
提高FMCW激光雷达距离分辨率的研究
2019-09-12 07:29单昕
山西大同大学学报(自然科学版) 2019年4期
单 昕
(宿州学院信息工程学院,安徽 宿州 234000)
FMCW激光雷达其结合了激光与调频连续波雷达二者各自的优点,能够准确提供被测目标的距离、速度和方位信息。因此FMCW激光雷达具有广泛的应用前景。目前被世界各国广泛应用于精密测量、太空遥感、环境监控等应用领域,如2001年德国Siemens的Richard Schneider等人采用校准干涉信号对激光器的调频非线性误差进行了补偿,获得了0.5 mm的距离测量精度[1]。2005年Steven M.Beck等完成了FMCW合成孔径雷达技术研究[2]。2011年中科院上海技术物理研究所的于啸等对FMCW雷达技术的测距测速分辨率和误差等进行了测试和分析,实验结果表明该系统可达到mm/s级的测速精度和cm级的测距精度,探测灵敏度优于0.1nW[3]。由于国内研究相对起步较晚,技术相对不成熟,因此研究测量技术具有高精度的FMCW激光雷达的任务越来越迫切。
1 测距原理分析
传统的FMCW激光雷达的调制是,首先通过单一的调幅或调相对RF信号进行调制,然后再用已调的RF信号对激光进行强度调制。FMCW激光雷达通过测量激光往返于探测器与目标间的时间来实现对目标的探测。在FMCW激光雷达中,距离的分辨率是指能够对相隔一定距离的目标进行分辨的能力。距离与混频后得到的中频频率之间的关系为:

其中R为目标的距离,T为扫频周期,C为光速,B为调频信号带宽,fIF为中频信号频率。利用快速傅里叶变换上式得:

由上式可知FMCW激光雷达的距离分辨率只与调频信号带宽B有关,而与其他因素无关。调频信号带宽B越大,距离的分辨力越高。针对上述分析结果,使用IQ调制技术来提高FMCW激光雷达的距离分辨率。
2 基于IQ调制器的激光雷达
2.1 IQ调制器的原理分析
如果在FMCW激光雷达中使用IQ调制技术,利用IQ调制器的同相(I)和正交(Q)分量相互正交、互不相干的特性,则需要把相互正交的两路信号调制到光载波上,因而必须选择一款合适的IQ调制器。IQ调制器是由两个并行的工作在推挽方式的马赫-曾德尔调制器(MZM),一个移相器,一个3dB分束结构和一个3dB耦合结构组成。如图1所示。

图1 使用IQ调制器的FMCW激光雷达的系统图
线性调频信号又叫Chirp(啁啾)信号[4],是一种频率随时间变化而呈线性变化的正弦波信号。因为最高调制频率的限制,所以导致了Chirp信号相对带宽较宽。在雷达系统中,信号的带宽决定了雷达的距离分辨率,因此激光成像雷达主要利用线性调频信号进行测距。
在一个扫频周期T内的典型的线性啁啾信号的表达式为:
其中A为信号的幅值,f0表示t=0时的频率即有效信号区间的中心频率,T为信号的一个周期为信号频率的变化率,B为信号的有效带宽。
我们输入到IQ调制器的IQ两臂的驱动电压信号为I和Q的驱动电压相互正交[5],且I和Q的驱动电压又分别包含两个相互正交的:
其中VD为驱动电压信号的幅值。其信号示意图如图2所示。
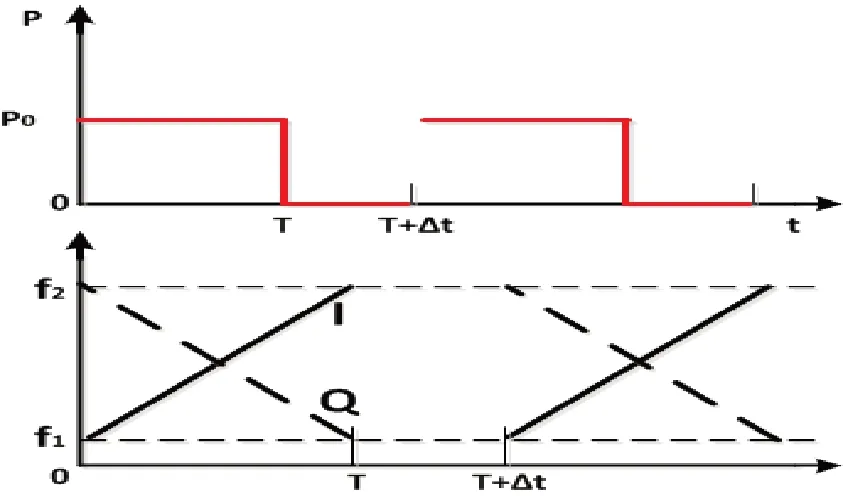
图2 I,Q两臂的驱动电压信号
在FMCW激光雷达系统测距时,光信号可表示为:

其中fcarrier为光载波的频率,As为光载波的幅值。当时,可对上式做线性化处理得:

这是一个抑制光载波的双边带信号,两个边带分别调制了两个相互独立的载波信号。本振信号的表达式为:

其中ALO为本振信号的幅值。
光信号发射端到目标处距离为R,回返时间为在目标处反射时延迟时间为Δt,则回波信号为
其中At为本振信号的幅值与本振信号在90°光混频器中混频输出两路信号[6]:

然后将其输入光平衡检测器进行光电变换输出光信号为:
其中Ψ为光平衡检测器的响应度。
则最终得到的IQ复合信号为:
2.2 仿真研究
在仿真中利用Matlab软件,将式13做FFT处理并作图得到其频域特征。其中设定在一个脉冲周期T=1μs内,延迟Δt=0.8μs,啁啾信号的调频斜率B=3GHz,一个信道内的两个正交信号的初始频率分别为f0=1.5GHz和f1=5GHz。得到其频谱图如图3~5所示。

图3 I路信号幅频特性图

图4 Q路信号幅频特性图
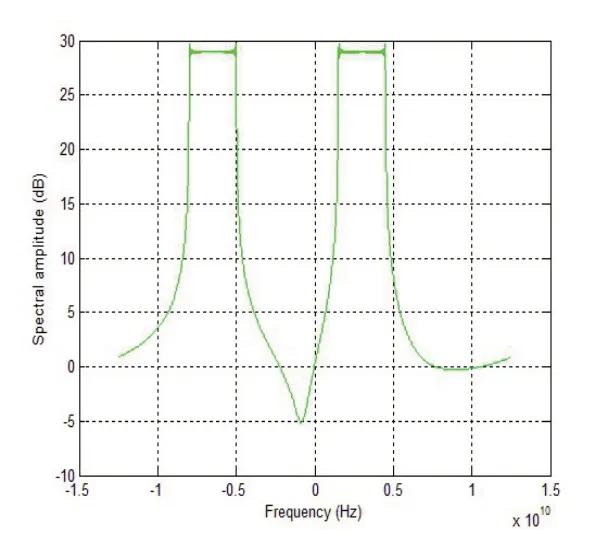
图5 IQ复合信号幅频特性图
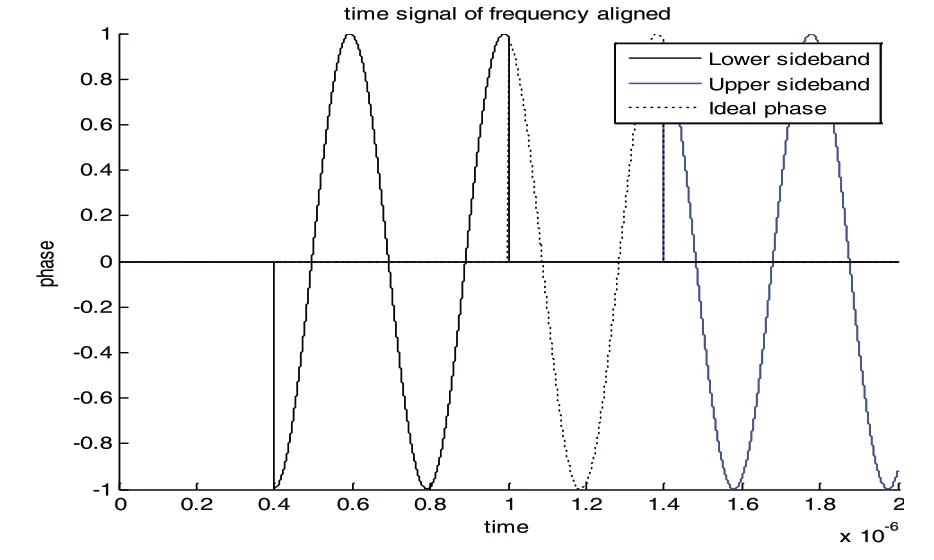
图6 上下边带的相位关系图
对IQ复合信号进行合理相位匹配利用数字信号处理技术对雷达信号进行后期处理和脉冲压缩处理[8],如图7所示。

图7 信号后期处理和脉冲压缩处理
从图7可知,IQ复合信号相对于I,Q信号获得了更窄的脉冲,两者相差一倍的带宽,这样由距离分辨率公式可知在不增加RF信号带宽的情况下,可将FMCW激光雷达的距离分辨率提高一倍。
2.3 实验研究

图8 搭建的实验系统
按图1搭建的实验系统如图8所示,实验系统的telescope安装在一个可以前后自由滑行的轨道上面,光源是带有尾纤的100 kHz 频宽的可调谐连续波激光器(Emcore TTX1994)其中心波长是1549.65 nm,任意波形发生器是Tektronix 70000 A,实时示波器是LeCory 8600 A。采集的数据将使用MATLAB 编程处理以完成复杂频谱再建、数字均衡、下变频等。
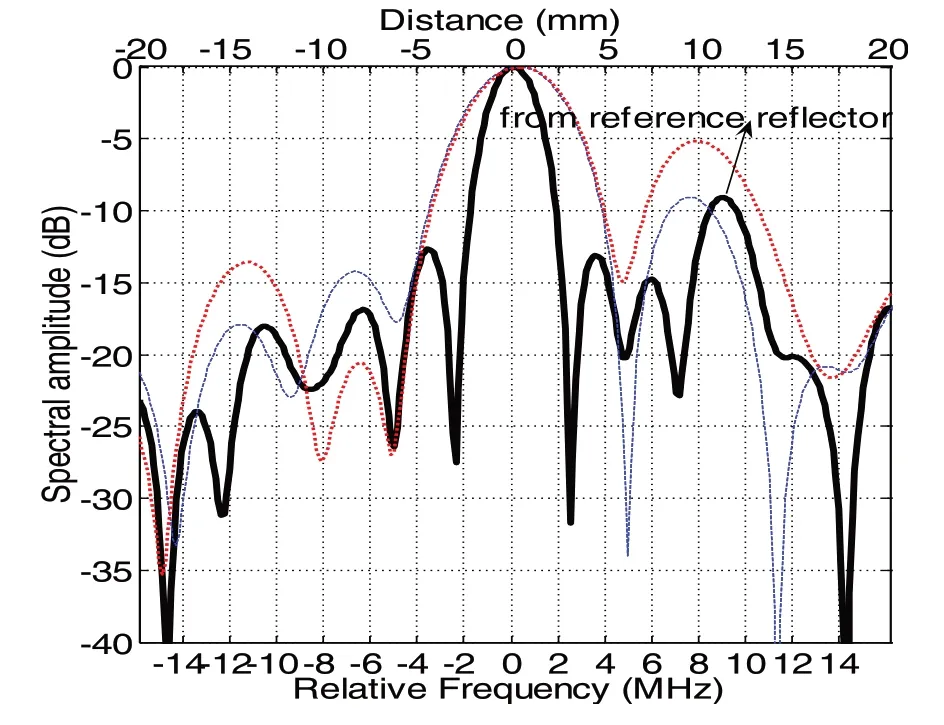
图9 经过后处理的FMCW的频谱对比图
实验系统的测试结果经后处理的频谱如图9所示。如图所示,实线表示相位匹配的FMCW系统经后处理的频谱图,红色的点线和蓝色的虚线表示FMCW 系统经后处理的频谱。红色和蓝线表示的中心峰3 dB带宽大约是1.52 MHz,其相应的距离分辨率是4.4 cm。实线表示的中心峰3 dB带宽大约是0.8 MHz,其相应的距离分辨率是2.3 cm。实验结果表明该FMCW激光雷达比具有相同调制能力的FMCW激光雷达的距离分辨率提高了一倍。
3 总结与展望
本文基于FMCW激光雷达的系统特点,阐述了IQ 调制的基本原理。并且在FMCW 激光雷达系统的基础上,研究了雷达系统中的IQ 调制,使用IQ调制器把数据分为两路,分别进行载波调制,两路载波相互正交,再通过基于90°光学混频器分别进行探测的新型FMCW 激光雷达。对该FMCW 激光雷达各项系统参数和关键技术进行了理论仿真和数值模拟,搭建了实验系统并进行了实验研究。通过仿真和实验证明了同时利用IQ 调制器的同相(I)和正交(Q)两个信道,并通过后处理使线性啁啾信号的I、Q分量的相位保持连续的方式,可以成倍地提高FMCW 激光雷达的距离分辨率。相较与普通的激光雷达,提高距离分辨率的激光雷达在环境监测领域拥有更广阔的前景。
在以后的工作中,将继续研究多普勒效应对基于IQ 调制器的FMCW 激光雷达上下边带信号相位的影响,并提出相应的后处理算法,使基于IQ调制器的FMCW 激光雷达能够测量动态目标。另外在以后的研究工作中,将在发射端添加单频信号,从而使基于IQ 调制器的FMCW 激光雷达在提高距离分辨率的同时,也能够测量物体目标的移动速度。
猜你喜欢
能源工程(2021年5期)2021-11-20
导航定位学报(2021年3期)2021-06-19
今日农业(2020年20期)2020-12-15
合肥工业大学学报(自然科学版)(2020年7期)2020-08-05
电子制作(2019年15期)2019-08-27
科技传播(2019年24期)2019-06-15
能源(2018年10期)2018-12-08
中国交通信息化(2018年1期)2018-06-06
能源(2016年10期)2016-02-28
空间控制技术与应用(2015年4期)2015-06-05
