
基于模糊规则的发动机-发电机组协调控制
2019-09-19 08:15徐浩轩刘春光赵其进
微电机 2019年7期
徐浩轩,刘春光,赵其进
(陆军装甲兵学院 兵器与控制系,北京 100072)
0 引 言
近年来,混合动力电传动车辆成为电传动车辆领域的研发重点,其中,串联式混合动力系统在许多重型车辆中得到广泛运用。自二十世纪末以来的重型电传动车辆大多采用串联式混合动力系统,即由发动机-发电机组、蓄电池或其他能量补偿装置并联为车载综合电力系统供电[1-2]。
发动机-发电机组作为串联式混合动力系统中主要的电源类型之一,一般作为混合动力电传动车辆的主动力源。当车辆的负载需求发生变化时,发动机需要根据最佳功率-燃油特性曲线调整转速以满足负载功率需求的同时降低油耗[3]。此时,发动机与发电机转矩-转速外特性的差异造成调速过程缓慢,车辆负载功率需求陡增时容易导致发动机转速震荡甚至熄火。文献[4]等从能量管理层面制订了功率分配策略,减弱了负载变化带来的冲击,但从电机控制策略出发对协调控制策略的研究较少。文献[5]则通过改进机械传动装置解决并联式混合动力系统发动机-发电机组的协调控制问题,但这种方法由于车载综合电力系统结构与电气传动装置的差异不适用于串联式综合电力系统。
本文针对发动机-发电机组在调速过程中的不协调问题,结合车载综合电力系统的能量管理,设计了基于模糊规则的发电机电磁转矩控制策略,使发动机-发电机组在保证综合电力系统电能质量的同时,加快调节速度,避免发动机转速震荡和熄火。并通过基于Matlab/Simuink的综合电力系统联合仿真验证了该控制策略。
1 发动机-发电机组协调控制的基本原理
以一种由发动机-发电机组、蓄电池和超级电容器组成的典型串联式车载综合电力系统为例,其控制结构如图1所示。多电源联合为综电系统母线供电,发动机-发电机组轴转速由能量管理模块根据功率-最佳燃油特性曲线查表给出,发动机-发电机组输出功率通过控制发电机的电磁转矩确定[6]。

图1 综合电力系统控制结构
当负载需求功率大幅提高时,为满足负载用电需求,发动机增大输出转矩进行调速,发电机电磁转矩给定值增大,且同转速下发电机转矩响应速度比发动机更快。如图2所示,发电机转矩外特性高于发动机转矩外特性。

图2 发动机与发电机转矩外特性
发动机-发电机组调速过程中的转矩-转速关系表达式为
(1)
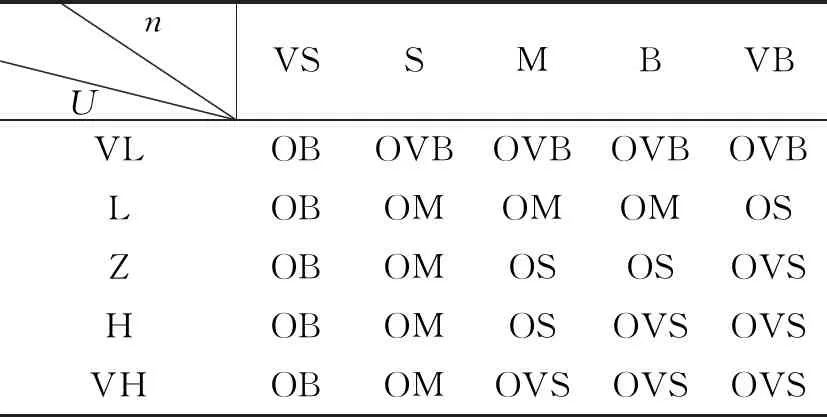
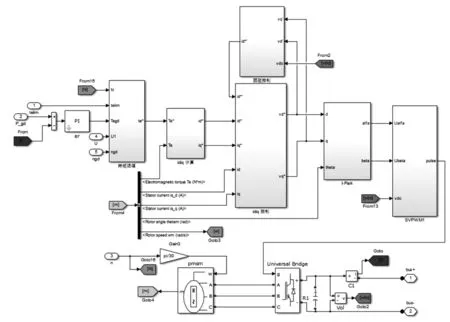
式中,T为发动机输出的动力矩,Te为发电机的电磁转矩,J为发动机-发电机轴的转动惯量,Δω为轴转速变化量。由于电磁转矩作为负载转矩,在调速过程中大于发动机的动力矩,造成发动机轴转速震荡甚至堵转。在这种综合电力系统的控制模式下,要加快发动机的调速过程使之更快到达给定工作状态,可以通过限制发电机电磁转矩给定值来实现,通常设定相同转速下电磁转矩上限为发动机最大转矩的K(0 (2) Pe=ωTe (3) 即: (4) Pe=KωT (5) 式中,Pe为发电机输出到母线的功率,其大小变化主要反映为母线电压的变化。发电机输出功率较小时,母线电压下降;输出功率满足负载需求时,母线电压稳定在额定值。可以看出,K值越大,电磁转矩给定的限幅对于发动机-发电机组的功率输出限制越小,同时发动机调速也越慢;K值越小发动机调速越快,但对发动机-发电机的功率输出限制越大,影响综合电力系统母线电压的稳定。因此,选择发电机电磁转矩给定值的限幅必须同时考虑其对调速和稳压两方面的影响,不宜太大也不宜太小。 目前,电磁转矩限幅参数K的取值一般通过经验选取适当的常值,但这种转矩限幅方法在发动机-发电机组功率调节幅度较大时,无法充分利用综合电力系统中的其他能量补偿装置,快速完成调速;在功率调节幅度较小时,又过分限制了发动机-发电机组的输出功率造成母线电压不必要的跌落。 因此,在综合电力系统不同的工作状态下选取不同的电磁转矩限幅条件对于发动机-发电机组协调控制、提高母线电能质量具有重要意义。 为更好的控制发动机-发电机组根据能量管理策略进行调速和功率输出,就必须根据综合电力系统的状态,调整发电机电磁转矩限幅参数K,维持发电机电磁转矩在可控范围。协调控制的主要目标: (1)发动机-发电机轴转速调节尽量快,快速达到能量管理策略给定的转速以降低油耗。 (2)母线电压波动尽量小,保持较高的电能质量,维持车辆运行的安全稳定。 在实际控制中,由于“母线电压波动范围大”、“发动机-发电机调速快”等概念并没有严格的约束条件来界定,采用模糊控制对此类问题有较好的鲁棒性和适应性,因此本文采用Mamdani型模糊控制调整K值实现发动机-发电机组的协调控制。 模糊控制系统采用两输入一输出的Mamdani型模糊控制器,输入为调速幅度Δn的表达式和母线电压偏离值ΔU的表达式,输出为电磁转矩限幅系数K。调速幅度Δn和母线电压偏离值ΔU的表达式为 (6) (7) 式中,ngd为发动机-发电机组调速的目标转速,n为实际转速,U为母线电压,U0为母线电压的稳压目标值。Δn与ΔU分别反映系统当前状态下的转速和母线电压与调速完成后稳定状态值的偏差。模糊控制器中输入输出变量的模糊集及论域如下: (1)调速幅度Δn的模糊集及论域 模糊集为:VS,S,M,B,VB; 论域:{2,3.5,5.5,7.5,9} (2)电压偏离量ΔU的模糊集及论域 模糊集为:VL,L,Z,H,VH; 论域:{-4,-2,0,2,4} (3)电磁转矩限幅参数K的模糊集及论域 模糊集为:OVS,OS,OM,OB,OVB; 论域:{0,0.3,0.5,0.7,1} 各模糊子集隶属度函数和隶属度分布如图3所示。 图3 模糊控制器输入输出的隶属度函数 由图4所示模糊控制器输入输出关系可知,模糊规则是模糊控制器设计的核心,根据模糊输入输出的定义和对调速与功率输出综合优化的总体思想,制定了如表1所示的模糊规则。 图4 模糊控制器输入输出关系 表1 模糊规则 各命题模糊蕴含关系的计算公式为 R(x,y,z)=X(x)∧Y(y)∧Z(z)= (X(x)∧Y(y))∧Z(z) (8) 近似推理算法采用Zadeh算法,即取大-取小算法,计算公式为 (9) 通过这种方法,可以得出根据调速幅度和功率输出能力制订的电磁转矩限幅K,并控制它根据系统工作状态变化以满足系统需求,基本实现发动机-发电机在车辆需求功率变化过程中的协调控制。 本文采用Matlab/Simlink搭建如图1中控制结构的综合电力系统模型,选定各元件参数如表2所示,发电机仿真模型框图如图5所示,转矩限幅的模糊控制模块如图6所示。 表2 参数选定 图5 发电机仿真模型 图6 转矩限幅的模糊控制 仿真实验通过对比发动机-发电机组的调速性能和综合电力系统母线电压的稳定性来评测不同控制方法下的电磁转矩限幅策略。本文选取:最有利于发动机调速的电磁转矩低限幅策略,即在调速过程中电磁转矩限幅参数取较小值,实验中取K=0.2;根据经验得出的最优限幅值K=0.78;和根据模糊规则控制的限幅参数来进行对比。 图7 发动机-发电机组轴转速调节 对于调速性能来说,不同控制策略对于小幅度调速影响不显著,因此本文仅对比从怠速状态到最大转速的大幅度调速过程。如图7所示,发动机-发电机组起动后在1s时达到怠速状态下的1000r/min,在2s时,负载需求功率陡增,能量管理策略给定发动机输出转速为2100r/min。当转矩限幅参数K=0.2时发动机-发电机组调速最快,采用模糊控制略慢于低限幅条件下的调节速度,K=0.78则更多的考虑母线电压的稳定性,因此调节最缓慢。虽然采用低限幅的电磁转矩限幅参数调速较快,但还应考虑其对母线电压的影响,如图8所示。 图8 大幅度调速时的母线电压变化 可以看出,虽然低限幅条件下调速较快,但母线电压下降严重,甚至低于蓄电池的输出电压650V,导致电流变换装置处于失控状态,对蓄电池寿命造成损害。而K=0.78时,母线电压相对可以维持在安全范围内,这也是选择它作为经验最优值的原因。但由于发动机-发电机组的调速性能差,回升至稳态的速度缓慢。采用模糊控制既保持了电压稳定在安全范围内,又极大的加快了电压回升至稳态的调节速度。 同时,在发动机小幅度调速时,虽然各方法对转速调节时间影响并不显著,但对母线电能质量的影响不能忽略,如图9所示。 图9 小幅度调速时的母线电压变化 此时,采用小限幅系数限制了发电机的输出能力,母线电压振幅较大,而采用较大限幅系数和采用模糊控制的限幅使母线电压变化较为平缓。 综上所述,采用基于模糊规则的电磁转矩限幅策略能够加快发动机-发电机组的调节速度,稳定母线电压,相比其他控制方式,更有利于实现发动机-发电机组的协调控制。 通过仿真验证,采用模糊控制的方法控制发电机电磁转矩对于优化发动机-发电机组协调控制效果显著,为通过调节电机工作状态以维持发动机工作在低油耗状态、提高混合动力电传动车辆的母线电能质量提供了依据和参考。
2 电磁转矩的模糊控制




3 建模与仿真验证
3.1 仿真模型的建立


3.2 仿真实验验证



4 结 论
猜你喜欢
中国核电(2021年3期)2021-08-13
煤气与热力(2021年3期)2021-06-09
科技信息·学术版(2021年7期)2021-01-10
煤矿机电(2020年5期)2020-11-02
中国新技术新产品(2019年5期)2019-05-21
课程教育研究·学法教法研究(2018年20期)2018-08-11
科学与财富(2016年29期)2016-12-27
科技创新导报(2016年20期)2016-12-14
山东工业技术(2016年15期)2016-12-01
中国信息化·学术版(2013年4期)2014-01-03
