基于SAINS/SAKalman滤波算法
2019-09-11 08:20:10赵耀熊智田世伟刘建业崔雨晨
航空学报 2019年8期
赵耀,熊智,*,田世伟,2,刘建业,崔雨晨
1.南京航空航天大学 自动化学院,南京 211106 2.陆军工程大学 通信工程学院,南京 210007
微小型飞行器是一种集微机电(Micro Electro Mechanical Systems,MEMS)技术、微电子技术、自主导航与智能控制技术等于一体的新型无人飞行器,具有成本低、体积小、重量轻、灵活性强、自主飞行等特点,能够在低空和室内等复杂、危险的飞行环境下执行特定的任务[1-3]。在借助惯性导航系统(Inertial Navigation System,INS)/合成孔径雷达(Synthetic Aperture Radar,SAR)组合导航系统执行无人机实时定位与结构健康监测任务时,可利用机载微小型SAR实时获取所处环境的景物图像,通过图像匹配技术,将SAR实测图像与机载计算机中存储的数字地图进行空间上的对准,从而获得准确的位置信息,辅助INS进行飞行器位置信息的修正与确定[4-6]。在上述过程中,抑制斑点噪声对SAR图像的干扰,保证匹配结果的准确性十分关键[7-8]。因此,本文从图像匹配误差分析的角度出发,将开展SAR图像匹配结果可信度分析,并以此为基础,进一步开展INS/SAR自适应Kalman滤波算法的研究。
由于实时获取的SAR图像和数字地图是通过不同的传感器在不同的时间获得的,其图像灰度差别很大、甚至相反,所以基于灰度的匹配算法无法用于SAR图像匹配,必须采用基于特征的图像匹配算法才能获得较为理想的匹配效果[9-11]。在基于特征的图像匹配算法方面,国内外的相关学者已经开展了大量的研究工作,提出的基于Hausdorff距离的边缘特征图像匹配算法、基于局部不变特征的尺度不变特征变换(Scale-Invariant Feature Transform,SIFT)匹配算法及在其基础上改进的优化算法得到了广泛的应用[12-15]。其中,作者团队[16]提出的加权Hausdorff距离匹配算法能够有效地克服斑点噪声对图像匹配精度的干扰,获得较理想的匹配结果,但并未对匹配结果的可信度做进一步的分析。在匹配结果可信度分析方面,曲圣杰等[17]提出了一种基于证据推理的景象匹配末端置信度评估方法,能够有效给出匹配置信度并在发生误匹配时及时报警。陈建祥和桑农[18]研究了基于神经网络的图像匹配可信度判别方法,并通过匹配实验证明了方法的有效性。与上述文献不同的是,本文旨在通过对图像匹配结果可信度的分析,筛选出可信的匹配结果应用于INS/SAR组合导航系统中,减小不可信的匹配结果对组合系统的导航精度造成的不良影响。在组合导航自适应滤波算法方面,经典的Sage-Husa自适应滤波及其改进算法在系统量测噪声时变的情况下能够取得良好的滤波估计效果[19-21]。文中将针对SAR输出非等间隔特性和匹配结果不可信的情况,在Sage-Husa自适应滤波的基础上进行相应的改进,以获得更佳的滤波精度。
因此,为了进一步减小图像匹配误差对INS/SAR系统的影响,获得更加可靠的匹配结果,本文在加权Hausdorff距离图像匹配算法的基础上,从匹配误差特性分析的角度着手,提出了一种基于模糊推理的匹配结果可信度评价准则,筛选出有效的匹配信息用于INS/SAR组合导航系统,提升匹配结果利用率。同时,通过改进Sage-Husa自适应Kalman滤波算法,设计了非等间隔自适应Kalman滤波算法,在合理的匹配误差范围内,自适应地调整量测噪声方差阵,提升INS/SAR系统水平方向的定位精度。
1 SAR图像匹配结果可信度评价准则
本文采用加权Hausdorff距离算法作为SAR图像匹配算法,在上文中已经提到,该算法能够获得理想的匹配结果,然而通过大量的数据采集实验发现,由于SAR图像易受斑点噪声的影响,在不同程度斑点噪声存在的情况下,该算法无法保证每次的匹配结果都准确无误。因此,本文设计了一种SAR图像匹配结果可信度评价准则。
1.1 加权Hausdorff距离图像匹配算法
设给定的参考图为图像S,实测图为图像R,整个SAR图像匹配算法的具体流程如下:
1)分别提取图像S和图像R的边缘特征,并将其二值化。
2)对图像S和图像R的边缘特征二值图进行去噪处理。
3)细化去噪后的图像S和图像R。
4)提取细化后的图像S和图像R的分支特征点,记作FS和FR。
5)采用3-4DT(3-4 Distance Transformation)算法对细化后的图像S和图像R的特征点集进行二维空间中的距离变换计算,得到距离变换矩阵M。
6)利用第5)步得到的矩阵M和第4)步得到的FS、FR,进行加权Hausdorff距离计算。
7)寻找具有最小加权Hausdorff距离值的匹配点作为最佳匹配点,得到目标像素值。
上述流程中涉及的具体计算公式参见文献[16]。
1.2 匹配结果可信度分析
本文中认为匹配结果在x和y方向上的误差均在2像素以内的匹配结果是可信的。匹配结果可信与否与算法得到的最佳匹配点对应的最小加权Hausdorff距离值(记作H_opt)关系十分密切,H_opt反映了该图像与匹配区域的相似程度。图像中提取到特征点数量的多少,与周围图像的差异程度、图像受斑点噪声影响的程度等都是影响H_opt结果的因素。在对大量的图像匹配结果进行分析后发现,当H_opt小于或等于某一阈值(阈值A)时,匹配结果全部可信;当H_opt大于某一阈值(阈值B)时,匹配误差过大,结果不可信,在算法中判定为没有找到合适的匹配点;当H_opt介于阈值A和B之间时,部分匹配结果可信,部分匹配结果与参考值相差甚远,故此时匹配结果不完全可信,在文献[16]提出的加权Hausdorff距离算法中并没有对此进行判断,而本文恰是通过提出的基于模糊推理的SAR图像匹配结果可信度评价准则弥补了加权Hausdorff距离算法在实际用于INS/SAR组合导航中的这一不足之处。
1.3 基于模糊推理的可信度评价准则
在SAR图像匹配的过程中,图像受斑点噪声影响的程度、算法在一次匹配中提取到的特征点数、H_opt的值以及图像本身是否具有足够多的特征等因素都会影响匹配结果及可信度。目前没有用来描述它们之间定量关系的确切数学表达,但是可以分析出它们之间的定性关系。本文通过设置模糊规则,建立模糊推理系统,采用模糊推理的方法实现这种定性关系的定量表达[22-23],并提出一种匹配结果可信度的评价准则。
文中引入了等效视数来表征SAR图像受斑点噪声影响的程度,等效视数度量了图像区分具有不同后向散射特性区域的能力,是衡量一幅SAR图像斑点噪声相对强度的一种指标,等效视数越大,表明图像上的斑点越弱[24]。定义为
(1)
式中:ENL为等效视数;μI为图像像素均值;σI为图像像素标准差。
分别构建了描述等效视数、提取到的特征点数以及H_opt与匹配结果可信度之间关系的模糊规则,具体如下:
1)等效视数与可信度之间的关系
① 等效视数大,匹配结果可信度大;② 等效视数适中,匹配结果可信度适中;③ 等效视数小,匹配结果可信度小。
2)提取到的特征点数与可信度之间的关系
① 提取到的特征点数多,匹配结果可信度大;② 提取到的特征点数适中,匹配结果可信度适中;③ 提取到的特征点数少,匹配结果可信度小。
3)H_opt与可信度之间的关系
① H_opt小,匹配结果可信度大;② H_opt适中,匹配结果可信度适中;③ H_opt大,匹配结果可信度小。
通过以上3组模糊规则,建立3个独立的模糊推理系统,分别为模糊系统1)~3),对3个系统推理出的可信度进行加权平均,选定加权可信度结果大于某一阈值(阈值C)的匹配结果是可信的。加权可信度的计算公式为
(2)
根据这种“可信度评价-筛选”机制,可在H_opt介于阈值A和B之间时,选出有效的匹配结果。基于模糊推理的SAR图像匹配结果可信度评价与筛选流程图如图1所示。筛选后的匹配结果作为有效匹配结果与INS进行组合,完成对飞行器位置信息的准确估计。
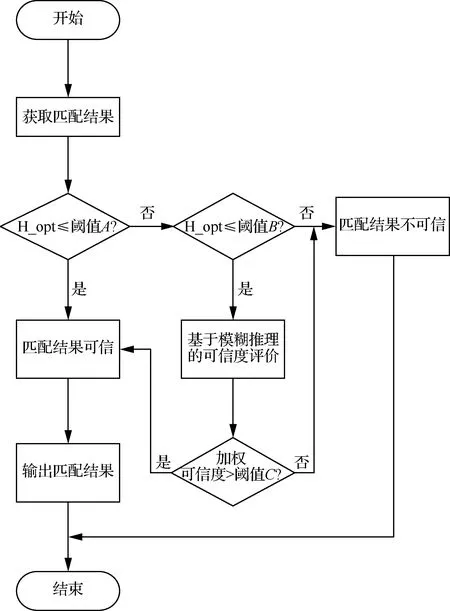
图1 SAR图像匹配结果可信度评价与筛选流程图Fig.1 Evaluation and selection flow chart of SAR image matching results credibility
2 INS/SAR自适应Kalman滤波算法
在得到SAR图像匹配结果之后,将INS解算的位置信息与SAR图像匹配得到的位置信息的差值作为量测值送入Kalman滤波器中,经Kalman滤波修正,实现对飞行器位置的估计。在滤波过程中,由于匹配误差的存在,量测噪声统计特性会发生变化,结合SAR输出的非等间隔特性,设计了非等间隔自适应Kalman滤波算法。
2.1 INS/SAR系统状态方程
在INS/SAR系统中,根据INS误差方程,选取惯导误差作为状态量建立系统的状态方程如下:

(3)
状态变量表示为

2.2 INS/SAR系统量测方程
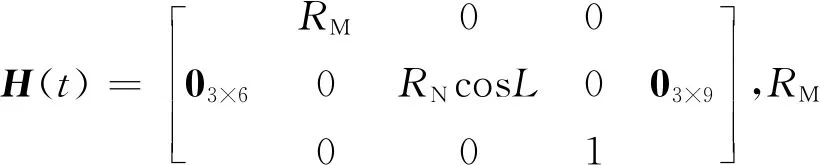
通过图像匹配可以获得水平位置信息,无法获取高度信息,因此,在INS/SAR组合系统中将气压高度计的输出增列为量测信息。选取INS解算出的纬度、经度和高度信息与SAR图像匹配提供的纬度、经度和气压高度计提供的高度信息的差值作为量测值,量测方程为
Z(t)=H(t)X(t)+V(t)
(4)
2.3 基于可信度评价的自适应Kalman滤波算法
在建立了组合导航系统的数学模型之后,采用Kalman滤波算法进行状态估计,考虑到SAR量测信息的非等间隔特性以及匹配误差的影响,设计了非等间隔自适应Kalman滤波算法如下。
设Kalman滤波周期为T,SAR量测输出周期为NT(N为正整数),在第k个SAR量测周期内,tk(i)表示tk(0)+iT时刻(初始时刻t0(0)的状态和协方差X0(0)、P0(0)已知,tk(N)=tk+1(0),i=0,1,2,…,N),在tk(N)时刻输出SAR量测信息。
在tk(i)(i=1,2,…,N-1)时刻,没有SAR量测信息,在离散化后,只进行自适应Kalman滤波时间更新;在tk(N)时刻,对匹配结果进行可信度评价,若匹配结果不可信,仍只进行时间更新,此过程与传统Kalman滤波类似,具体为
Xk(i)=Φk(i),k(i-1)Xk(i-1)
(5)
(6)
在tk(N)时刻,如果图像匹配结果可信,则同时进行时间更新和量测更新,同时对量测噪声方差阵进行自适应调整,在此过程中采用了改进的Sage-Husa自适应滤波算法,具体为
Xk(N)|k(N-1)=Φk(N),k(N-1)Xk(N-1)
(7)
(8)
vk(N)=Zk(N)-Hk(N)Xk(N)|k(N-1)
(9)
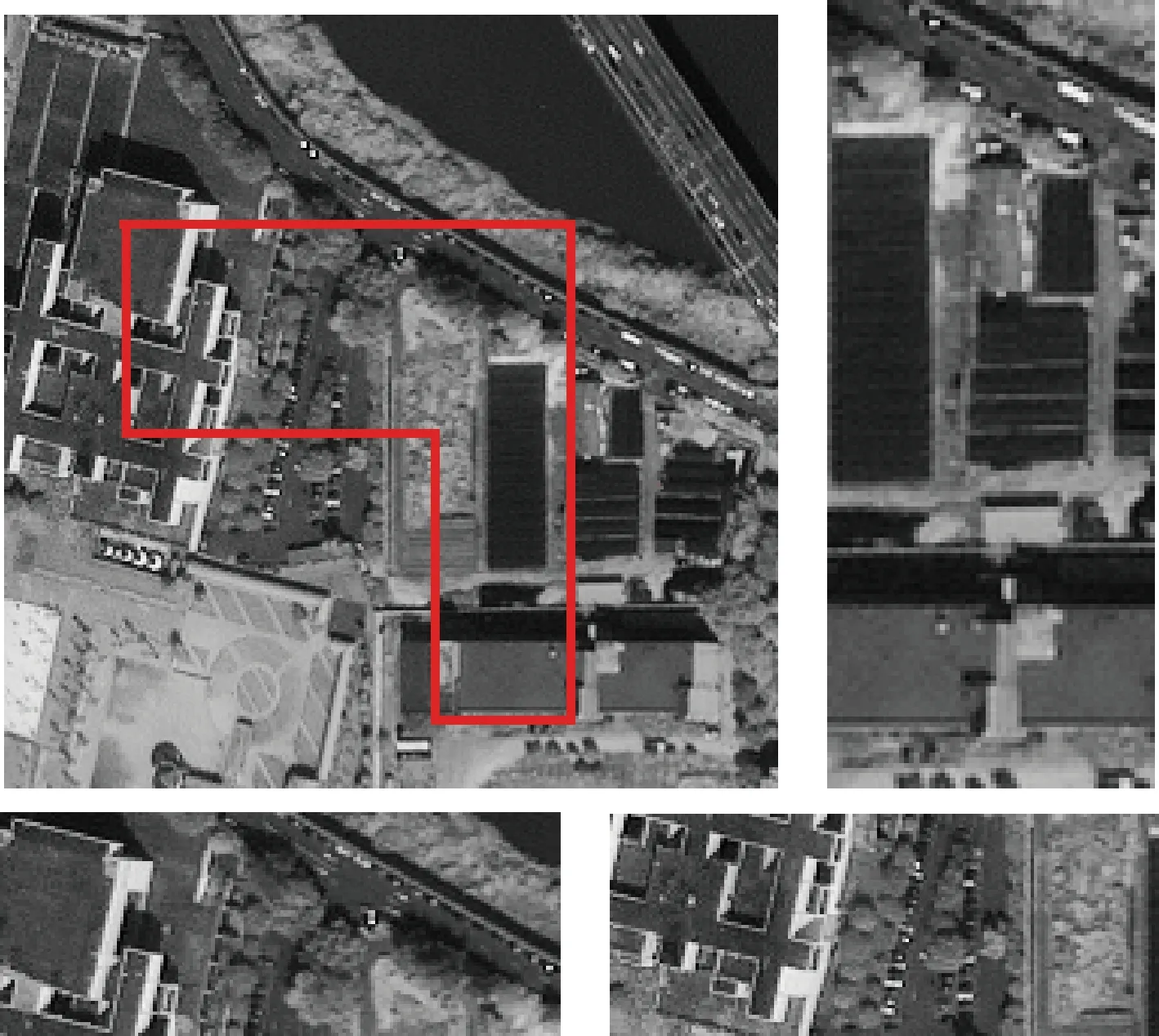
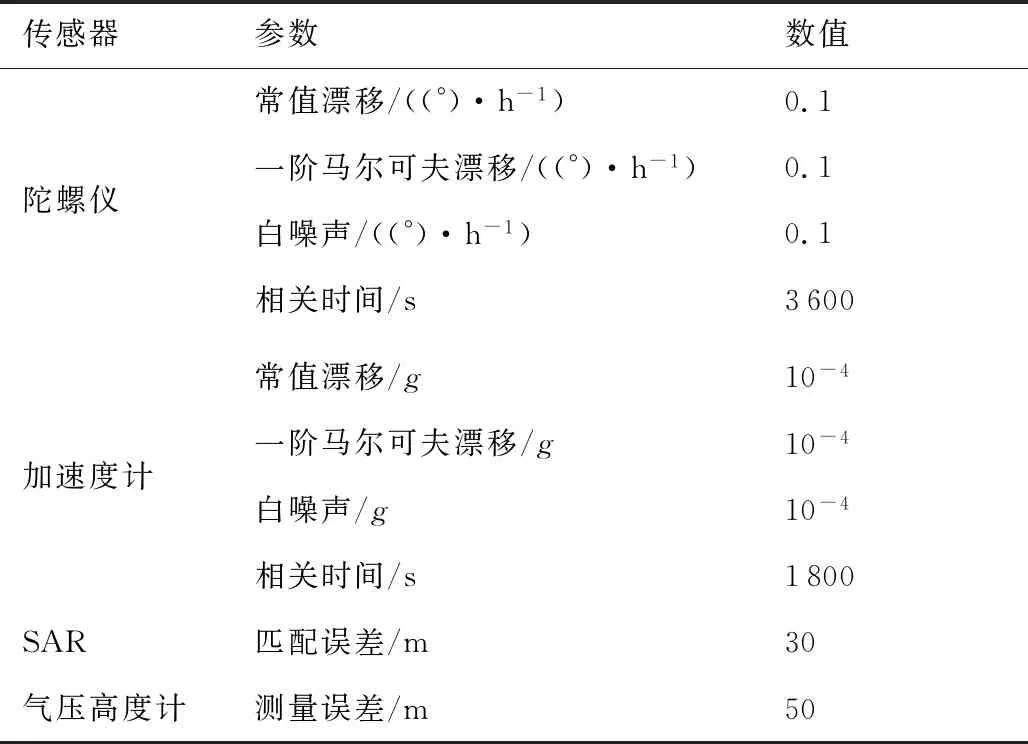
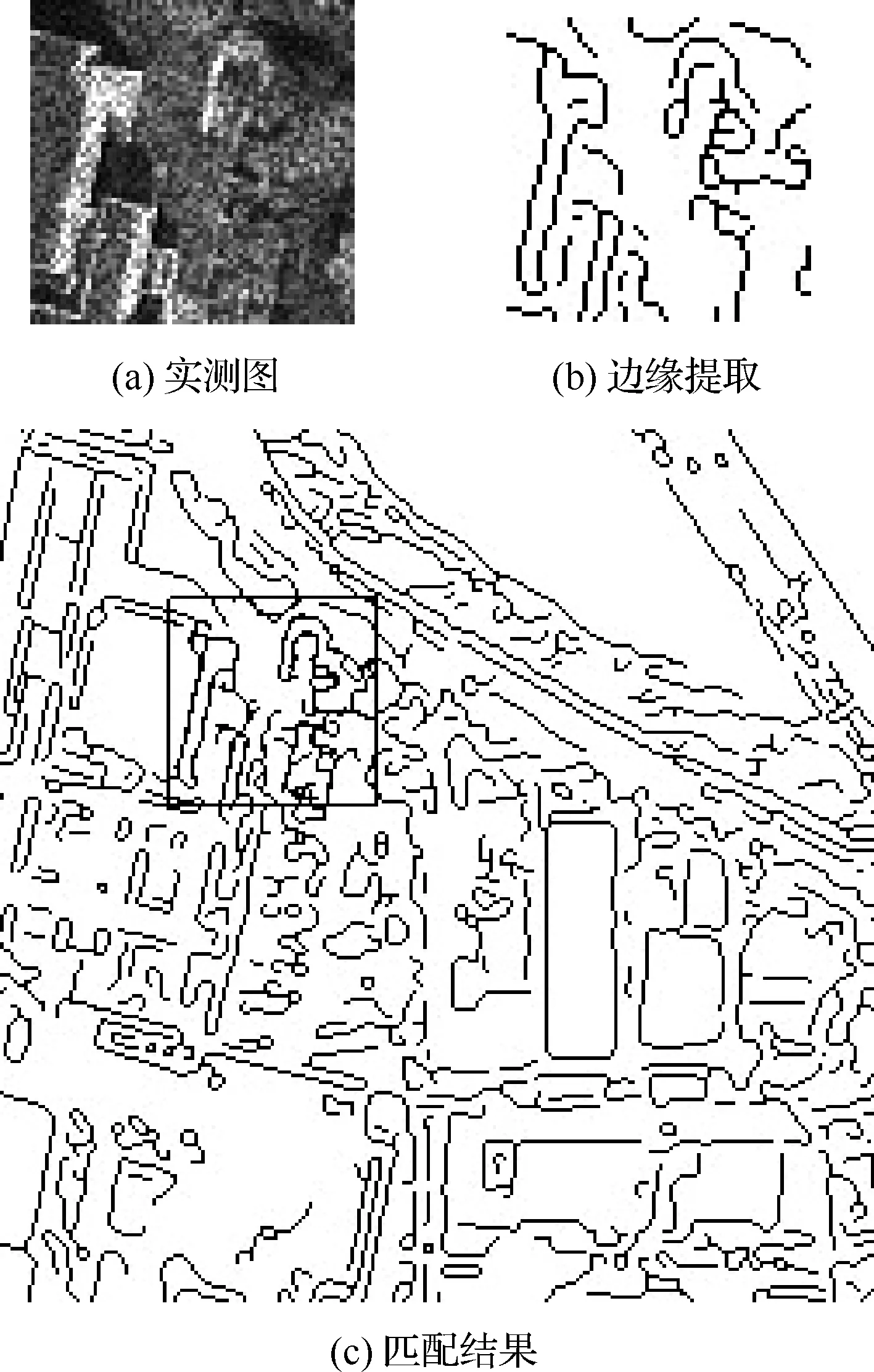
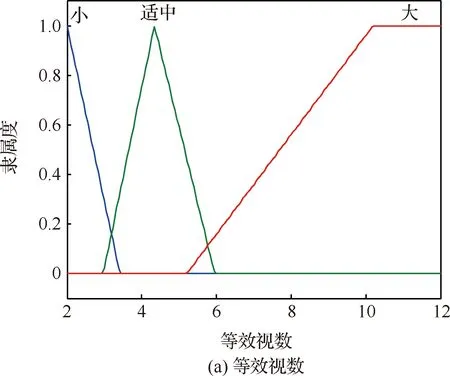
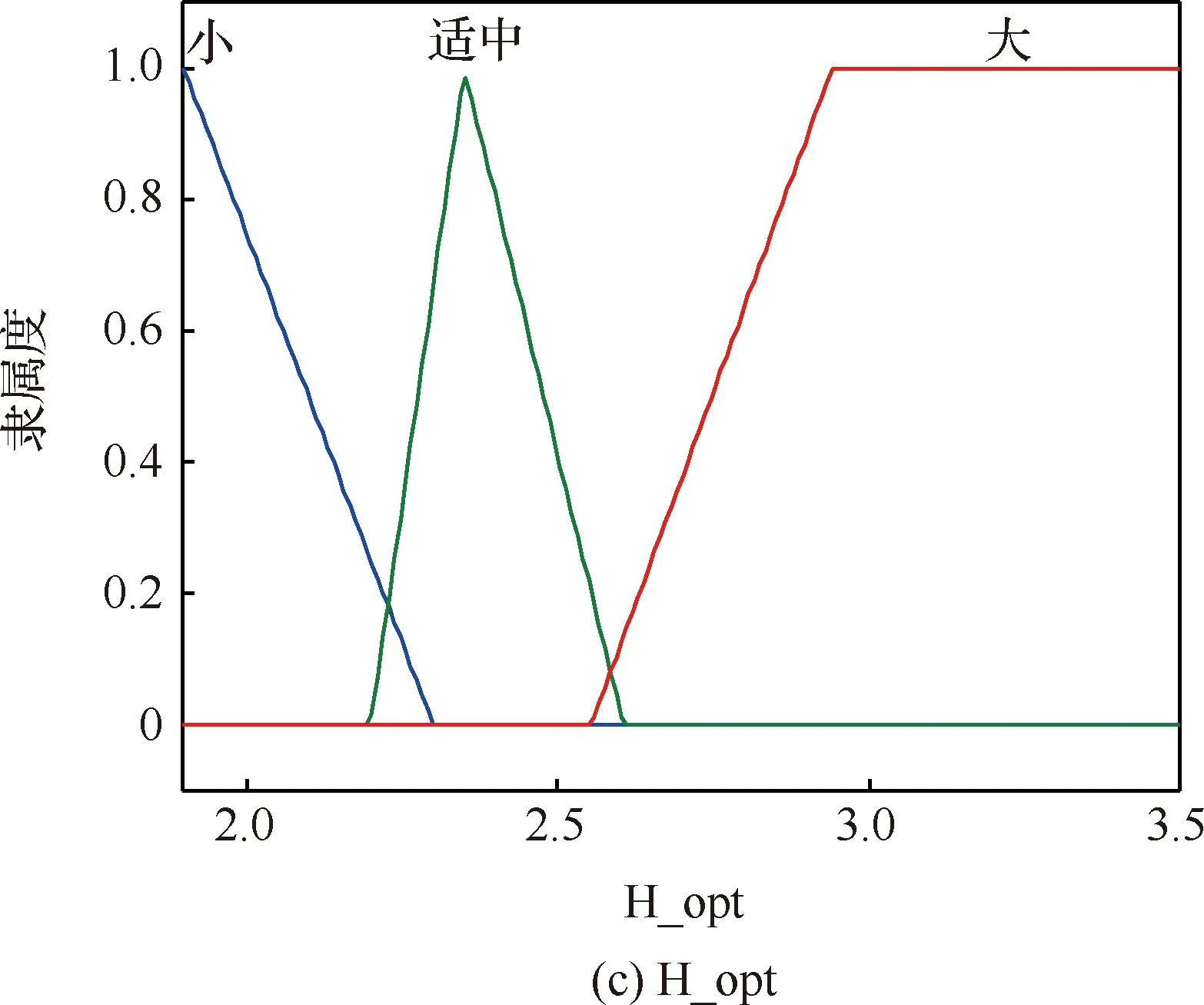
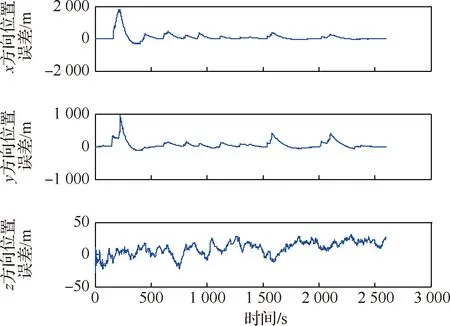
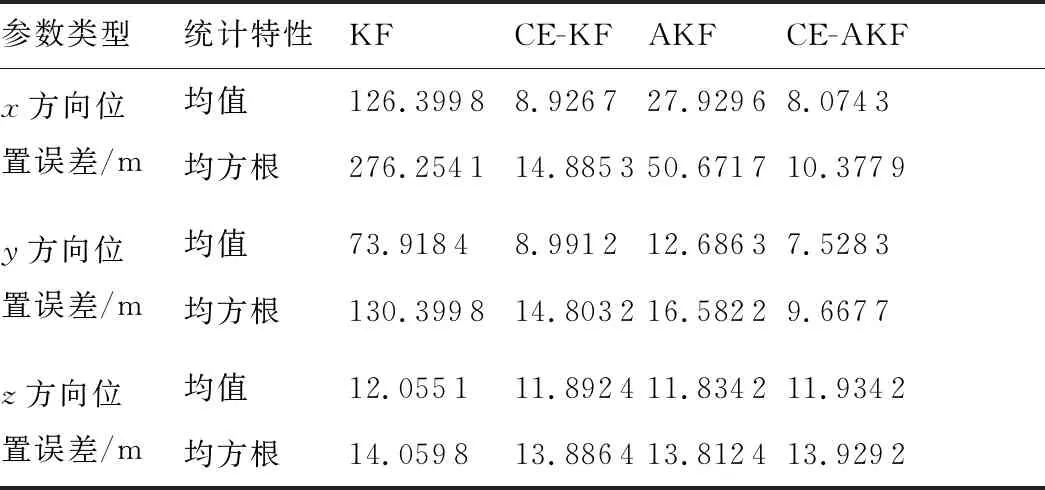
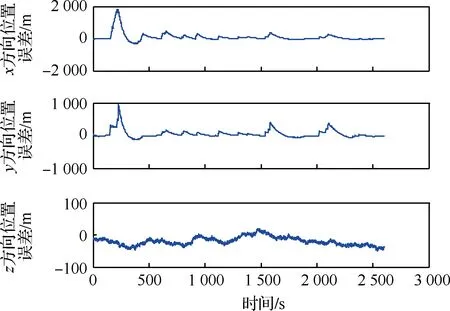
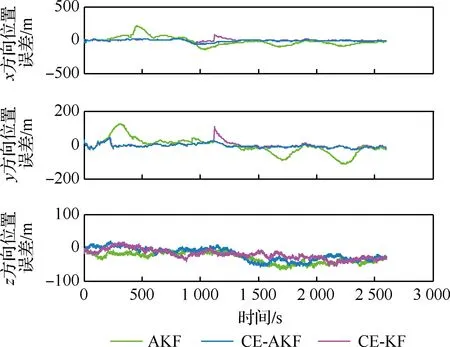
dk=(1-b)/(1-bk+1)0 (10) Rk(N)=(1-dk)Rk(N-1)+ (11) Rk(N)z=Rk(N-1)z (12) (13) Pk(N)=(I18-Kk(N)Hk(N))Pk(N)|k(N-1) (14) Xk(N)=Xk(N)|k(N-1)+ Kk(N)(Zk(N)-Hk(N)Xk(N)|k(N-1)) (15) 由于SAR图像匹配结果影响的是水平方向的定位精度,故本算法在利用式(11)对量测噪声方差阵进行自适应调整时,保持高度方向的量测噪声方差Rk(N)z不变。 基于SAR图像匹配结果可信度评价的INS/SAR自适应滤波算法流程图如图2所示。 图2 INS/SAR自适应Kalman滤波算法流程图Fig.2 Flowchart of INS/SAR adaptive Kalman filtering algorithm 为了验证本文所提算法的有效性,在CPU为Inter Core i7-8700K,主频为3.7 GHz的计算机上利用MATLAB进行了SAR图像匹配仿真实验,并将匹配结果应用于INS/SAR组合导航系统中。 在SAR图像匹配仿真中,取阈值A=2,阈值B=2.5,考虑到等效视数和特征点数对匹配结果可信度的影响也会部分体现在H_opt中,故本设计中将H_opt作为主要的影响因素,取模糊系统1)~3)对应的权值分别为w1=0.1,w2=0.2,w3=0.7,选定阈值C=50%。 在INS/SAR自适应Kalman滤波算法仿真中,模拟微小型无人飞行器在建筑物密集的环境中执行结构健康监测任务,匀速飞行,飞行高度为500 m,机头速度为10 m/s,飞行轨迹为图3中的红线标注部分。INS解算周期为0.02 s,滤波周期为1 s,SAR输出具有非等间隔特性,N为1~5之间的随机整数,仿真时间为2 600 s,选取“东-北-天”地理坐标系为导航坐标系,传感器参数设置见表1。在特征较为丰富的区域,改变上述参数的设置,选定不同的飞行轨迹,算法结果仍然比较稳定,由于篇幅限制,文中列举了其中一种参数设置。 图3 参考图和匹配区域图Fig.3 Reference image and matching area images 表1 传感器参数设置Table 1 Setting of sensor parameters 陀螺仪常值漂移、一阶马尔可夫漂移和白噪声设为0.1 (°)/h,加速度计常值漂移、一阶马尔可夫漂移和白噪声设为10-4g。SAR匹配误差为30 m,气压高度计的测量误差为50 m,均设为白噪声。文中提到的所有白噪声的值,均为均方根误差。 为了验证加权Hausdorrf距离算法在不同程度斑点噪声干扰下SAR图像匹配的可信度并对匹配误差进行分析,本文在256×256(像素)的参考图中根据建筑物的分布,选取了3段区域(见图3)用于图像匹配,每段区域截取10张连续的64×64(像素)图像加上不同程度(n=0.05,0.10,0.15,…,0.50)的斑点噪声模拟实测图像进行图像匹配,并设计了相应的航迹。图4为其中一幅图像的匹配效果图(实测图n=0.1)。设飞行器在进行图像匹配时匀速直线飞行,每段匹配区域的连续两张图像之间相差10像素(x或y方向)。为了避免偶然性,在每幅图的每种斑点噪声情况下都进行了10次匹配,一共采集了3 000组匹配数据。需要注意的是,在进行图像采集和匹配仿真的过程中并未按照非等间隔的量测周期来采样,这是因为在实际应用中,由于SAR的量测非等间隔特性,每一滤波周期都有可能有量测信息输出,本文此处通过匹配仿真验证匹配结果的准确性与可信度,从而分析出影响匹配结果可信度的因素。 图4 图像匹配效果图(n=0.1)Fig.4 Image matching effect(n=0.1) 匹配结果如表2所示。上文中已经提及,匹配结果在x和y方向上的误差均在2像素以内的匹配结果被认为是可信的。通过对3 000组的图像匹配结果进行统计分析时发现,H_opt≤2对应的匹配结果全部可信,而H_opt>2.5 对应的匹配结果可信度极低,在与INS组合时认为此匹配结果不可信,H_opt在2~2.5之间时,有一半以上的结果是可信的,此时通过本文提出的基于模糊推理的可信度评价准则对匹配结果进行筛选。在构建模糊推理系统时,本文采用的是三角形和梯形模糊隶属度函数,分别将模糊变量按其数值的大小确定为“小”“适中”“大”3个模糊等级,在模糊推理过程中采用Madani推理方法,最终采用重心法解模糊,得到每个变量输入下输出的可信度。等效视数、提取到的特征点数、H_opt值和可信度的模糊隶属度函数如图5所示。 按3.1节的参数设置,2 表2 SAR图像匹配结果Table 2 SAR images matching results 图5 模糊隶属度函数曲线Fig.5 Curves of fuzzy membership functions 根据3.2节3 000组样本的匹配结果分析,生成SAR图像匹配结果,用于自适应Kalman滤波算法仿真。在生成的仿真数据中,大部分匹配结果的匹配误差都能达到1个像素,有少数匹配结果误差在2像素以内,还有部分匹配结果不可信,相应像素误差对应的位置量测误差设置见表1。 为了验证本文提出的基于SAR图像匹配结果可信度评价的自适应Kalman滤波(CE-AKF)算法对INS/SAR组合导航定位精度的提升效果,通过仿真将该算法与常规Kalman滤波(KF)、自适应Kalman滤波(AKF)算法(没有对匹配结果进行筛选)以及基于图像匹配结果可信度评价的Kalman滤波(CE-KF)算法进行了比较。 图6和图7为4种算法下INS/SAR组合系统位置误差曲线。表3是整个仿真的2 600 s内INS/SAR组合导航位置误差均值和均方根统计。 图6 常规KF算法Fig.6 Conventional KF algorithm 图7 AKF、CE-KF与CE-AKF算法对比Fig.7 Comparison of AKF,CE-KF,and CE-AKF algorithms 表3 INS/SAR组合导航位置误差均值和均方根统计Table 3 Statistics of INS/SAR integrated navigation position error mean and root mean square 从图6、图7和表3中可以看出,对于INS/SAR组合导航系统,不对SAR匹配结果进行可信度评价及筛选时,采用Kalman滤波算法,系统在水平方向的位置精度较差,这是由误差较大的SAR图像匹配结果造成的。通过本文提出的基于模糊推理的匹配结果可信度评价准则筛选之后,水平定位精度显著提高,但在1 000~1 500 s时间段内出现了较明显的波动,这是因为本文将匹配误差看作量测噪声,而设计的准则保留了匹配误差在2像素之内的匹配结果,使得Kalman滤波时量测噪声的统计特性可能会发生波动,从而导致在此时间段内滤波精度下降。而不对匹配结果进行筛选直接采用自适应Kalman滤波算法,在500 s左右滤波精度明显下降,这是因为在误差较大的SAR图像匹配结果出现时,自适应Kalman滤波算法对量测噪声方差阵的调整能力较弱。若仅采用自适应Kalman滤波算法,不对SAR匹配结果进行可信度评价及筛选,在误差较大的匹配结果出现时,自适应调节能力有限。为此,本文采用了改进的Sage-Husa自适应滤波算法,可以自适应地调整量测噪声方差阵,使其更加接近系统当前状态下的量测噪声统计特性,同时避免了较大的匹配误差对系统造成的不良影响,滤波过程更加平稳。 在算法设计的过程中,由于本文设计的算法更关注于SAR图像匹配误差对水平定位精度的影响,对于z(高度)方向没有直接的精度贡献,出于简化模型的考虑,对高度通道气压高度计的测量误差建模为统计特性不变的白噪声。因此,气压高度计带来的高度方向的误差比较稳定,对高度方向的量测噪声方差进行自适应调整反而会对高度方向的精度造成不利的影响,故保持高度方向的量测噪声统计特性不变。在滤波仿真过程中,由于已知高度方向的量测误差统计特性,所以滤波效果较为理想。 为进一步验证本文提出算法的有效性,还在高度通道采用二阶阻尼方式(此时滤波器的观测量仅为水平方向的位置误差)的组合导航系统中进行了仿真验证,此时将气压高度计的误差建模为随时间变化的一阶马尔科夫有色噪声模型和常值偏移的组合,其中,常值误差为10 m,一阶马尔可夫过程漂移为30 m,白噪声为10 m。 图8和图9为4种算法在高度阻尼方式下进行组合的系统位置误差曲线。表4是整个仿真的2 600 s内组合导航位置误差均值和均方根统计。 图8 常规KF算法(高度方向阻尼)Fig.8 Conventional KF algorithm(height damping) 图9 AKF、CE-KF与CE-AKF算法对比(高度方向阻尼)Fig.9 Comparison of AKF,CE-KF,and CE-AKF algorithms (height damping) 表4 INS/SAR组合导航位置误差均值和均方根统计(高度方向阻尼)Table 4 Statistics of INS/SAR integrated navigation position error mean and root mean square (height damping) 从图8、图9和表4的仿真结果中可以发现,在高度通道采用二阶阻尼方式时,本文提出的算法对水平方向定位精度的提升效果依旧明显,在高度方向上,位置误差曲线也能够跟踪气压高度计的输出误差,且Kalman滤波器的估计值没有对高度方向产生影响,高度方向的位置误差值保持稳定,与气压高度计的精度有关。 综上,在高度通道采用上述两种不同的处理方法时,与另3种算法相比,本文提出的算法都在保持高度方向的定位精度与传感器精度相当的同时,显著地提高水平方向的定位精度。 本文针对加权Hausdorff距离方法在SAR图像匹配过程中因斑点噪声等因素的影响可能出现的部分匹配结果误差过大而导致匹配结果不可信的问题,提出了一种基于模糊推理的可信度评价准则,对匹配结果进行评价和筛选,极大地增加了图像匹配结果的可信度,将误差在合理范围内的可信匹配结果应用于INS/SAR组合导航系统中。设计了基于SAR图像匹配结果可信度评价的INS/SAR自适应Kalman滤波算法,解决了因合理的匹配误差引起量测噪声统计特性变化导致的Kalman滤波精度下降的问题。本方法在筛选出有效的图像匹配结果,提高匹配结果利用率的同时,明显地提高了INS/SAR组合导航系统水平方向的定位精度。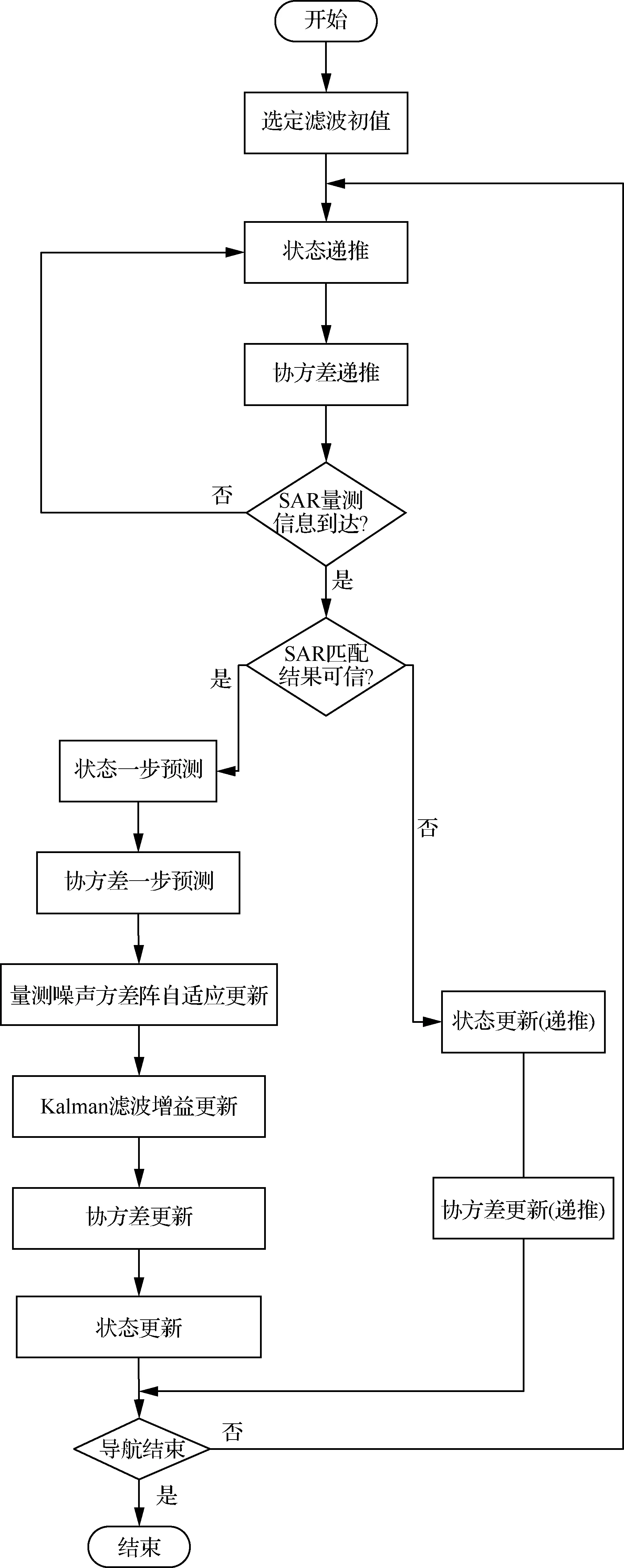
3 仿真结果与分析
3.1 仿真条件及参数设置
3.2 SAR图像匹配仿真与结果可信度分析



3.3 INS/SAR自适应Kalman滤波算法仿真


4 结 论
猜你喜欢
艺术家(2023年8期)2023-11-02 02:05:28小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:30红领巾·萌芽(2019年8期)2019-08-27 15:30:15计算机测量与控制(2017年6期)2017-07-01 16:23:31CHIP新电脑(2016年3期)2016-03-10 14:22:03空间控制技术与应用(2015年3期)2015-06-05 14:30:31遥测遥控(2015年2期)2015-04-23 08:15:18集美大学学报(自然科学版)(2015年1期)2015-02-28 01:13:32西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10 02:34:46航天器工程(2014年4期)2014-03-11 16:35:37