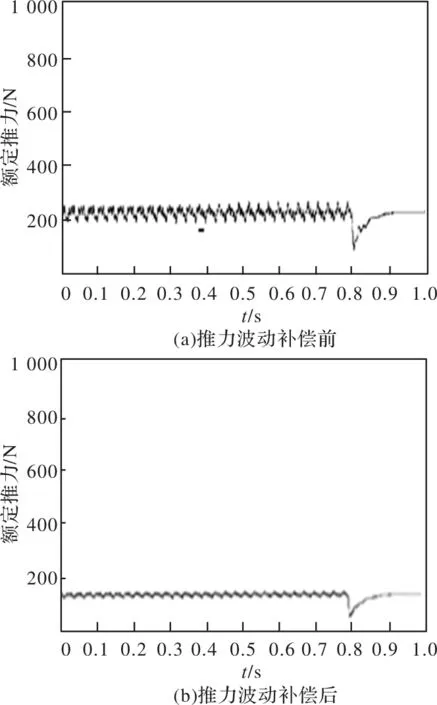
图4 基于预测函数模糊控制器补偿前后的推力波形
从图4可知,经过预测函数模糊控制器的扰动补偿后,推力波动波形趋于平稳,动子速度平稳性得到改善。经计算,推力波动补偿值达38.6%。仿真试验结果表明,采用基于PFC的模糊控制策略可以有效地改善直线电机的推力波动,提高电机速度的平稳性与轨迹跟踪的精确度。
5 结 语
本文致力于为直线电机的推力波动抑制提供理论与实践参考,针对PMLSM电机推力波动的抑制问题展开研究,运用PFC理论,结合模糊控制,设计了一种基于PFC的模糊控制器,通过分析预测模型与推力波动偏差,运用模糊控制的参数自调整功能,与预测函数控制优势共同实现推力波动的抑制。经试验论证,PMLSM电机推力波动幅值得到有效降低,抑制后的电机速度更加平稳,是一种可行的抑制推力波动方法。
猜你喜欢
农业灾害研究(2022年6期)2022-08-29
汽车实用技术(2022年15期)2022-08-19
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
成都信息工程大学学报(2021年6期)2021-02-12
初中生世界·九年级(2020年9期)2020-09-21
电子制作(2019年16期)2019-09-27
软件导刊(2015年1期)2015-03-02
中学生理科应试(2014年12期)2015-01-15
