一种低成本陀螺仪信号温漂补偿方法的研究
2019-09-10 02:00:28季凯源熊天武
舰船电子对抗 2019年4期
季凯源,熊天武
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
MEMS陀螺仪具有尺寸小、能耗低、质量轻、价格低等优点,应用广泛,但由于加工工艺的原因,目前微机械陀螺仪精度相对较低,陀螺仪结构尺寸、材料性质及检测电路中电子器件均会受温度影响,克服温度漂移、随机误差是提高微机械陀螺仪测量精度的关键。
1 陀螺仪基本原理
图1为单轴陀螺原理示意图,陀螺有2个互相垂直的振动方向,分别为激励方向X(驱动模态)和由科里奥利力引起的敏感振动方向Y(检测模态)[1]。X方向的驱动模态和Y方向的检测模态可用下面的微分方程来描述:
(1)
(2)
式中:ωd,ωs为陀螺仪驱动模态和检测模态下的固有角频率;bd,bs为陀螺仪驱动模态和检测模态下的阻尼系数;Ω为输入角速度;F为受到的同期外力。
2 温度特性影响
温度变化会导致陀螺仪微结构变化,包括尺寸和材料弹性模量的变化。温度引起的尺寸变化对陀螺仪影响很小,主要是材料弹性模量变化导致系统刚度改变,陀螺仪固有频率也随之改变,其关系为[2]:
E(T)=E0-E0KET(T-T0)
(3)
谐振频率与温度变化的关系为:
(4)
在温度T0附近的小范围内可线性近似为:
(5)
通过查阅相关文献[1-3]可知,驱动模块和检测模块固有频率的变化是影响陀螺仪输出温度特性的主要因素,输出漂移量与固有频率变化成近似线性关系,而固有频率与温度变化也可以近似为线性关系,所以可以认为输出特性的漂移与温度是线性相关的,在进行温度补偿时可以采用近似的线性补偿。
3 温度漂移试验
调整陀螺仪环境温度,测量陀螺仪静态输出电压,研究电压与温度变化的关系,标定温漂系数。
设备:恒温箱、HTG1200陀螺仪、信号检测存储板,温度测量精度0.5 ℃,陀螺仪电压采样精度1/216 V。
试验步骤:
(1) 设备连接,陀螺仪电压、环境温度测量与存储,5 s 1次;
(2) 试验设备放入恒温箱,5 min调整1次温度(30 ℃、35 ℃、40 ℃、…75 ℃、80 ℃);
(3) 取出设备读取数据,进行分析与处理。
数据结果见图2,左为温度测量数据,右为电压测量数据。
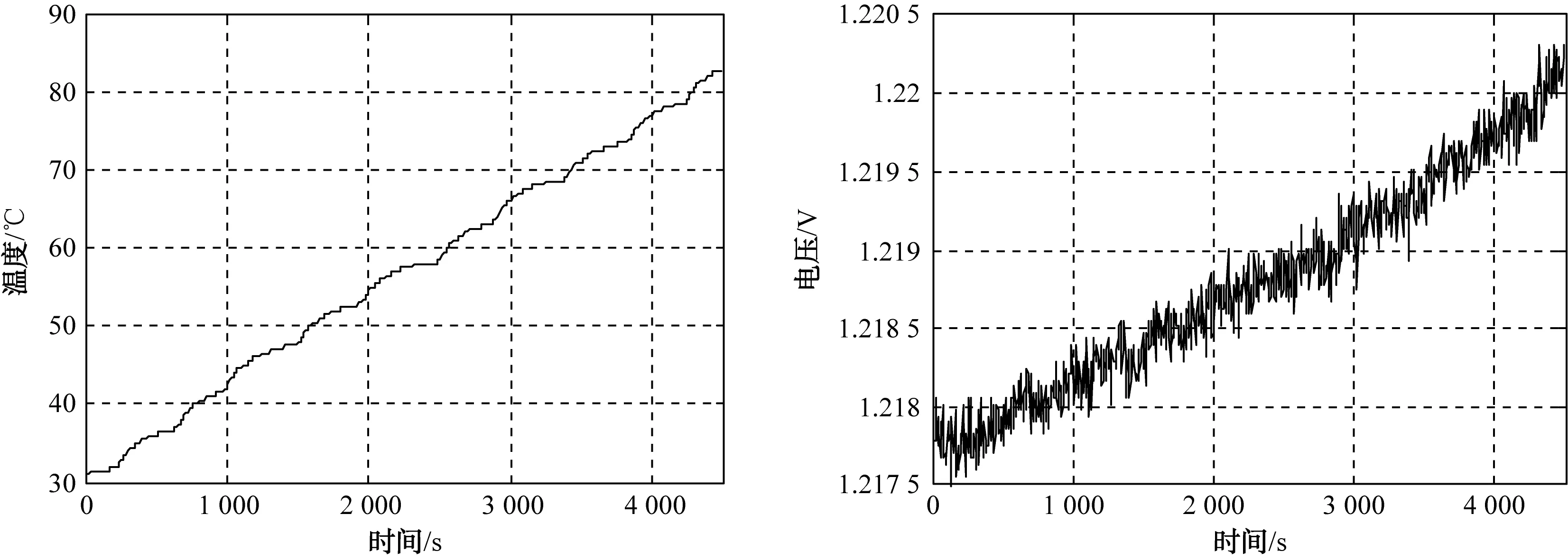
图2 温度、电压原始数据
由温度和电压曲线可以看出,两者均为近似匀速斜坡,电压变化与温度可能存在近似的线性关系。
4 温度特性建模与补偿
关于温度特性的建模与补偿算法有很多种,用的比较多的有最小二乘拟合补偿、BP神经网络、混合线性回归[4](MLR)等。补偿算法的选择要根据实际陀螺仪的工作特性,选择既能有效表征漂移与温度变化特性,又简单易操作的补偿方法。
将温漂试验中采集到的温度、电压数据做出温度-电压关系曲线,研究两者之间的相互关系。图3为滑动平均滤波前后温度与电压的关系曲线,分别为原始的温度-电压数据和滑动平均之后的曲线。可以看出电压与温度为线性关系,建立温漂补偿模型时采用线性补偿就可以达到比较理想的效果[5]。
陀螺仪灵敏度0.83 mV/°/s,AD采样有效精度0.031 1 mV,对电压值做均值处理,保留有效位到0.10 mV,整理结果如表1所示。
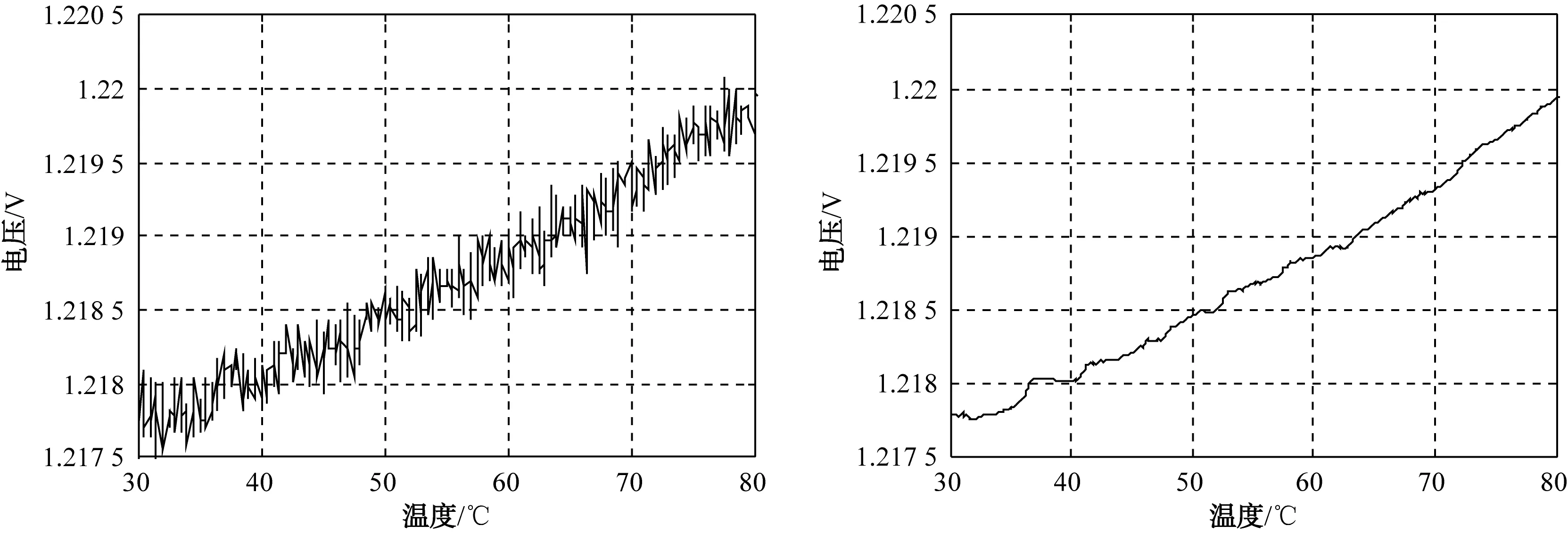
图3 温度-电压关系曲线
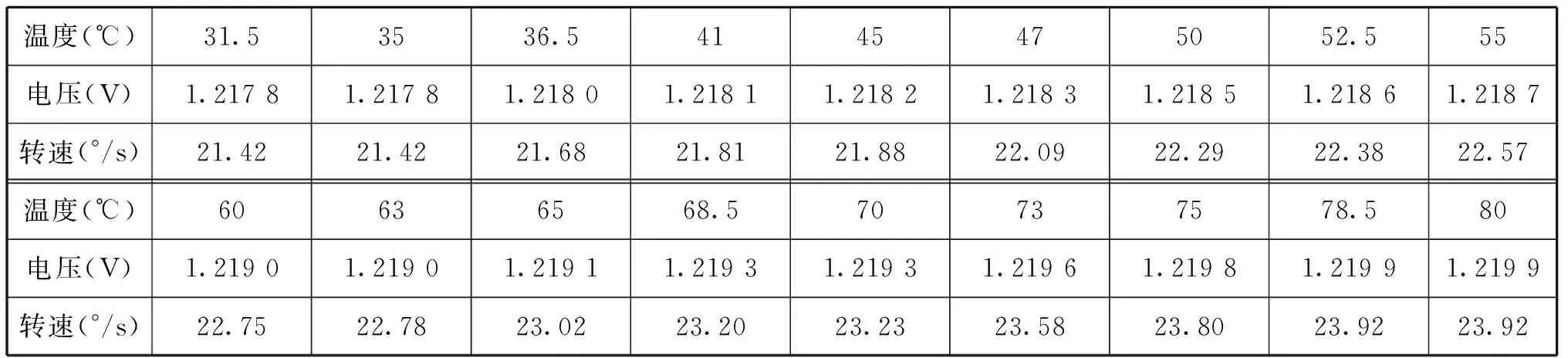
温度(℃)31.53536.54145475052.555电压(V)1.217 81.217 81.218 01.218 11.218 21.218 31.218 51.218 61.218 7转速(°/s)21.4221.4221.6821.8121.8822.0922.2922.3822.57温度(℃)60636568.570737578.580电压(V)1.219 01.219 01.219 11.219 31.219 31.219 61.219 81.219 91.219 9转速(°/s)22.7522.7823.0223.2023.2323.5823.8023.9223.92
陀螺仪性能参数给定零位温度系数为0.02°/s/℃,将电压测量值转换为对应转速,用MATLAB工具对上述数据进行多项式曲线拟合,线性关系为:
f(x)=0.041x+19.80
(6)
式中:f(x)为陀螺仪测量转速与温度的关系;x为温度值。
温度-陀螺仪转速拟合曲线如图4所示。
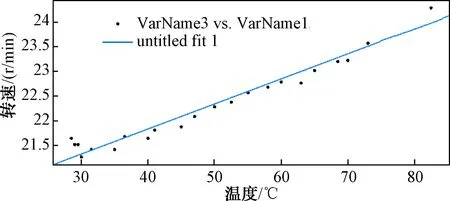
图4 温度-陀螺仪转速拟合曲线
电压漂移量与温度变化呈良好的线性关系,在数据处理时可以有效地进行补偿。曲线拟合可得温度漂移系数为0.041°/s/℃,大于陀螺仪性能参数表给定的0.02°/s/℃,可能原因是信号测量时,受温度影响的不仅仅为陀螺仪,基准电压芯片、信息采集电路等均受影响[6]。
5 结束语
通过温漂试验及数据拟合、标定,得到温度与漂移量之间的线性关系,虽然试验拟合的漂移系数大于陀螺仪性能参数给定值,但是在实际工作过程中可以通过建立温漂补偿模型较好地解决温度影响问题。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
山东冶金(2019年5期)2019-11-16 09:09:38
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
山东工业技术(2016年15期)2016-12-01 05:32:01
人生十六七(2016年14期)2016-12-01 05:24:26
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
湖北经济学院学报·人文社科版(2015年8期)2015-12-29 05:53:07
现代农业(2015年1期)2015-02-28 18:40:09
上海电机学院学报(2015年4期)2015-02-28 14:30:00
计算物理(2014年2期)2014-03-11 17:01:39