
飞机货舱行李输送装置运动轨迹仿真
2019-09-13 03:37张长勇沈乐刚
计算机应用与软件 2019年9期
张长勇 沈乐刚 冯 冰
(中国民航大学电子信息与自动化学院 天津 300300)
0 引 言
传统飞机货舱行李的搬运采用人工搬运的方式,这种搬运方式效率低下,劳动强度大,运行成本高,对于日益增长的旅客运输量和货邮吞吐量,提高货物的搬运效率是非常迫切的[1],因此设计了一款飞机货舱行李输送装置。飞机货舱行李输送装置是一种采用铰接结构连接的多电动滚筒组合的运输装置,它通过铰接结构的移动支架将前后滚筒单元连接起来,多铰链的串联结构保证具有组合自由、移动灵活的特点,可以在飞机货舱内部自由移动,精确的移动轨迹有利于传送装置位置的规划,提高行李传送的效率。研究输送装置的运动轨迹特性,避免输送装置在移动过程中与飞机碰撞,而选成飞机损伤,对飞机货舱行李输送装置的设计至关重要。
近年来,国内外学者对多种拖挂式移动机器人的运动轨迹进行了研究。苑晶等[2]以两种连接形式的拖挂式移动机器人为研究对象,研究了前向和倒车路径的跟踪控制,并对不同拖车连接杆对轨迹的影响进行了分析。黄成等[3]得出了多车体移动机器人在最大转弯情况下所需的最大路径宽度,并提出了基于等效尺寸的多车体移动机器人的路径规划方法。李宏超等[4]提出了包络路径概念,给出了包络路径的量化描述,对多车系统的参数影响进行了描述。刘昱等[5]研究离轴式拖车移动机器人系统的任意路径跟踪问题,建立了虚拟小车的误差状态模型,构造出一种跟踪控制律,使系统跟踪任意的期望路径。Manesis等[6]研究了拖车连接杆带侧滑和不带侧滑的移动机器人系统,并对两种不同系统进行了轨迹仿真对比。Ardentov等[7]研究了带拖车的移动机器人在后退过程中的轨迹,提出了一种基于次黎曼几何的拖车移动机器人停放算法。
上述研究中,文献[2-4]均采用数学几何的方法描述了拖挂式移动机器人的运动暂态轨迹关系,没有描述运动轨迹变化过程;文献[5-7]仅考虑单个拖车的轨迹,没有对多拖车系统进行分析。本文针对飞机货舱结构特点设计了一种飞机货舱行李输送装置,以行李输送装置的多拖车系统为研究对象,针对以上问题,建立运动学模型,并结合多拖车系统的结构参数、运动参数等多种因素影响,对输送装置的运动轨迹特性进行仿真,分析结构参数与运动参数对运动轨迹的影响程度,为飞机货舱行李输送装置的研制提供设计参考。
1 输送装置的运动学建模
飞机货舱行李输送装置的结构如图1所示,它由头部的牵引车和拖挂的电动滚筒组成,滚筒由底部支架承托,前后支架通过铰接的方式连接在一起,类似于蜈蚣形结构,牵引车采用双轮差速的方式驱动整个装置,主体结构采用铝合金设计[8],具有移动灵活、轻便,适用于飞机货舱狭小空间使用的特点。
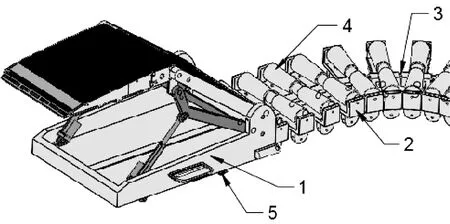
1 头部牵引车 2 电动滚筒支架 3 铰接连接杆 4 电动滚筒 5 驱动轮图1 飞机货舱行李输送装置结构
为建模方便,牵引车与拖挂的电动滚筒单元运行在同一平面上,支架轮胎的侧偏特性在线性范围内变化。为便于对其运动学性能进行研究,可忽略路面不平度、轮胎侧偏、车身侧倾等因素,将该输送装置结构理想化,假设该输送装置系统由牵引车P0以及n-1个拖车(P1,P2,…,Pn-1)组成,共n个移动实体,在运动过程中车轮在平面上作无滑动纯滚动运动,受到非完整约束。该输送装置简化结构如图2所示。

图2 输送装置运动学模型
选择移动实体的滚动轮轴的中点作为参考点,(x,y)表示移动实体在平面中的坐标,移动实体连接杆长度为L(L=L1+L2,L1为前轴,L2为后轴),牵引车驱动轮间距为b,驱动轮半径为r,θi表示移动实体主轴与平面x轴的夹角,每个移动实体通过铰接与上一个移动实体连接,因此有:
(1)
在没有任何参考的情况下,式(1)是由基本运动学推导出来的,可以得到以下判断:移动的刚体只有一个瞬时旋转中心[9](假设移动物体不滑动)。因此该输送装置牵引车的旋转移动过程可以视为做圆周运动,其瞬时旋转半径为:
(2)
式中:v为输送装置牵引车沿运动方向上的瞬时线速度,w为旋转瞬时角速度。
该移动传送装置的牵引车采用后轮差速的方式驱动,其左右轮的旋转角速度分别为ωL、ωR,牵引车的线速度v和转弯角速度w与驱动轮角速度ωL、ωR的关系为[10]:
(3)
2 输送装置转弯轨迹求解
根据图2所示的简化模型,牵引车通过调节后轮的转速可以实现系统的转向控制,而前轮为辅助轮,只起到支撑作用,不提供驱动力,有如下非完整性约束:
(4)
拖车在平面上通过从动轮的滚动实现移动,因此每个拖车有如下非完整性约束:
xi-xi-1=Lcosθiyi-yi-1=Lsinθi
(5)
为计算方便,将输送装置的移动平面设定为复数坐标系[11],在坐标系中拖车的位置可以表述为Pn=Xn+iY,得到拖车Pn-1与Pn之间的关系式:
(6)
根据上式有:
等式两边求导化简为:
(7)

(8)
因此该系统可以用下式表述:
(9)
式中:v为牵引车的线速度,w为牵引车的转弯角速度。
3 轨迹仿真及分析
根据式(9),可得如图3所示系统框图,运用MATLAB对输送装置的运动轨迹进行仿真。
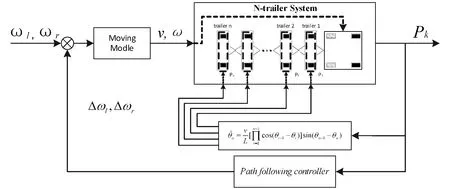
图3 输送装置运动学系统框图
为了研究各拖车的路径轨迹特性,首先需要定义相应的轨迹偏移误差,做出如下定义:
定义1拖车Pn点相对牵引车的运动轨迹在垂直于运动方向的轨迹偏差为相对轨迹偏移。如图4中P2的相对轨迹偏移。
定义2拖车Pn-1点相对拖车Pn点的运动轨迹在垂直于运动方向的轨迹偏差为绝对轨迹偏移。如图4中P3的绝对轨迹偏移。
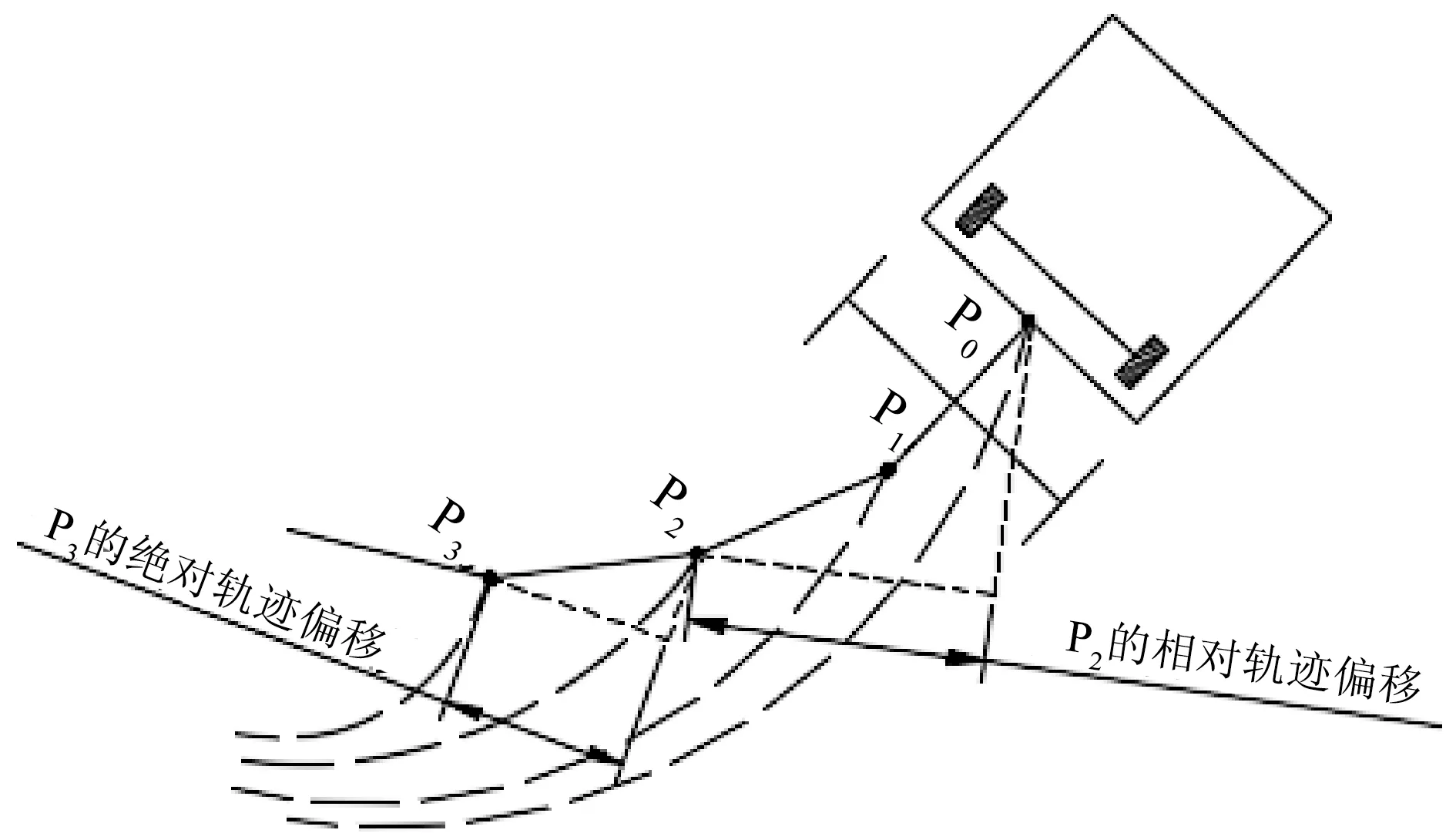
图4 相对轨迹偏差与绝对轨迹偏移示意图
3.1 不同路径下的弯道轨迹仿真结果
在实际应用中,根据运动工况的不同,有4种不同的转弯情况,仿真结果如图5所示,输送装置的原始结构参数见表1。
(a) 90°转弯轨迹
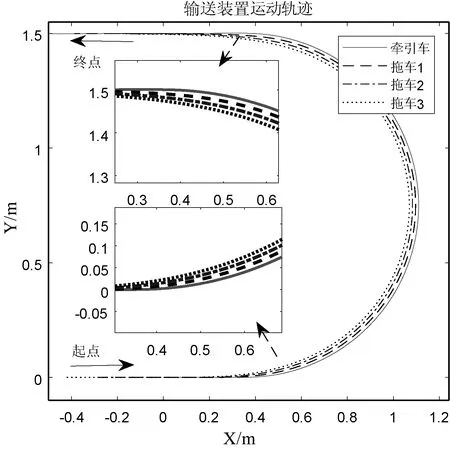
(b) 180°转弯轨迹
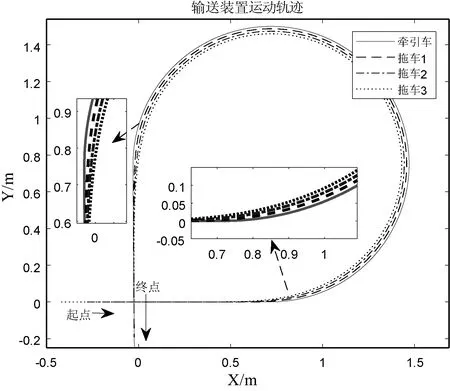
(c) 270°转弯轨迹
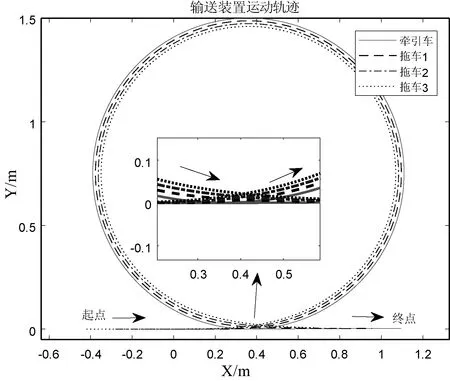
(d) 360°转弯轨迹图5 弯道轨迹仿真图
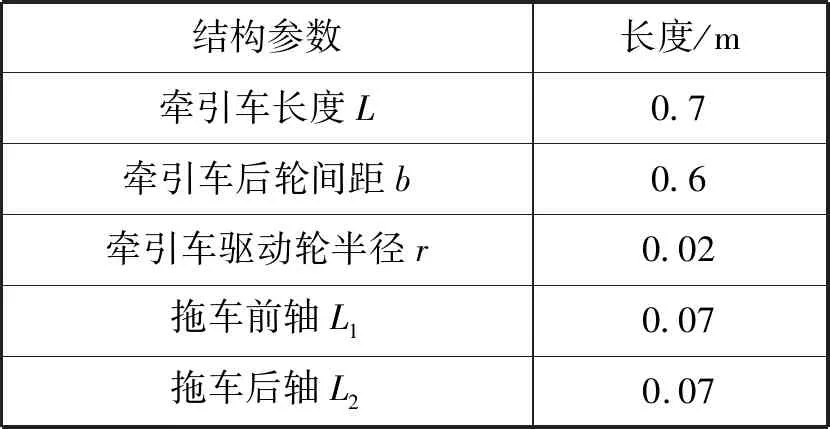
表1 输送装置结构参数
根据4种仿真结果可知,由直线过渡到弯道行驶,拖车P点向圆周内侧偏移,其运动轨迹半径小于牵引车的轨迹半径,在运动过程中,拖车P点的相对轨迹偏移逐渐增大;由弯道过渡到直线行驶,拖车P点轨迹的相对轨迹偏移逐渐减小,向牵引车轨迹逼近,最后与牵引车轨迹重合。
对比4种转弯仿真结果,其进弯道到出弯道的运动轨迹具有对称性。在输送装置结构参数不变、运动参数的情况下,4种运动路径下牵引车以及各拖车做圆周运动的半径分别为R0=0.870 7 m、R1=0.780 4 m、R2=0.773 9 m、R3=0.748 6 m,进弯道的轨迹相同,在转弯过程中各拖车的绝对轨迹偏移大小变化一样,最终在驶入直线路径时轨迹重合。因此,牵引车以及各拖车的轨迹特性不随运动路径改变,其运动轨迹特性具有路径不变性。为研究各拖车的轨迹偏移,以180°的转弯运动为研究对象。
3.2 多节拖车的偏移分析
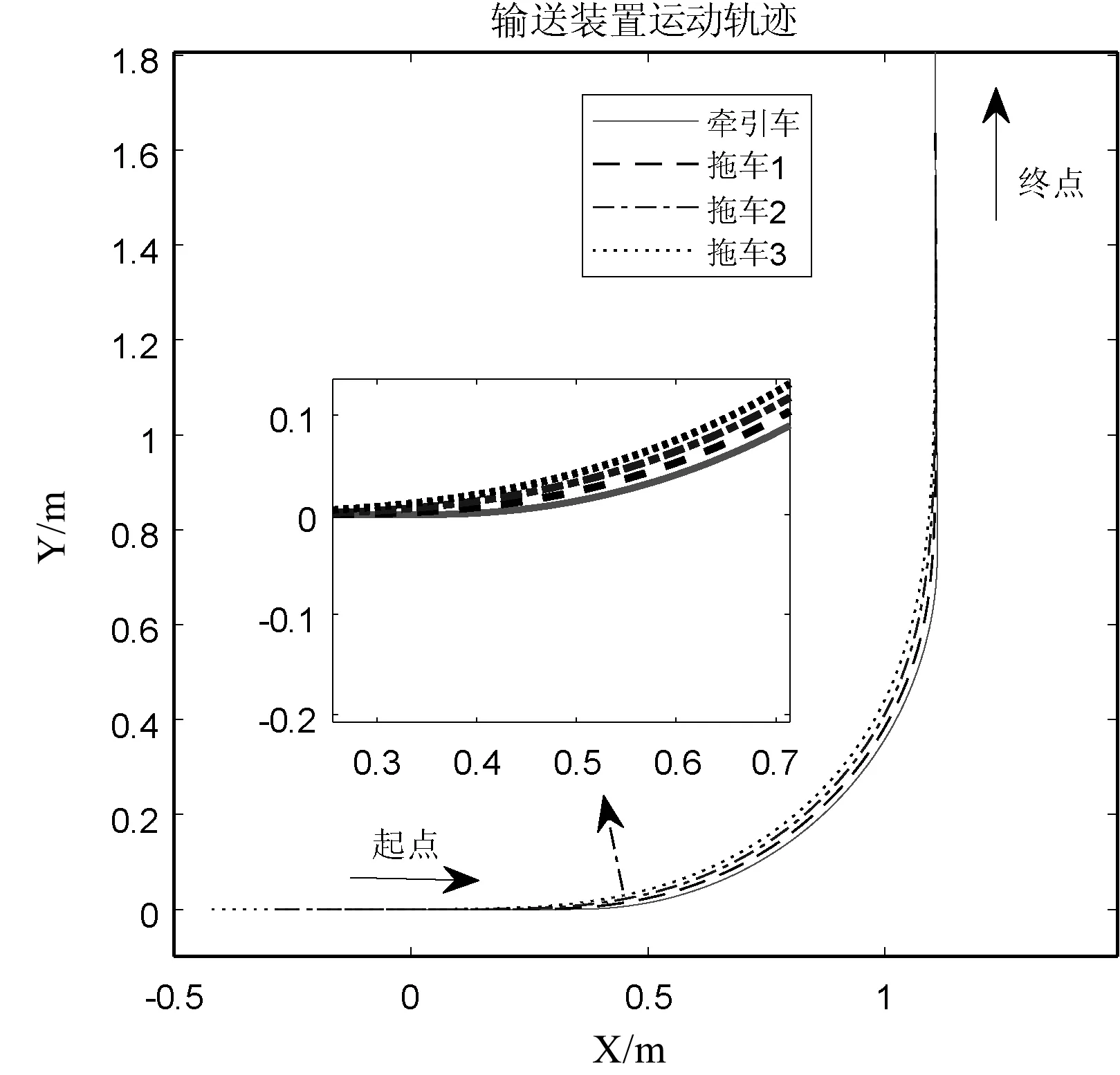
以牵引车拖动的3节拖车为例,做图5(b)所示180°的转弯运动,此时牵引车的运动参数转弯速度v=0.3 m/s、角速度w=0.4 rad/s,各拖车的绝对轨迹偏移如图6所示。此时运动工况为:匀速直线运动—匀速圆周运动—匀速直线运动,在运动过程中,拖车P点的绝对偏移逐渐增加,拖车1的P点绝对轨迹偏移最先趋于饱和,拖车1、拖车2和拖车3的最大绝对轨迹偏移分别为0.026 13、0.026 6、0.027 09 m,并随着拖车数量的增加,各拖车的绝对轨迹偏移逐步增大。因此,在该系统中牵引车的后部拖车存在跟随滞后,具有偏移逐步增加的特点。
3.3 运动参数对偏移距离的分析
不同运动速度的工况下,牵引车的运动线速度v、转弯速率w与最大绝对轨迹偏移距离err不同,以拖车1为研究对象,转弯速率w与运动线速度v对拖车1的最大绝对轨迹偏移的影响如图7所示。
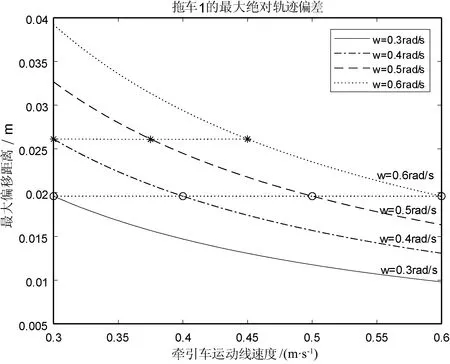
图7 v、w-拖车1的绝对轨迹偏移
由图7可知:在牵引车运动的线速度相同的情况下,随着转弯速率的增大,拖车1的P1点最大绝对轨迹偏移增大;在牵引车转弯速率相同的情况下,随着运动线速度的增大,拖车1的P1点最大绝对轨迹偏移减小。在图7中取某一分析点v=0.4 m/s、w=0.3 rad/s,简写为(0.4,0.3),此时err=0.014 7 m,当角速度增加0.1 rad/s时,最大绝对轨迹偏移增加了0.004 9 m,成等比例增长;当线速度v变化时,最大绝对轨迹偏移呈非线性递减。
根据速度v、角速度w-拖车1的绝对轨迹偏移关系,拖车1的P1绝对轨迹偏移受牵引车速率和转弯速率的影响,转弯半径r与速度成正比、与转弯角速度成反比。对图7进行分析,在图中取三点(0.3,0.4)、(0.375,0.5)、(0.45,0.6), 最大绝对轨迹偏移均为0.026 13 m,此时三点处的牵引车运动转弯半径都为0.75 m;取err=0.019 6 m处的4点时,运动半径均为1 m。可得出结论:牵引车具有相同转弯半径时,其拖车的绝对轨迹偏移相同。
通过仿真可知,其转弯半径与绝对轨迹偏移如图8所示,随着转弯半径的增大,绝对轨迹偏移逐渐减少,绝对轨迹偏移与转弯半径成反比。
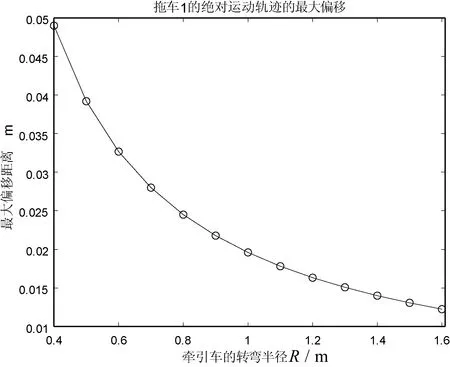
图8 牵引车转弯半径对拖车P1点绝对轨迹偏移的影响
为减小运动参数对偏移距离的影响,并适用于飞机货舱内部的行李搬运,牵引车的转弯半径范围为0.6~1.2 m,此时牵引车线速度为0.3~0.5 m/s,角速度为0.25~0.83 rad/s,此时拖车1的最大绝对轨迹偏移距离为0.032 67~0.016 33 m。
3.4 结构参数对偏移距离的分析
输送装置主要结构参数包括牵引车驱动轮间距b、驱动轮半径r和拖车连接杆长度L。本文仅对拖车连接杆长度L对轨迹偏移的影响进行分析。
绝对轨迹偏移受拖车前后连接轴总长的影响,在保证牵引车结构参数不变的条件下,对连接轴总长给拖车P点的影响进行分析,其结构参数与运动参数分别为:牵引车驱动轮半径r=0.05 m,驱动轮间距b=0.6 m,驱动轮左轮角速度ωL=3.6 rad/s、右轮角速度ωR=8.4 rad/s,此时牵引车的线速度v=0.3 m/s、转弯速率w=0.4 rad/s,转弯半径R=0.75 m。
各拖车P点的绝对轨迹偏移如图9所示,随着拖车连杆长度L变长,各拖车的最大绝对轨迹偏移增大。L为0.13~0.15 m时,对应各拖车P点的绝对轨迹偏移相差较小,故可使拖车连杆长度为0.13~0.15 m。
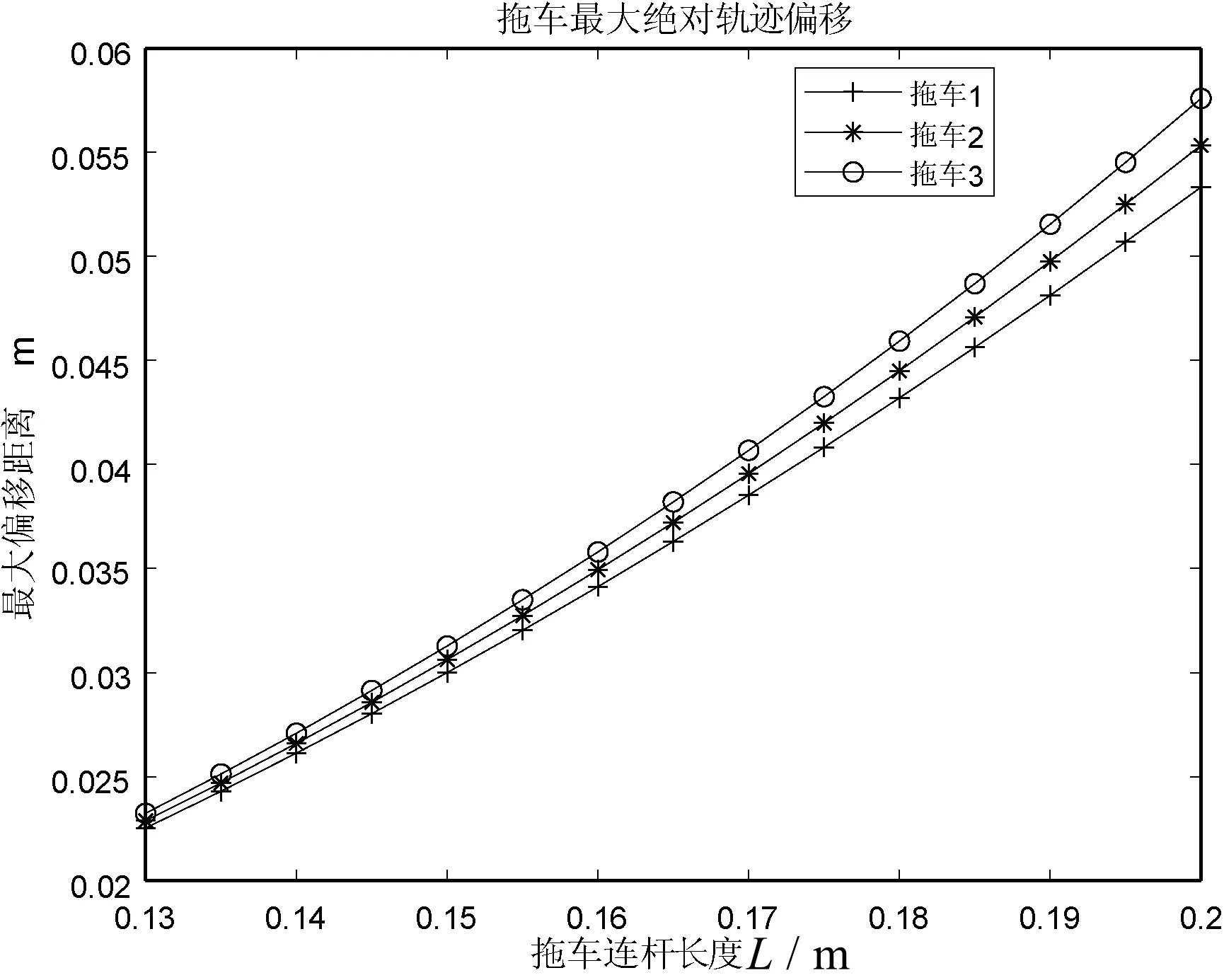
图9 拖车连接轴长对拖车轨迹偏移的影响
4 结 语
针对飞机货舱行李输送装置的特定对象,建立了其运动学模型,采用复数坐标系的方法,运用运动学原理,对90°、180°、270°、360°弯道行驶中各拖车中点轨迹进行了仿真,并对180°转弯过程中各拖车的轨迹进行了分析。结果表明,在多拖车的输送装置系统中,拖车的运动特性不受运动路径影响,拖车运动轨迹具有跟随性,并存在轨迹偏移。其轨迹偏移受到装置外部结构参数的影响以及运动参数的影响:随着连接杆长度的增加,各拖车的绝对轨迹偏移增大,且偏移增长率呈增大的变化趋势;在外部结构参数已定的条件下,轨迹偏移受到牵引车瞬时圆周运动半径的影响,半径越大轨迹偏移越小。设计飞机货舱行李输送装置时,可设计连轴长度为0.14 m,牵引车线速度为0.3~0.5 m/s,角速度为0.25~0.83 rad/s,此时拖车1的最大绝对轨迹偏移距离为0.032 67~0.016 33 m。
猜你喜欢
商用汽车(2022年7期)2022-10-11
北京汽车(2021年2期)2021-05-07
兵器装备工程学报(2020年1期)2020-03-05
船舶标准化工程师(2019年4期)2019-07-24
民用飞机设计与研究(2019年4期)2019-05-21
科技视界(2019年3期)2019-04-20
考试周刊(2018年95期)2018-11-14
专用汽车(2018年10期)2018-11-02
山东工业技术(2018年5期)2018-03-10
科技创新与应用(2016年34期)2016-12-23
