
基于改进锁相环的电动汽车用PMSM转子位置辨识方法
2019-09-10 07:22徐达杨绿吴怀超袁焱何锋
贵州大学学报(自然科学版) 2019年4期
关键词:永磁同步电机
徐达 杨绿 吴怀超 袁焱 何锋






摘 要:为提高电动汽车用永磁同步电机无位置传感器转子位置辨识性能,改进设计基于滑模观测器的转子位置辨识方法,将低通滤波器输出量引入滑模观测器,用于观测电机反电动势,缓解低通滤波器造成的信号相位滞后问题。在转子位置辨识环节中,改进的锁相环较传统锁相环具有更强的鲁棒性,且能够实现无转动方向差别的转子位置辨识功能。MATLAB/Simulink仿真结果显示,基于改进锁相环的PMSM转子位置辨识方法具有良好的辨识精度、动态响应性和正反向运行适应能力,该方法易于实现,鲁棒性强,简化转子位置辨识系统的设计。
关键词:永磁同步电机;无位置传感器控制;滑模观测器;锁相环
中图分类号:TM341
文献标识码: A
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)具有高功率密度、高效率、弱磁升速能力强等特点,是电动汽车的主要动力源之一。PMSM的矢量控制需要准確的转子位置信息作为参考,编码器和旋转变压器的使用会导致电机体积增大和可靠性降低等问题,但无位置传感器技术可用于替代物理传感器的使用,为上述问题提出解决方案。在无位置传感器转子位置辨识方法中,电机反电动势因含有转子位置信息被广泛应用于转子位置辨识。滑模观测器具有结构简单、易于实现、鲁棒性强,且对被控对象参数变化不敏感等特点,被广泛应用于永磁同步电机无位置传感器控制[1]。
在传统的滑模观测器设计中,将sign函数作为滑模切换函数,因其为分段函数,会导致抖振现象。为消除传统滑模观测器的抖振效应,可重新设计滑模观测器前端的低通滤波器,文献[2]在低通滤波器的基础上引入了可调节相差的卡尔曼滤波器,文献[3]在转子位置辨识环节引入了自适应陷波滤波器来替代低通滤波器;或设计平滑的开关函数[4-5];或应用更加准确的控制系统模型,如文献[6]建立了全阶离散滑模观测器,文献[7]则对负载转矩扰动进行估计和补偿;文献[8]根据低通滤波器的截止频率和电机电角速度设计了相位补偿方法。以上方法的控制对象均为低通滤波器的输出信号。然而,在控制系统设计中,不希望在一个控制系统中存在多个控制环节串联的设计,因为其会造成系统时间常数增大,干扰信号放大等不利影响。
在电机转子位置辨识中,利用两相反电动势构造反正切函数辨识转子位置的方法,将会放大抖振效应和电流微分相的影响,因而具有更好控制效果的锁相环被广泛用于转子位置估计。然而,文献[9]中的锁相环无法同时在电机正转和反转工况下进行转子位置辨识,且鲁棒性较差。
本文基于滑模观测器,在含有PMSM转子位置信息的反电动势辨识中,将低通滤波器的输出信号纳入滑模观测器,引入了新的锁相环用于估算正反转情况下的电机转子位置,并对改进的辨识方法进行了仿真验证。
1 滑模观测器设计
滑模观测器辨识转子位置的基本思路为,利用给定电流和反馈电流之间的误差来重构电机的反电动势,并用观测得到的两反电动势相位关系,估算转子位置和速度。将估算得到的电流值与实际电流值的误差作为输入,通过观测器控制sign函数的开关状态,其输出作为反电动势的估计值,经低通滤波器得到最终的反电动势值。在α-β两相静止坐标系下,凸极式永磁同步电机的扩展电动势的简化表达式为EαEβ=Ke-sinθecosθe,(1)
式中:系数Ke=Ld-Lqωeid-piq+ωeψf,θe为转子电角度,p为微分算子,Ld、Lq、id、iq分别为d轴和q轴的电感和电流,ωe为电角速度,ψf为永磁体磁链。
式(1)中电机反电动势公式包含转子位置的全部信息,且与定子电流,电流微分和转子转速有关。为便于构建滑模观测器,采用PMSM电流表达式为1LdEαEβ+kLdsgnsαsgnsβ。(5)
若增益k为足够大的正实数,则此滑模观测器为渐进稳定。当估计电流达到所设定的滑模区域时,其估计值将逐渐收敛于实际值附近。此时,sn=0,s·n=0趋近于零。为了减少其开关产生的抖振现象对控制系统的影响,需要在其前端加一低通滤波器。低通滤波器的输出信号为E^αE^β=ω0s+ω0EαEβ,(6)
式中,ω0为低通滤波器的截止频率。在选择滤波器截止频率的时候,应选择截止频率较低且接近信号频率的,此时滤波效果最好但相位延迟却最大。本文将低通滤波器输出量E^α和E^β引入滑模观测器,滑模观测器(Sliding Mode Observer,SMO)设计如图1所示,将式(3)改写为式(7)。需注意,式(7)观测得到的电流值为式(3)中的两倍。
4 结语
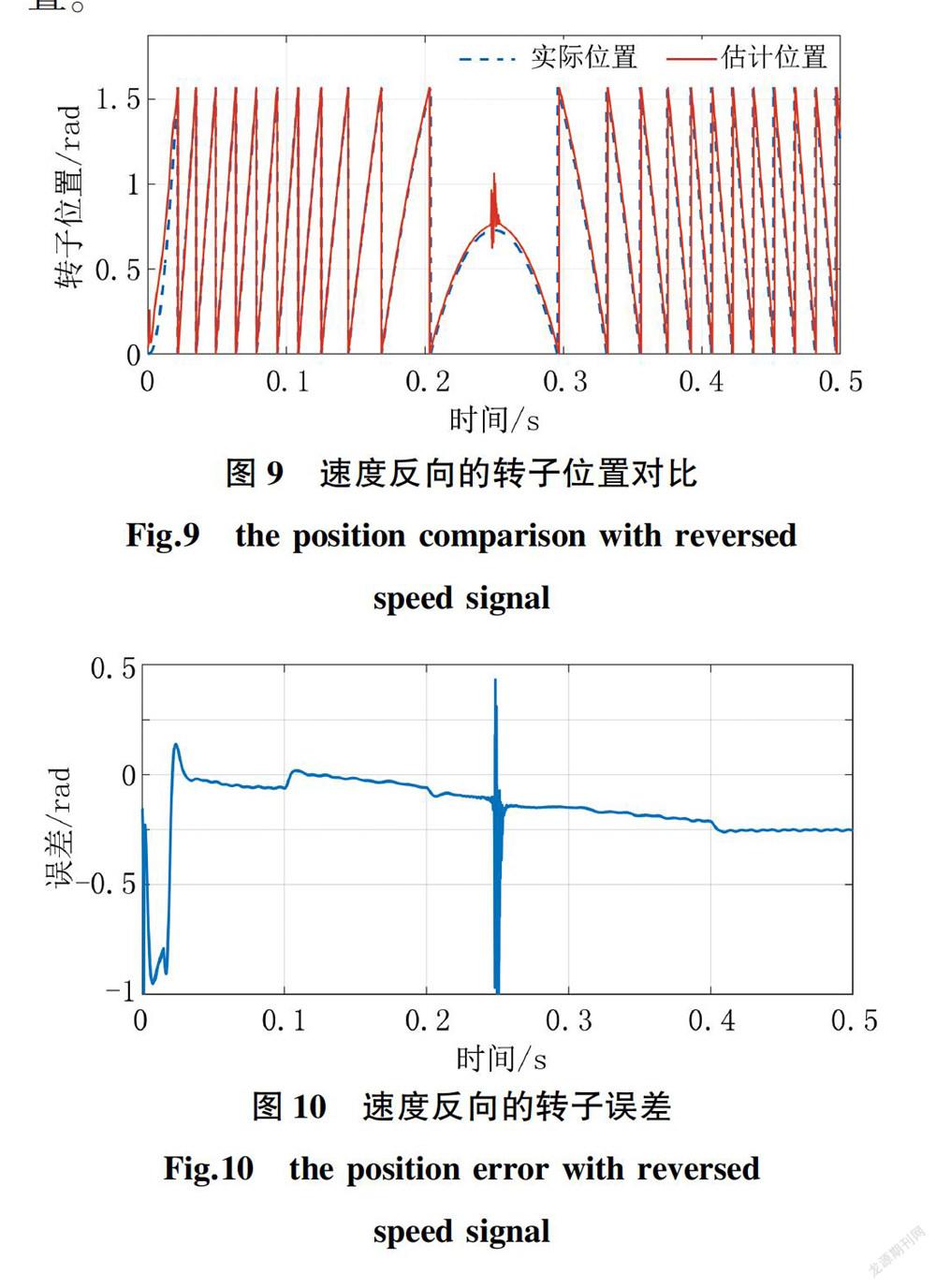
本文将低通滤波器的输出纳入滑模观测器中,缓解了相位滞后的问题,并从系统稳定点设计的角度证明了此系统的鲁棒性。仿真结果表明,基于改进锁相环的永磁同步电机无位置传感器转子位置辨识方法具有良好的动态特性和鲁棒性,且改进的锁相环可以进行无方向差别的转子位置辨识,该方法在建立模型时无需考虑参数归一化的问题,而且避免了传统锁相环在速度反向时,需调节PI观测器参数的问题,降低了转子位置辨识系统的复杂度和设计难度。
参考文献:
[1]MAZARI M B , KENDOUCI K , MAZARI B. Nonlinear Control of Permanent Magnet Synchronous Machine using Feedback Linearization and Sliding Mode Control[C]//International Conference on Electrical Engineering,USA: IEEE, 2015:1-6.
[2]张海刚,聂圆圆,张磊,等.基于改进卡尔曼滤波的无速度传感器探究[J].系统仿真学报,2018,30(10):3761-3769.
[3]SONG X, FANG J, HAN B, et al. Adaptive Compensation Method for High ̄Speed Surface PMSM Sensorless Drives of EMF ̄Based Position Estimation Error[J]. IEEE Transactions on Power Electronics, 2015, 31(2):1438-1449.
[4]朱伟巨,黄海,张华熊,等.一种改进的永磁同步电机无传感器滑模控制[J].电气传动,2013,43(7):8-11.
[5]华志广,窦满峰,赵冬冬,等.基于改进型滑模观测器的PMSM无位置传感器控制[J].西北工业大学学报,2018,36(4):754-760.
[6]GUOQIANG Z, GAOLIN W, RONGGANG N, et al. Active flux based full ̄order discrete ̄time sliding mode observer for position sensorless IPMSM drives[C]// International Conference on Electrical Machines & Systems, USA: IEEE, 2015:3569-3572.
[7]李泽辉. 考虑负载扰动的永磁同步电机滑模观测器无速度传感器控制[D].西安:西安理工大学,2018.
[8]沈寅强,金海,戴豪宇,等.基于滑模观测器的永磁同步电机无位置传感器矢量控制系统设计[J].电工技术,2018(21):41-43.
[9]张宇慧,丁德锐,董晓光.基于滑模观测器与模糊PID的PMSM无位置传感器控制系統[J].电子测量技术,2018,41(5):6-12.
[10]HARNEFORS L, NEE H P. A general algorithm for speed and position estimation of AC motors[J]. IEEE Transactions on Industrial Electronics, 2000, 47(1):77-83.
[11]YOON Y D, SUL S K, MORIMOTO S, et al. High ̄Bandwidth Sensorless Algorithm for AC Machines Based on Square ̄Wave ̄Type Voltage Injection[J]. IEEE Transactions on Industry Applications, 2011, 47(3):1361-1370.
[12]LIN S, ZHANG W. An adaptive sliding ̄mode observer with a tangent function ̄based PLL structure for position sensorless PMSM drives[J]. International Journal of Electrical Power & Energy Systems, 2017, 88:63-74.
[13]刘阳. 微型混合动力汽车用永磁同步电机的设计[D].沈阳:辽宁工业大学, 2018.
(责任编辑:周晓南)
猜你喜欢
现代电子技术(2017年1期)2017-02-16
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
电脑知识与技术(2016年2期)2016-03-22
电脑知识与技术(2016年1期)2016-03-22
哈尔滨理工大学学报(2015年6期)2016-02-18
哈尔滨理工大学学报(2015年3期)2015-09-21
科技与创新(2015年18期)2015-09-11
