
基于激光雷达的接触网动态几何参数安全监测研究
2019-09-10 08:38孔龙飞韩通新
铁道机车车辆 2019年4期
孔龙飞, 韩通新
(中国铁道科学研究院集团有限公司 机车车辆研究所, 北京 100081)
接触网几何参数是衡量接触网质量状态的重要指标,是影响弓网匹配关系和列车行驶安全的重要因素[1],主要包括接触线拉出值、接触线高度、接触线间的相互位置等。动车组高速运营过程中, 受电弓与接触网相互作用期间,此时的接触网动态几何参数更能反映出弓网匹配的安全性。
国内外学者对接触网几何参数检测方法进行了大量研究,包括人工测量、接触式测量、面阵相机测量[2]、线阵相机测量[3]及激光扫描雷达测量[4]等,这些方法都对接触网几何参数检测发挥了重要作用。人工测量需要接触网线路断电,而且人工和时间成本高,检测效率低。接触式测量需要在受电弓滑板上增加传感器、信号转换设备、高压侧设备供电和高低压隔离装置,设备复杂且增加了受电弓运行的安全隐患,现在已经很少使用。面阵相机测量可以测量几何参数,同时可以监控识别受电弓和接触网故障,是较热的研究方向,但检测识别算法还需进一步研究。线阵相机测量方法,是近些年铁路局网检车和高速铁路综合检测列车上广泛应用的测量方法,而且国产化设备已经相对成熟,但线阵相机系统体积庞大,安装精度要求高,如果运用在运营车辆上,其安装、维护、维修相对困难。激光扫描雷达方法也是比较成熟的测量方法,在地铁和路局网检车上应用了多年,因其体积小,安装方便,便于维护,很容易满足运营车辆安全运行要求,但由于扫描频率较低,目前不适合直接安装在高速运行的动车组上实时监测接触网几何参数。
根据相关研究,总结分析弓网事故,70%是由于接触网状态不良引起的[5],而且其中很大一部分是由于接触线拉出值超限或者线岔、锚段关节和分相处工作支接触线与非接触支接触线相互位置改变,造成的脱弓、钻弓、剐弓、剐网事故。因此本文重点利用激光扫描雷达测量方法检测接触网动态几何参数,利用最小二乘拟合算法提高接触网几何参数测量精度,同时针对线岔、锚段关节和分相处的接触线,给出了基于Kalman滤波的跟踪算法, 实现了多接触线的识别与跟踪。
1 接触线高度和拉出值检测方法
因为动车组运行时,弓网受流过程中接触线几何参数对评价弓网安全性更有意义,所以激光扫描雷达安装位置应尽可能接近受电弓滑板。接触网几何参数测量监测系统如图1所示,由激光扫描雷达、速度传感器、数据采集器、数据处理及波形显示几部分组成。

图1 几何参数测量监测系统描述
选用的激光扫描雷达扫描频率为100 Hz,角度分辨率为0.666 7°。线路扫描间隔等于列车运行速度除以雷达扫描频率,当动车组行驶速度为300 km/h时,线路扫描间隔是0.833 m/次;动车组行驶速度200 km/h时,线路扫描间隔是0.555 m/次。在一个扫描周期,激光扫描雷达返回结果数据代表距离值,数据在序列中的位置同角度一一对应,在没有扫描到物体时仍返回距离值,以可测量最大值填充。
激光扫描雷达安装在受电弓滑板沿轨道方向的中心线上,设激光测量到接触网距离激光发射点距离为x,接触线高度和横向偏移量的计算公式如下:
H=H0+xcosα
(1)
z=xsinα
(2)
式中H为接触线高度;z为接触线相对受电弓滑板中心线横向偏移量;H0为激光雷达扫描点到轨面高度;α为激光雷达中心轴线同扫描激光束的夹角;定位点处接触线相对受电弓滑板中心线横向偏移量即为拉出值。
激光扫描雷达采集的原始数据,经过数据解析后,通过判段接触线高度最合理的数值来识别接触线,单根接触线悬挂时的检测结果如图 2 所示。检测结果清晰地展示出接触线横向的运行轨迹,拐点即接触网定位点处的拉出值。
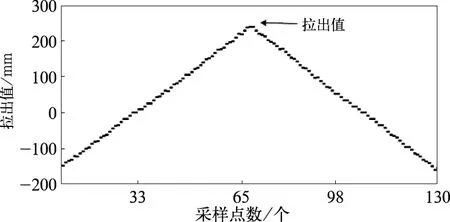
图2 常规的单根接触线检测结果
2 线岔、锚段关节、分相处接触线检测
2.1 线岔检测方法
线岔是使动车组受电弓由一条股道上空的接 触线,平滑、安全地过渡到另一条股道上空的接触线上,使动车组完成线路转换。以交叉线岔为例, 当一组接触悬挂的接触线被受电弓抬高时,另一组悬挂的接触线也同时被抬高,从而使它与另一接触线产生高差。受电弓靠近始触点时高差基本消除,从而顺利划过,避免刮弓和钻弓事故[6]。
在激光雷达一个扫描周期的检测数据中,用一定的算法识别出两组接触线导高,来确定线岔的两组接触线,再分别计算两组接触线相对受电弓滑板中心线的横向偏移量。线岔处的接触线检测结果如图 3 所示。
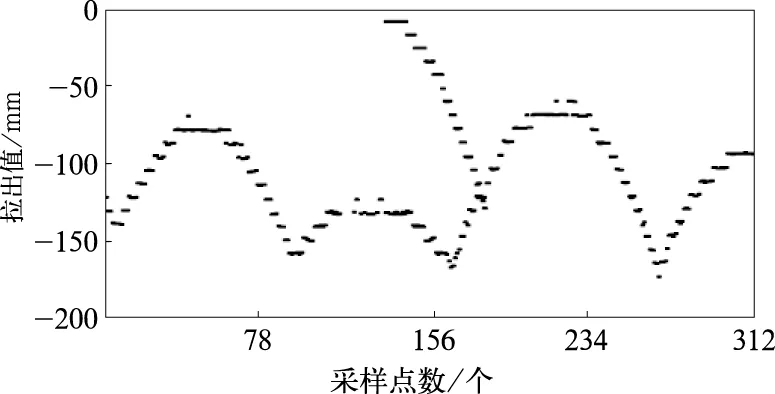
图3 线岔双根接触线检测结果
2.2 锚段关节和分相处接触线检测方法
两个相邻锚段的衔接区段(重叠部分)称为锚段关节,既要保证平顺、安全的锚段过度,又要保证受流质量。速度200 km/h以上接触网的电分相均采用带中性段的绝缘锚段关节式电分相。识别锚段关节处的工作支和非工作支接触线,计算每根接触线拉出值和相互位置很有必要。
针对关节处接触线有双根的情况,同样在激光雷达一个扫描周期的检测数据中,识别出两组接触线的导高,再分别计算两组接触线相对受电弓滑板中心线横向偏移量。因为接触网锚段关节每隔一段距离就会出现一次,所以在整个数据采集过程中, 奇数次检测的新锚段接触线存到动态参数数据序列1中,偶数次检测的新锚段接触线数据存在动态参数数据序列2中,两组序列数据组成了完整线路的接触线高度和横向偏移量数据。锚段关节处的接触线横向偏移轨迹检测结果如图4所示。分相处检测结果如图5、图6所示。

图4 锚段关节双根接触线检测结果

图5 锚段关节式电分相双根接触线检测结果
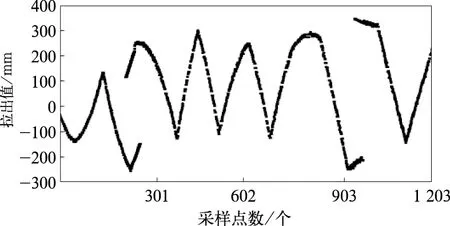
图6 锚段关节式电分相双根接触线检测结果
2.3 Kalman滤波跟踪方法
因为接触线的线岔和锚段关节的存在,经常需要同时识别两根接触线和跟踪两根接触线的垂向和横向的运行轨迹。再加上检测环境较为复杂,激光雷达扫描角间隔小,同一条接触线会返回多个检测结果等因素,仅仅靠导高来识别和跟踪接触线是不够的。
Kalman滤波广泛运用于运动目标识别和轨迹跟踪[7],此滤波器模型不断学习修正,预测结果准确性高,而且很适合实时检测系统。因为接触线在水平面的横向运行轨迹比较规律,通过设计接触线横向运动学方程的Kalman滤波器,来预测每条接触线横向轨迹,通过预测结果与一个扫描周期内所有的横向轨迹检测数据比较,快速识别相应接触线最优检测结果。
Kalman滤波预测部分:
x(k+1|k)=Ax(k|k)
(3)
其中A为状态转移矩阵。
更新状态x(k+1|k)的协方差矩阵:
P(k+1|k)=AP(k|k)AT+Q
(4)
其中,Q为过程激励噪声协方差。
Kalman滤波修正部分:
结合观测值更新状态估计,得到k+1时刻状态:
x(k+1|k+1)=x(k+1|k)+
kg(z(k+1)|Hx(k+1)|k)
(5)
其中,z(k+1)为k+1时刻系统状态测量向量。kg为Kalman增益,其计算公式为:
Kg=P(k+1|k)HT(HP(k+1|k)HT+R)-1
(6)
式(6)中R为观测噪声协方差;H为观测矩阵。
为了令Kalman不断迭代下去,需要更新k时刻状态x(k+1|k+1)的协方差:
另外有些地区对于环保并不重视,有把餐厨垃圾作为牲畜饲料的习惯,一些垃圾的细菌、重金属会通过牲畜的内脏危害人体的健康;更有甚者,有一些不法商贩则从餐厨垃圾油脂中提炼地沟油以牟取暴利,长期食用会造成肿瘤等慢性疾病的发生。餐厨垃圾具有典型的废弃物和资源双重特性,合理处理餐厨垃圾极为重要。
P(k+1|k+1)=(I-KgH)P(k+1|k)
(7)
由状态向量与观测向量之间的关系可知观测矩阵为:
H=[1 0 0]
定义Kalman滤波器状态向量为
x(k)=[Z(k),vY(k),aY(k)]T
(8)
其中Z(k),vY(k),aY(k)用来代表接触线相对受电弓中心线横向运行轨迹的第k组的检测值、接触线相对受电弓中心线横向运行的速度和加速度。因为数据滤波中考虑到了加速度,所以假设接触网相邻两次横向运动为匀加速运动,则根据匀加速运动学方程,Kalman滤波器的状态转换过程可以描述为
其中,Δt为采样时间,即激光扫描雷达的扫描周期。
测量向量为z(k)=[0,0,Zz(k)]T,其中Zz(k)为k时刻接触线横向偏移量。
状态变量初始值选取方法为:取前3组接触线横向偏移量检测结果,并利用相关的运动学计算公式计算卡尔曼滤波器状态变量的初始值。
3 数据拟合处理
激光雷达线路扫描间隔较大从而影响定位点处拉出值检测精度,这也是制约激光雷达在高速铁路中应用的关键。
样本回归模型:
yi=a+bxi+ei
(9)
ei=yi-a-bxi
(10)
其中ei为样本(xi,yi)的误差;x表示采样时间或采样点数;yi代表i时刻接触线横向偏移量。
平方损失函数:
(11)
把a和b看作是函数Q的自变量,就可以通过求函数极值的方法得到。求Q对两个待估参数的偏导数:
(12)
根据数学知识可知,函数的极值点为偏导为0的点。
解得:
(13)
(14)
参数a和b是多项式的最小二乘拟合值。
利用a和b可求解定位点两侧接触线拟合曲线交点,确定定位点处拉出值。此方法避免激光雷达扫描频率低带来的定位点位置数据漏检,从而减少了拉出值测量误差,提高了检测精度。
如图7所示给出一段拉出值测量原始采集数据和拟合处理后的数据。定位点处的拉出值误差会显著降低,波形曲线也更加平滑,表1给出了每一段拟合曲线对应的拟合多项式。

图7 原始采集数据与拟合后数据对比

表1 拟合曲线的最小二乘拟合公式
4 线路实测数据分析
在客专联调联试期间,同时采用了一套线阵相机接触网几何参数检测系统和一套激光扫 描雷达几何参数检测系统。如图 8 给出1 km内两种检测系统得到的拉出值对比图,每一跨距内拉出值测量差在4~42 mm之间,拉出值趋势完全相同。图 9 给出1 km内两种测量方式得到的导高数据对比图,每一跨内导高测量差为1~25 mm。两种检测方法的测量结果基本一致。对比数据证明文中提出的测量方案是可行的,能够准确地测量接触网动态拉出值和导高。
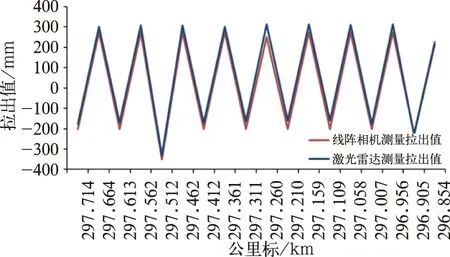
图8 线阵相机和激光扫描雷达测量拉出值对比图

图9 线阵相机和激光扫描雷达测量导高对比图
5 误差分析
考虑最不利条件,激光扫描雷达扫描频率为100 Hz 时,扫描范围±600 mm,线路跨距50 m,当动车组以300 km/h 运行时, 线路采样分辨率为833 mm/次。当定位点处拉出值为600 mm时,如果在直线段雷达对定位点漏检,那么当雷达扫描到定位点两侧接触线分别在线路上距离定位点416.5 mm时,此时拉出值误差lz最大,为:
接触线高度误差最大值为雷达扫描角度为0°时,误差为传感器测量误差±6 mm。
利用最小二乘法拟合后求拟合直线交点来计算定位点拉出值,拉出值误差会进一步减少,使激光扫描雷达测量的拉出值精度控制在10 mm以内。
因此,文中方法检测的接触网几何参数精度, 符合《车载接触网运行状态检测装置(3C)暂行技术条件》[9]相关要求。
6 结束语
基于激光扫描雷达的接触网几何参数测量方法可以实现接触网动态几何参数在线安全监测,为动车组安全运营提供有力保障,且具备以下特点:
(1) 监测系统传感器安装简单,日常维护方便;
(2) 在运营动车组上安装动态几何参数安全监控设备,可以提高车辆的利用率,缩短拉出值检测周期;
(3) 检测结果准确,检测精度满足《车载接触网运行状态检测装置(3C)暂行技术条件》要求。
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
铁道机车车辆(2022年1期)2022-03-24
云南画报(2021年10期)2021-11-24
保健医苑(2021年9期)2021-09-08
云南画报(2020年12期)2021-01-18
铁道学报(2020年8期)2020-09-07
铁道建筑技术(2019年6期)2019-11-29
煤炭工程(2019年6期)2019-06-22
中国铁道科学(2019年1期)2019-02-19
舰船电子工程(2018年10期)2018-10-23
