
大功率牵引变流器电流谐波最小PWM控制策略的研究与实现*
2019-09-10 08:38赵震
铁道机车车辆 2019年4期
赵 震
(中国铁道科学研究院集团有限公司 机车车辆研究所, 北京 100081)
随着铁路机车车辆向高速化和重载化的方向不断发展,大功率牵引逆变器在电力机车牵引系统的应用日趋广泛,人们对交流传动系统性能的要求也越来越高。作为交流传动系统的核心技术--脉宽调制PWM技术也是决定牵引控制系统性能优劣的关键技术之一。
大功率电压型逆变器由于受到开关器件性能的限制,其最高开关频率一般设定在几百赫兹左右,而对于高速机车,电机的调速范围很大,这就使得变流器会长时间工作在低载频比工况下,而较低的载频比会带来一系列的问题,如输出电流谐波较大、电机转矩脉动加大等[1-2]。为了提高逆变器在低载频比工况下的电流输出质量和驱动性能,很多文献从不同角度提出了优化的控制方法,如同步SVPWM调制算法、中间60°调制算法、特定谐波消除调制算法(SHEPWM)等[3-5]。与以上几种PWM调制算法相比,文中将要论述的以谐波电流最小为控制目标的最小谐波电流PWM调制算法,在总体谐波抑制性能方面则更胜一筹[6]。
针对最小谐波电流PWM调制技术在大功率两电平牵引逆变器中的应用,对其控制原理进行了理论分析,并论述了一种基于数字信号处理器DSP的数字实现方法,此外还对不同调制模式之间的切换原则及方法做了分析,通过仿真,在谐波抑制性能方面与SHEPWM调制算法进行了对比分析,最后通过试验对不同载波比之间平衡切换的实现及最小谐波电流抑制的性能进行了验证。
1 最小谐波电流调制原理分析
最小谐波电流调制算法的本质原理为,通过控制逆变器输出特定形状的PWM波形,以此来达到脉冲谐波优化的目的[7]。最小谐波电流调试算法将控制逆变器输出相至直流母线中点的PWM波形如图1所示,图中α1~αN为特定的开关角度。

图1 最小谐波电流PWM波形示意
对上述波形进行傅里叶分析,其傅里叶级数展开式为:
(1)
(2)
如果同时要求图1波形具有基于四分之一周波对称、半波反相和奇对称的特点,那么波形中将只含有正弦项,并且只含有奇次谐波成分,即有:

(3)

(4)
假设图示波形具有单位幅值,及v(t)=±1,且π/2处恒为高电平,则根据三角函数的积分公式,由式(4)可计算得:
(5)
式中,n为谐波次数,N为四分之一周期内的开关角个数,由上面的分析可知,n为奇数,并且定逆变器输出负载为Y型连接的对称负载时,相电压中将只含有6k±1次谐波。
根据式(5),如果建立如下方程组:
(6)
可见,式(6)所立方程组,其约束条件为第5,7…k-1次谐波的幅值为0,基波幅值为U1,这其实就是前面提到的特定次谐波消除PWM(SHEPWM)算法的求解原理。通过后面第3节对SHEPWM输出波形的谐波分析可知,其在对低次谐波消除的同时,较低次的其他特定谐波却被显著提高了,换言之,其总体谐波含量没有得到最优的抑制。我们知道,电机的谐波损耗是由谐波电流的有效值确定的,从这个角度出发,优化的最终目标应该是谐波电流的总有效值。
对于鼠笼式异步电机,每个谐波成分都可以用一个参数恒定的线性电路来等效计算,如图2所示,最终总的谐波电流通过叠加原理求出[8]。

图2 异步电机等效电路
图中,n是谐波的次数,Sn是n次谐波的转差率。由于转子的转速只与基波频率相关,因此对于快速旋转的谐波磁场来说,转子可认为近似静止,即Sn≈1;同时电机负载高次谐波下等效感抗远大于阻抗,即n(Xls+Xlr)>>(Rs+Rr), 并且可假设nXm无穷大,则有
(7)
式中,Un和In分别是n次谐波电压和电流的有效值。相应的总谐波电流有效值Ih的表达式为
(8)
(9)
联立式(8)和式(9),通过目标函数求极值的方法,即可求得谐波电流最小时,PWM脉宽调制开关角的解。
2 基于DSP的实现
2.1 开关角计算
从式(8)和式(9)可以看出,谐波电流最小脉宽调制开关角的求解是一个复杂的过程,涉及了大量的非线性方程的运算,虽然有一些文献也提出了在线实时求解的方法,但这些算法均存在不可避免的弊端,即为了避免过于复杂的算法占用过大的处理器计算资源,必然要对其进行简化,但算法的简化将导致计算结果的误差增大。而且非线性方程的计算不能保证每次的计算结果都收敛,这也将影响系统的鲁棒性。因此,工程上较多采用的是离线计算开关角,在线查表输出的方法。有很多数学工具可以对上面的条件极值数学模型进行求解,本文采用目前应用极为广泛的计算软件Matlab对上面的公式进行了求解,以N=2和N=3为例,开关角随调制度变化曲线如图3所示,图中调制深度定义为U1/(Vdc/2)×100。
2.2 基于DSP的数字实现
在常见的PWM调制策略的数字化实现中,广泛采取辅助三角波产生硬件电路,在采样时刻计算出当前载波周期内的占空比,通过控制送入三角载波产生单元的比较值来实现采样时刻中间任意位置的可控波形发生。文中在前述角度计算的基础上,采用TI公司最新的浮点型控制器TMS320F28335来实时产生脉冲.该型号的DSP具有高性能32位浮点运算中央处理器,且有快速的运算能力、灵活的中断设置和丰富的外设接口。在实现中,主要利用了DSP的ePWM 模块的灵活设置功能。28335允许在计数器采用增计数时,每个计数周期可以产生一次或者两次比较事件。在每个中断开始时根据实时计算的开关角度更新比较寄存器的值,然后依据中断起始时刻电平的高低判断产生比较事件时的电平动作,从而实现整个周期内脉冲的生成。

图3N=2和N=3时开关角随调制度变化曲线

图4 基于载波的DSP实现原理
以N=3为例,其具体实现原理如图4所示。由图1可知,当N=3时,谐波电流最小PWM电压波形的3个有效开关角分布在前1/4周期,A、B、C三相相位互差120°。 DSP以固定的时间间隔对系统进行采样和运算,设采样步长为ΔT,参考相角θ随时间连续变化,ax为一个有效开关角,令输出的PWM波形在θ=ax时刻产生一次电平跳变。设Tk为当前采样时刻,则波形跳变一般发生在Tk及其下一拍Tk+1之间,为了精确获得该时刻,我们在当前采样时刻不仅判断当前时刻θk的输出电平状态,同时预测一拍,判断θk+1的电平状态:
θk+1=θk+ws·ΔT
(10)
如果两个电平状态相同,则表示当前一个采样周期内输出无变化,如果检测到当前值与预测值之间发生了电平变化,则可用下式计算占空比:
(11)
将占空比D送入DSP的PWM波形发生器的比较单元,从而使得输出电平在采样周期内实现精确位置的发生。
2.3 不同载波比之间的平滑切换
在大功率逆变器的全速度范围控制中,调制模式会跨越多个同步调制区段,而不同载波比进行切换时,如果不进行有针对性的处理,则逆变器输出电压会出现相位的突变,从而造成输出电流冲击。因此,不同载波比之间进行切换时,最根本的原则就是保持输出电压相位的连续性[9]。
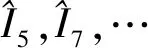
根据前面所论述的最小谐波电流PWM波形的发生方式可知,无论在哪种载波比模式下,相电压相位在90°或270°时无开关角,因此选择在该时刻进行切换将会获得较好的平滑切换效果。以7脉波向5脉波的切换过程为例,过渡时三相线电压和三相相电压的PWM波形如图5所示。
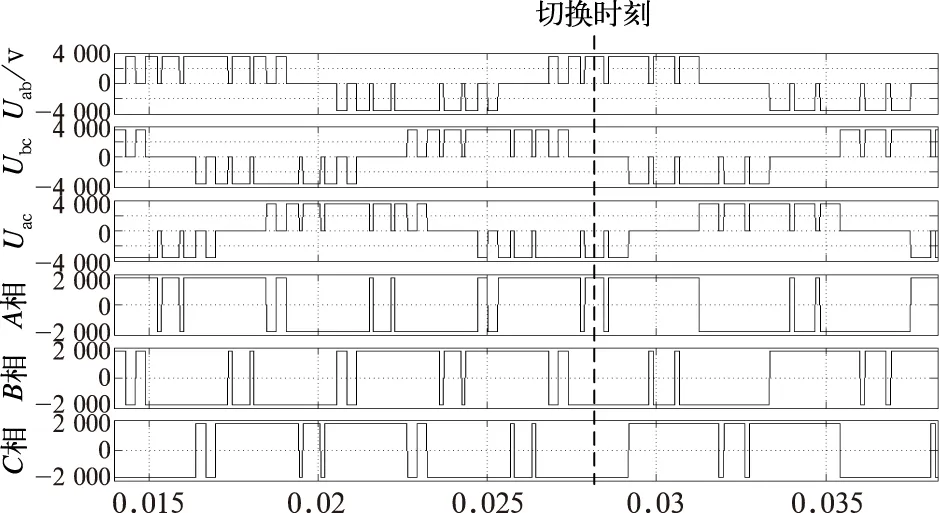
图5 7脉波向5脉波切换时的PWM波形
同时,根据逆变器输出三相电压的对称性可知,当其中一相的相位为90°时,其他两相的相位将为210°和330°,根据最小谐波电流PWM发生方式可知,这两个角度可对应到前四分之一周期中的30°角,而根据对各个调制模式所有角度解的分析可知,各相电压的PWM波形在30°时也无开关角,根据这一特性我们可以实现A、B、C三相电压的同时切换,从而避免了三相独立切换带来的切换时间长且容易发生脉冲混乱的缺点。
3 验证分析
3.1 仿真分析
上面提到最小谐波电流PWM控制策略在谐波抑制性能上要优于SHEPWM控制策略,限于篇幅我们仅以开关角N=3为例,进行仿真对比分析,图4为按SHEPWM控制算法求得的,当N=3时开关角随调制度变化的曲线。
分别对图3和图6求得的N=3时的计算结果进行仿真,稳态时的仿真波形如图7所示。对输出结果进行谐波分析,计算结果见图8。
从频谱可以看出,SHEPWM对5、7等低次谐波进行了有效的消除,但与之相邻的11、13次谐波含量有较大的增加,总的THD含量为12.63%;而谐波电流最小PWM调制输出波形谐波分布较为均衡,总的THD含量为7.43%,小于SHEPWM算法,总体性能更优。

图6N=3时SHEPWM开关角随调制深度变化曲线

图7N=3时稳态仿真波形

图8N=3时波形谐波频谱图
3.2 试验验证
根据以上的理论分析、计算结果和实现方法,采用试验手段对不同载波比模式下的最小谐波电流PWM控制策略的实现及切换情况进行了验证。试验采用大功率牵引电机,功率为560 kW,额定电压 额定频率120 Hz,电机满载情况下进行了全速度范围的加速试验,图9为载波比分别为11,9,7,5,3时,调制模式切换时的线电压及相电流波形。
从图9可以看到,不同调制模式之间切换时,波形相位连续,电流冲击较小,达到了与理论分析相符的控制效果。另外,在谐波抑制方面,限于篇幅,图10仅给出,载波比为7,系统稳定运行时,逆变器输出电流的谐波分析,从图10的分析结果我们可以看到,电流总的THD含量仅为6.71%,谐波得到了很好的抑制。
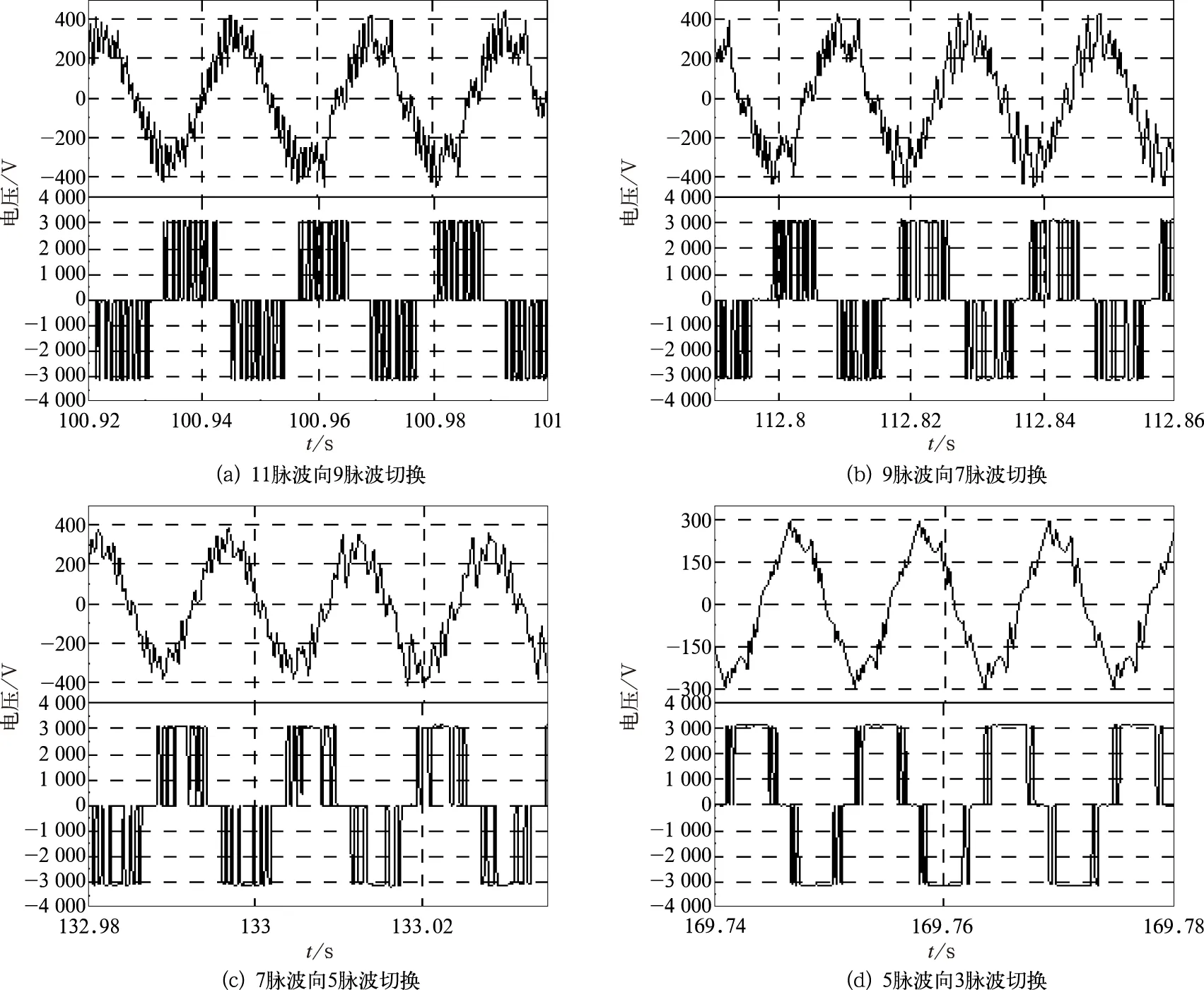
图9 各载波比切换时刻PWM波形
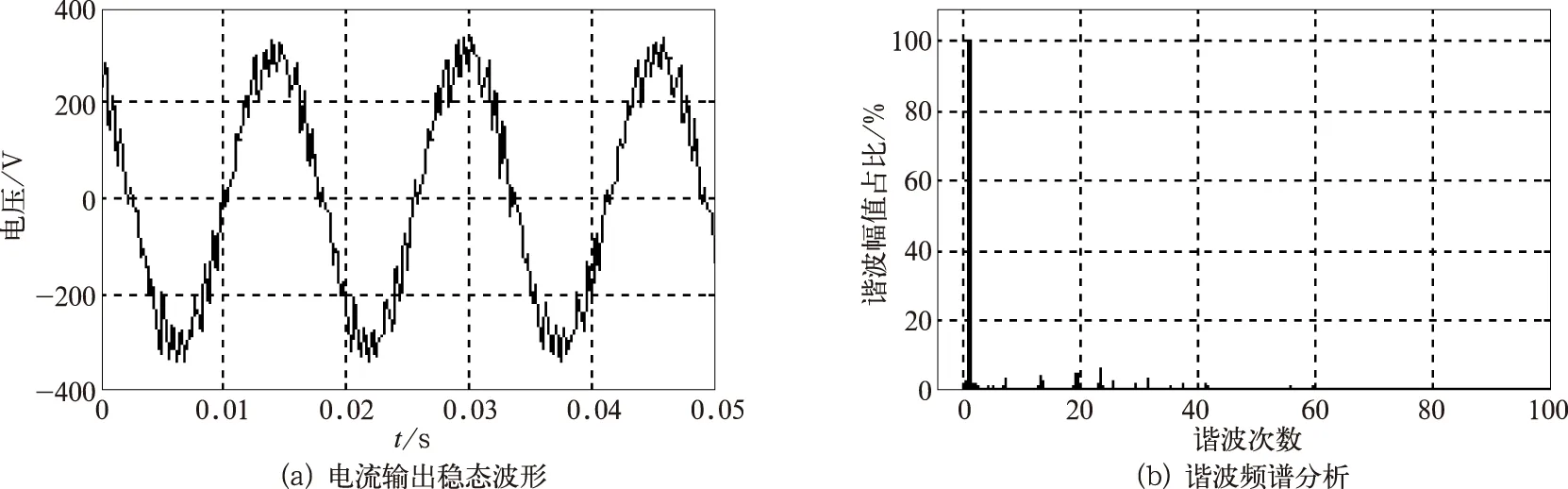
图10 载波比为7时输出电流的谐波分析
4 结 论
针对最小谐波电流PWM控制策略,进行了理论分析,建立了求解各调制模式开关角度的数学模型,介绍了一种基于DSP的高精度数字实现方法。根据数学模型的求解原理,提出最小谐波电流PWM控制策略在总体谐波抑制性能方面优于SHEPWM控制策略,并通过仿真验证了这一结论的正确性。根据最小谐波电流PWM波形开关角的分布特征,提出了基于相位连续的三相同时切换策略,有效保证了不同载波比之间切换时的平稳性,试验结果表明,电机从低速到高速的全速度运行范围内,运行平稳,不同载波比之间切换时,电流冲击极小,而且电流谐波得到了有效的抑制。仿真和试验结果与理论分析一致,证明了理论分析和实现方法的正确性和有效性。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
云南电力技术(2021年6期)2022-01-18
铁道机车车辆(2021年3期)2021-07-12
科学家(2021年24期)2021-04-25
中国惯性技术学报(2020年2期)2020-07-24
雷达学报(2018年5期)2018-12-05
电子制作(2018年18期)2018-11-14
电子制作(2018年17期)2018-09-28
电子制作(2018年9期)2018-08-04
电机与控制学报(2018年9期)2018-05-14
